

Розділ 2 додатковий матеріал Режими побудов
Кнопки для включення і відключення режимів побудов, як Ви вже знаєте, згруповані у відповідному рядку (рис. 1.1). У цьому розділі розглянуті режими, про які не згадувалося в основних розділах.
Режим POLAR (Полярний) є розширенням режиму ORTHO і здійснює включення треків відстеження із заданим кутовим кроком. Цей режим зручно використовувати для побудови відрізків з однаковим кутом нахилу один до одного.
На рис. 2.1 наведений приклад використання режиму POLAR – побудова декількох відрізків з кутовим кроком 30°.
|
Рисунок 2.1 – Застосування режиму полярного відстеження |
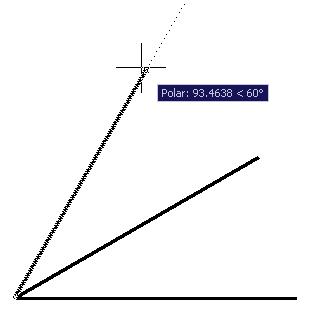
Перед завданням другої точки відрізка курсор зміщається в приблизному напрямку майбутнього відрізка до появи треку. Разом із треком з'являється також інтерактивна підказка, у якій відображається поточне значення довжини відрізка і кут його нахилу до горизонталі (на рис. 2.1 поточна довжина відрізка 93.4638, кут нахилу 60°). Далі можна зафіксувати кінцеву точку відрізка інтерактивним способом або ввести в командний рядок довжину відрізка.
Для настройки режиму POLAR необхідно підвести курсор до відповідної кнопки в рядку режимів і викликати за допомогою ПМ опцію Settings (Настройка). В результаті з'явиться вікно настройки режимів з активною вкладкою Polar Tracking (Полярне відстеження) – рис. 2.2.
|
Рисунок 2.2 – Вкладка Polar Tracking |
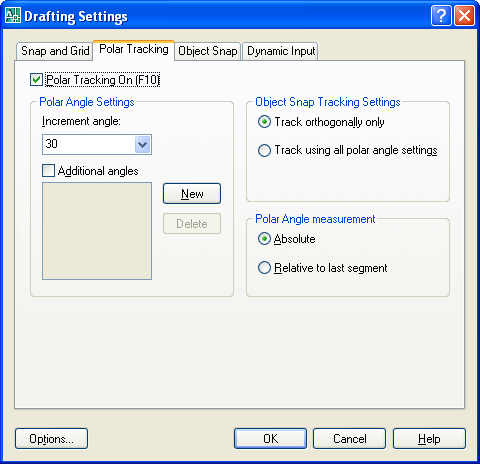
Область Polar Angle Settings (Настройка полярного кута) містить наступні елементи:
- список Increment angle (Основний кут) для вибору кутового кроку треку (автоматично містить значення 90°; 45°; 30°; 22,5°; 18°; 15°; 10°; 5°);
- прапорець Additional angles (Додаткові кути) для завдання додаткових (які не входять у список Increment angle) кутів відстеження (після активації прапорця необхідно натиснути кнопку New (Новий) і ввести значення додаткових кутів, що відобразяться в полі під прапорцем).
Область Polar angle measurement (Вимірювання полярного кута) містить два перемикачі:
- Absolute (Абсолютний) для включення відліку кутів треку від горизонталі;
- Relative to last segment (Відносно останнього сегмента) для включення відліку кутів треку від відрізка, побудованого останнім.
Режими POLAR і ORTHO є взаємовиключними. Тому при включенні одного з них автоматично відключається інший.
Режим OTRAK (Об'єктне відстеження) здійснює включення ортогональних треків відстеження відносно характерних точок об'єктів. Режим працює разом із включеними глобальними прив'язками. Його зручно використовувати для прив'язки до точок, що лежать на перетині ортогональних ліній, проведених з характерних точок об'єктів.
