

Машины постоянного тока.
Коллектор представляет собой цилиндр, состоящий из медных пластин, изолированных друг от друга и от вала. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или металлографитные щетки. Щетки расположены в специальных щеткодержателях. С помощью коллектора и щеток вращающаяся обмотка якоря соединяется с внешней электрической цепью. В большинстве случаев якорь машин постоянного тока имеет не четыре паза, в которые закладывается обмотка якоря, не четыре секции и коллекторные пластины, а значительно большее их число; кроме того, секции состоят обычно из нескольких витков. Вследствие этого оказывается возможным получить намного большую ЭДС между щетками, а значение ЭДС при вращении якоря остается практически неизменным. Следует заметить, что значение ЭДС между щетками зависит от места расположения последних. Для получения наибольшей ЭДС щетки следует устанавливать таким образом, чтобы ЭДС всех секций в пределах одной параллельной ветви были направлены в одну и ту же сторону. Этому условию удовлетворяет установка щеток на геометрической нейтрали, под которой понимают линию, проходящую через ось машины и те точки поверхности якоря, где магнитная индукция поля главных полюсов равна нулю. Геометрическая нейтраль двухполюсной машины расположена перпендикулярно оси главных полюсов. Следует учесть, что выражение «установка щеток на геометрической нейтрали» является условным и на самом деле означает, что щетки должны располагаться в таком месте, чтобы они замыкали накоротко секции, находящиеся на геометрической нейтрали.
Для уменьшения потерь мощности от перемагничивания и вихревых токов набирают из стальных листов.
Eя = CE*n*Ф; CE = 2рN/60а N –количество рамок, а – количество активных проводников в одной секции якоря.
U = Eя + IяRя – двигатель, Eя = U + IяRя – генератор.
О
 сновным
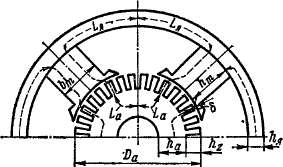
магнитным потоком Фб
называется поток в воздушном зазоре
б, приходящийся на один главный полюс
машины. Величина Фб определяет величину
индуктируемой в обмотке якоря э. д. с.
При проектировании машины постоянного
тока возникает необходимость определения
зависимости Фб от тока возбуждения
полюсов. Эта задача решается путем
расчета магнитной цепи машины при
холостом ходе, когда ток якоря 1а
= 0. Вследствие
симметрии устройства машины и равенства
потоков всех полюсов достаточно
рассмотреть магнитную цепь одной пары
полюсов. Магнитная цепь машины изображена
на рис. 2-1, причем для каждого полюса
штриховой линией показана такая
магнитная линия потока Ф6,
длину которой можно считать средней
для всех магнитных линий. Магнитную
цепь можно рассчитать на основе закона
полного тока для средней магнитной
линии (рис. 2-1):
сновным
магнитным потоком Фб
называется поток в воздушном зазоре
б, приходящийся на один главный полюс
машины. Величина Фб определяет величину
индуктируемой в обмотке якоря э. д. с.
При проектировании машины постоянного
тока возникает необходимость определения
зависимости Фб от тока возбуждения
полюсов. Эта задача решается путем
расчета магнитной цепи машины при
холостом ходе, когда ток якоря 1а
= 0. Вследствие
симметрии устройства машины и равенства
потоков всех полюсов достаточно
рассмотреть магнитную цепь одной пары
полюсов. Магнитная цепь машины изображена
на рис. 2-1, причем для каждого полюса
штриховой линией показана такая
магнитная линия потока Ф6,
длину которой можно считать средней
для всех магнитных линий. Магнитную
цепь можно рассчитать на основе закона
полного тока для средней магнитной
линии (рис. 2-1):
г![]()
![]() де
Н — напряженность магнитного поля; d\
— элемент
длины магнитной линии; ^i
— полный
ток, охватываемый магнитной линией.
Точное вычисление линейного интеграла
(2-1) на практике затруднительно. Поэтому
магнитную цепь разбивают на участки:
воздушный зазор (б), зубцы якоря (кг),
спинку якоря
(La),
•полюсы
(hm),
ярмо (Lfl)
и заменяют интеграл суммой, предполагая,
что на протяжении каждого участка Н
постоянна.
Тогда вместо равенства (2-1) получим где
б, hz,
La,
hw,
Ья
— показанные
на рис. 2-1 геометрические размеры, равные
длинам отрезков средней магнитной
линии; #а, Нг,
На,
Нт,
Ня
— напряженности
магнитного поля на соответствующих
участках; шв
— число витков обмотки возбуждения на
полюс; tB
— ток возбуждения. Отдельные члены
соотношения (2-2а) представляют собой
намагничивающие силы (н. с.) отдельных
участков магнитной цепи, а их сумма —
полную н. с. машины на пару полюсов. Так
как для каждого участка магнитной цепи
н. с. F =
HI, то
вместо (2-2а) можно также написать где FB
— полная н.
