31. Сквт. Первичное симметрирование.
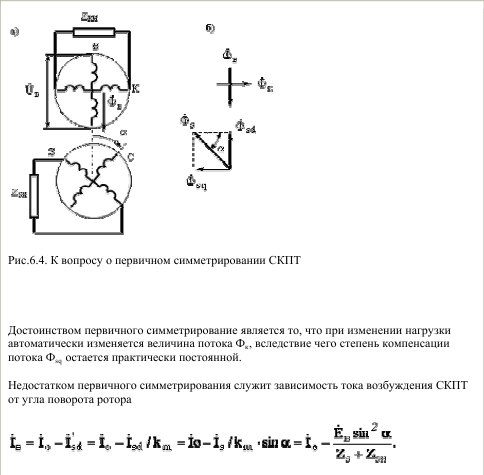
П е р в и ч н о е симметрирование выполняется со стороны статора и заключается в
замыкании компенсационной обмотки на какое-то сопротивление или накоротко (рис.
6.4). Условием первичного симметрирования является равенство (симметрия) полных
сопротивлений цепи обмотки возбуждения и цепи компенсационной обмотки: Zис+ Zв= Zк
+ Zкн, где Zис - сопротивление источника. Поскольку Zв= Zк, условие симметрии
выливается в равенство Zис= Zкн. Если принять, что внутренне сопротивление мощного
источника равно нулю Zис = 0, то и Zкн= 0, т.е. первичное симметрирование сводится к
замыканию компенсационной обмотки накоротко.
Сущность первичного симметрирования состоит в том, что поперечный поток Фsq,
пульсируя по оси компенсационной обмотки, индуцирует в ней ЭДС и ток, который
создает магнитный поток Фк, направленный встречно потоку Фsq (рис.6.4,б). В результате
поток Фsqи его искажающее действие в значительной мере уменьшаются.
33. Сквт. Вторичное симметрирование.
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление ZнС (рис. 5.27, а). В этом случае ток, проходящий по обмотке С, создает МДС FС , которую можно представить, так же как и МДС FS , в виде векторной суммы двух составляющих (рис. 5.27,б): продольной FСd = FС cos θ и поперечной FCq = FС sin θ. Продольная составляющая FCd совпадает по направлению с FSd , a поперечная составляющая FCq направлена против FSq . При FCq = FSqпоперечный поток Фq = 0. Следовательно, не возникает и погрешность, обусловленная этим потоком. Сопротивление ZнС, при котором обеспечено полное симметрирование, можно определить из условия
(5.53)
FS cos θ = FC sin θ
или с учетом значений FS и FC
(5.54)
ZS + ZнS = ZC + ZнC ,
т. е. полное симметрирование наблюдается при равенстве комплексных сопротивлений в цепи обмоток S и С ротора, т. е. их активных и реактивных составляющих. При вторичном симметрировании компенсируются МДС по поперечной оси; кроме того, ток Iв в обмотке возбуждения поворотного трансформатора не зависит от угла поворота, так как в формулу для результирующей продольной составляющей МДС ротора F́2d = F́Sd + F́Cd (определяющей силу тока Iв) не входит какаялибо функция угла θ:
F́2d = F́S sin θ + F́C cos θ = |
|
sin θ + |
|
cos θ = |
|
Éв , |
где Z2 = ZS = ZC ; Zн = ZнS = ZнC .
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
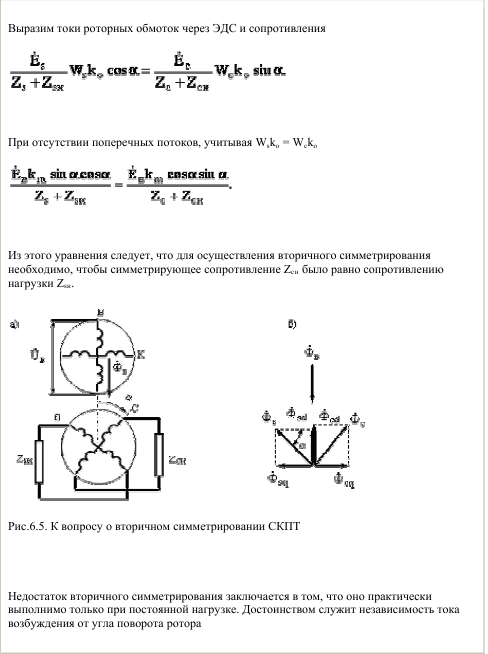
В т о р и ч н о е симметрирование выполняется со стороны ротора в том случае, когда
нагрузка подключается только к одной обмотке, например к синусной. Оно заключается в
замыкании второй роторной обмотки на сопротивление Zнс (рис.6.5,а). Его сущность
состоит в том, что поперечные составляющие потоков Фsq и Фcq всегда направлены
встречно и при правильном выборе Zнс в значительной мере ослабляют друг друга
(рис.6.5,б).
При выполнении вторичного симметрирования Fsq= Fcq или