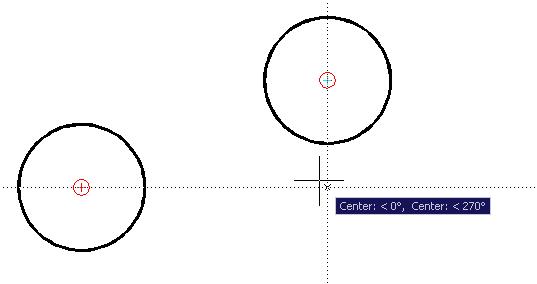
На рис. 2.3 наведений приклад використання режиму OTRAK – прив'язка початкової точки відрізка до перетину ортогональних треків, що проходять через центри кіл (у переліку глобальних прив'язок повинна бути включена відповідна прив'язка). Після активації команди Line курсор був зміщений до центра лівого кола, в результаті чого після спрацьовування прив'язки з'явився горизонтальний трек. Далі курсор був зміщений до центра правого кола, в результаті чого після спрацьовування прив'язки з'явився вертикальний трек. Далі курсор був зміщений приблизно до місця перетину треків, що привело до появи відповідного маркера ×. Початкова точка відрізка була зафіксована за допомогою ЛМ.
|
Рисунок 2.3 – Застосування режиму об'єктного відстеження |
Для настройки режиму OTRAK призначена область Object Snap Tracking Settings (Настройка прив'язки об'єктного відстеження) – рис. 2.2. Вона містить два перемикачі, дія яких відповідає їх назвам:
- Tracking orthogonally only (Відстежувати тільки ортогонально);
- Tracking using all polar angle settings (Відстежувати з використанням всіх настройок полярного кута).
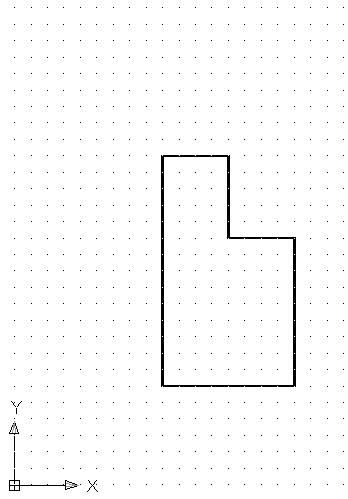
Режим GRID (Сітка) здійснює включення координатної сітки, яка може бути використана в якості допоміжної при побудовах (рис. 2.4).
Для настройки параметрів сітки необхідно підвести курсор до кнопки GRID, викликати за допомогою ПМ опцію Settings. В результаті з'явиться вікно настройки режимів з активною вкладкою Snap and Grid (Крок і сітка) – рис. 2.5.
Розглянемо основні елементи вікна.
Область Grid spacing (Розміри сітки) містить наступні елементи:
- поле Grid X (Y) spacing [Крок сітки вздовж осі х (y)] для завдання кроку сітки вздовж координатних осей;
- поле Major line every (Основна лінія кожні) для завдання числа додаткових ліній сітки між основними.
|
Рисунок 2.4 – Включення режиму GRID |
|
Рисунок 2.5 – Вкладка Snap and Grid |
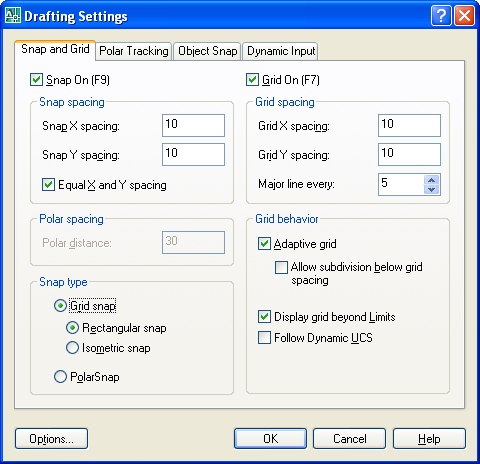
Режим SNAP (Крок) здійснює включення дискретного руху курсору з кроком, який настроюється. Розміри кроку курсору і додаткових ліній сітки звичайно настроюють однаковими для можливості прив'язки до вузлів сітки.
Для настройки режиму використовується вкладка Snap and Grid.
Область Snap spacing (Розміри кроку) містить наступні елементи:
- поле Snap X (Y) spacing [Крок вздовж осі х (y)] для завдання кроку вздовж координатних осей;
- прапорець Equal X and Y spacing (Однакові відстані вздовж осей х і у).
Область Snap type (Тип кроку) містить перемикачі як для настройки кроку, так і для настройки сітки:
- Grid snap (Крок по сітці) для включення кроку по сітці;
- Rectangular snap (Прямокутний крок) для включення кроку по прямокутній сітці;
- Isometric snap (Ізометричний крок) для включення кроку по ізометричній сітці;
- Polar snap (Полярний крок) для включення кроку вздовж полярних треків, величина якого задається у полі Polar distance (Полярна відстань) [перемикач діє в режимі POLAR].
На рис. 2.6 наведений приклад побудови об'єктів при активному перемикачі Isometric snap.