с. на один полюс.
де
Н — напряженность магнитного поля; d\
— элемент
длины магнитной линии; ^i
— полный
ток, охватываемый магнитной линией.
Точное вычисление линейного интеграла
(2-1) на практике затруднительно. Поэтому
магнитную цепь разбивают на участки:
воздушный зазор (б), зубцы якоря (кг),
спинку якоря
(La),
•полюсы
(hm),
ярмо (Lfl)
и заменяют интеграл суммой, предполагая,
что на протяжении каждого участка Н
постоянна.
Тогда вместо равенства (2-1) получим где
б, hz,
La,
hw,
Ья
— показанные
на рис. 2-1 геометрические размеры, равные
длинам отрезков средней магнитной
линии; #а, Нг,
На,
Нт,
Ня
— напряженности
магнитного поля на соответствующих
участках; шв
— число витков обмотки возбуждения на
полюс; tB
— ток возбуждения. Отдельные члены
соотношения (2-2а) представляют собой
намагничивающие силы (н. с.) отдельных
участков магнитной цепи, а их сумма —
полную н. с. машины на пару полюсов. Так
как для каждого участка магнитной цепи
н. с. F =
HI, то
вместо (2-2а) можно также написать где FB
— полная н.
с. на один полюс.
П ри
постепенном увеличении тока возбуждения
ЭДС якоря сначала растёт, а потом
переходит в режим насыщения. Если начать
плавно снижать ток возбуждения, то
кривая ЭДС якоря будет описывать
несколько другую зависимость отличную
отпервоначальной. Её называют отстающей
ЭДС. Её появление характеризует
возникновение остаточной магнитной
индукции в станине машины, в следствии
увеличения влияния гистерезиса.
ри
постепенном увеличении тока возбуждения
ЭДС якоря сначала растёт, а потом
переходит в режим насыщения. Если начать
плавно снижать ток возбуждения, то
кривая ЭДС якоря будет описывать
несколько другую зависимость отличную
отпервоначальной. Её называют отстающей
ЭДС. Её появление характеризует
возникновение остаточной магнитной
индукции в станине машины, в следствии
увеличения влияния гистерезиса.
Рассмотрим реакцию якоря в наиболее часто встречающемся случае расположения щеток на геометрической нейтрали.
На рис. 9.8, б показано магнитное поле, образованное под действием МДС обмотки якоря, а на рис. 9.8, в — результирующее магнитное поле машины. Указанные на рис. 9.8, в направления токов обмотки якоря соответствуют указанным там же направлениям вращения генератора и двигателя. В случае расположения щеток на геометрической нейтрали возникает поперечная реакция якоря, характеризуемая тем, что ось симметрии поля реакции якоря (рис. 9.8, б) перпендикулярна оси главных полюсов. В результате действия поперечной реакции якоря магнитное поле машины оказывается несимметричным относительно оси главных полюсов (рис. 9.8, в). Под одним краем каждого полюса магнитная индукция увеличивается, под другим уменьшается. Физическая нейтраль ФН, под которой понимают линию, проходящую через ось машины и точки поверхности якоря, где магнитная индукция результирующего поля равна нулю, смещается у генератора по направлению вращения, у двигателей — против направления вращения. При отсутствии тока якоря физическая нейтраль совпадает с геометрической (рис. 9.8, а). В результате действия реакции якоря в секциях обмотки якоря, расположенных на геометрической нейтрали, возникает ЭДС. Между коллекторными пластинами, присоединенными к секциям, находящимся в усиленном магнитном поле главных полюсов, появляется повышенное напряжение, что может привести к возникновению дуги между коллекторными пластинами. Для устранения искажения магнитного поля под полюсами крупные машины, работающие с частыми и значительными перегрузками, снабжаются компенсационной обмоткой. Последнюю закладывают в пазы полюсных наконечников (рис. 9.9) и соединяют последовательно с обмоткой якоря, в результате чего создается магнитное поле в зоне расположения полюсов, противоположное по направлению полю реакции якоря.
Влияние поперечной реакции якоря на результирующее магнитное поле зависит от степени насыщения ферромагнитного материала магнитной цепи и значения тока якоря. В общем случае из-за насыщения ферромагнитного материала магнитная индукция под одним краем полюса возрастает меньше, чем уменьшается под другим; в результате магнитный поток машины несколько уменьшается. Однако при нагрузках, на которые рассчитываются машины при нормальных условиях их работы, магнитный поток изменяется на относительно небольшое значение, поэтому влияние поперечной реакции якоря на магнитное поле при расчетах часто не учитывают.


Под коммутацией в машинах постоянного тока понимают процесс переключения секций обмотки якоря из одной параллельной ветви в другую, сопровождающийся изменением направления тока в секциях. Для улучшения коммутации машины мощностью 1 кВт и более снабжаются дополнительными полюсами. В машинах с дополнительными полюсами щетки устанавливают на геометрической нейтрали. С помощью дополнительных полюсов в зоне коммутации создается магнитное поле, в результате чего в коммутируемых секциях индуктируется ЭДС, компенсирующая ЭДС eL, eM и ev. Так как ЭДС eL, eM и ev зависят от тока якоря, то для их компенсации при различных нагрузках обмотку дополнительных полюсов включают последовательно с якорем. Вследствие насыщения дополнительных полюсов при перегрузках машины условия коммутации ухудшаются и под щетками появляется недопустимое искрение. Наибольший допустимый ток машин постоянного тока определяется условиями коммутации и лежит для различных машин в пределах (2 ÷ 3) Iном , где Iном — номинальный ток машины.
Смотри предыдущий ответ!!!
Для того чтобы генератор возбудился, должны быть выполнены два условия: 1) генератор должен иметь магнитный поток остаточного намагничивания Ф0; 2) обмотка возбуждения должна быть подключена к якорю так, чтобы ею создавался магнитный поток, совпадающий по направлению с потоком остаточного намагничивания. Процесс самовозбуждения можно пояснить следующим образом. Магнитным потоком Ф0 в обмотке якоря индуктируется ЭДС Е0, под действием которой в обмотке возбуждения возникает ток Iв0, возбуждаюший магнитный поток Ф1 > Ф0. Потоком Ф1 > Ф0 в обмотке якоря индуктируется ЭДС Е1 > Е0, под действием которой в обмотке возбуждения возникает ток Iв1 > Iв0, вызывающий магнитный поток Ф2 > Ф1, и т. д.
Схемы включения генератора независимая, параллельная;Внешние характеристики независимая, смешаный
параллельная,






Существенный недостаток генератора параллельного возбуждения, заключающийся в относительно большом изменении напряжения при колебаниях нагрузки, легко устраняется у генераторов смешанного возбуждения с помощью второй, последовательной обмотки возбуждения С1 — С2, схема выше.
Ее можно регулировать тремя способами: 1) включением добавочного реостата Rдоб в цепь обмотки якоря; 2) изменением магнитного потока Ф; 3) изменением питающего напряжения U. При питании двигателей от источника постоянного напряжения (см. рис. 9.22) частоту вращения можно регулировать следующим образом: 1) изменением сопротивления цепи якоря; 2) изменением значения магнитного потока. Естественно, что второй метод регулирования применим лишь к двигателям параллельного и смешанного возбуждения. Для регулирования частоты вращения путем изменения сопротивления цепи якоря обычно используют тот же реостат, что и для пуска двигателя. Например, с помощью реостата, для которого на 9.27 изображены механические характеристики, при моменте М = Мс можно получить частоты вращения n4, n5 и n6. В том случае, когда необходимо иметь и другие частоты вращения, реостат снабжают дополнительными ступенями сопротивлений. Реостат, используемый как для пуска, так и для регулирования частоты вращения, находится в отношении нагревания в более тяжелых условиях, чем реостат, служащий только для пуска. При изменении сопротивления в цепи якоря происходит следующее. Допустим, что двигатель параллельного, последовательного или смешанного возбуждения работает на естественной характеристике с моментом М = Мс и частотой вращения nс (см. рис. 9.27). В первое мгновение после включения в цепь якоря реостата с сопротивлением r = r1 + r2 + r3 из-за инерционности двигателя частота вращения не изменяется. Увеличение сопротивления при неизменной частоте вращения приводит к уменьшению тока якоря, а значит, и момента двигателя. При частоте вращения nс двигатель перейдет на характеристику 1 и будет развивать момент М3 . Так как М3 < Мс, то начнется переходный процесс, при котором частота вращения двигателя будет снижаться. Это вызывает уменьшение ЭДС, а следовательно, увеличение тока якоря и момента двигателя. Установившийся режим наступает при частоте вращения n4, при которой М = Мс. Рассматриваемый способ регулирования частоты вращения не требует сложного оборудования и дает возможность получить любую пониженную частоту вращения при заданной нагрузке. Однако он имеет и существенные недостатки. Одними из из них являются «мягкие» искусственные механические характеристики, благодаря чему частота вращения при данном сопротивлении сильно зависит от нагрузки двигателя. «Мягкие» характеристики затрудняют получение требуемых, особенно низких частот вращения при различных нагрузках. Другой недостаток заключается в том, что регулирование частоты вращения сопровождается потерями мощности в реостате, которые возрастают по мере увеличения сопротивления r и снижения частоты вращения. Умножив правую и левую части уравнения (9.18) на ток якоря, получим уравнение баланса мощности цепи якоря
UIя = ЕIя + Iя2(rя + r), где UIя — мощность, потребляемая из сети; ЕIя — электромагнитная мощность, т. е мощность, преобразуемая электродвигателем из электрической в механическую; Iя2(rя + r) — потери мощности в сопротивлениях цепи якоря.
|
Рис. 9.28. Электромехани- ческая характе- ристика nе(I) и зависимость М(I) (а); механические характеристики n(М) двигателя последова тельного возбуждения к примерам 9.3 и 9.5 (б)
|

Д
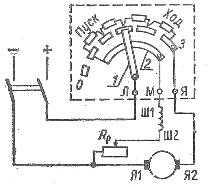 ля
регулирования частоты вращения путем
изменения сопротивления цепи якоря
обычно используют тот же реостат, что
и для пуска двигателя. Например, с
помощью реостата, для которого на 9.27
изображены механические характеристики,
при моменте М
= Мс
можно получить частоты вращения n4,
n5
и n6.
В том случае, когда необходимо иметь и
другие частоты вращения, реостат
снабжают дополнительными ступенями
сопротивлений. Реостат, используемый
как для пуска, так и для регулирования
частоты вращения, находится в отношении
нагревания в более тяжелых условиях,
чем реостат, служащий только для пуска.
ля
регулирования частоты вращения путем
изменения сопротивления цепи якоря
обычно используют тот же реостат, что
и для пуска двигателя. Например, с
помощью реостата, для которого на 9.27
изображены механические характеристики,
при моменте М
= Мс
можно получить частоты вращения n4,
n5
и n6.
В том случае, когда необходимо иметь и
другие частоты вращения, реостат
снабжают дополнительными ступенями
сопротивлений. Реостат, используемый
как для пуска, так и для регулирования
частоты вращения, находится в отношении
нагревания в более тяжелых условиях,
чем реостат, служащий только для пуска.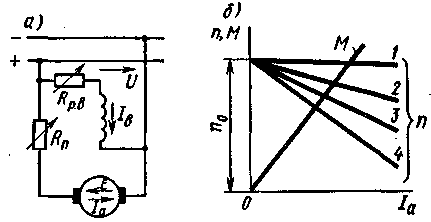
 параллельное
параллельное
 последовательное
последовательное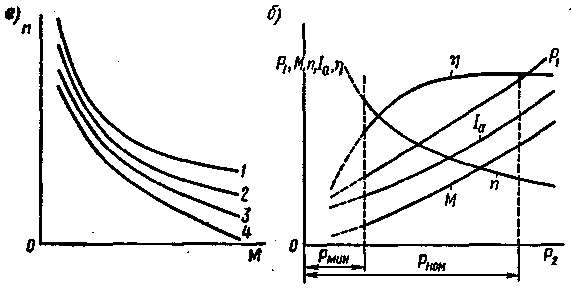
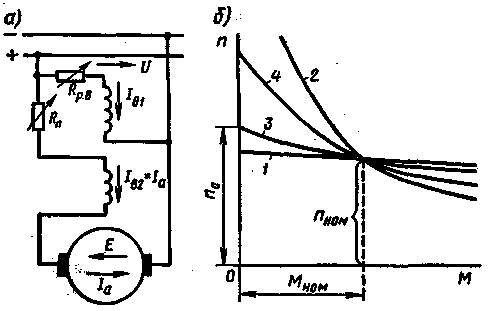
Двигатель с параллельным возбуждением. В этом двигателе обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в., а в цепь якоря — пусковой реостат Rп . Характерной особенностью двигателя является то, что его ток возбуждения Iв не зависит от тока якоря Iа (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. Следовательно, линейна и механическая характеристика двигателя..
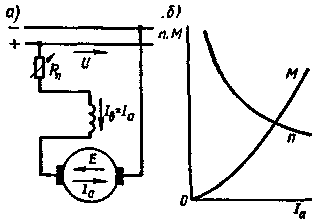
Двигатель с последовательным возбуждением. В этом двигателе ток возбуждения Iв = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря Ia. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Ia < (0,8 ÷ 0,9)Iном, когда магнитная система машины не насыщена, Ф = kф Ia , причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем Ia , и при больших нагрузках (Ia > Iном ) можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia) и М = f(Ia). При Ia <(0,8 ÷ 0,9)Iном скоростная характеристика двигателя n = f(Ia) (рис. 8.61, б) имеет форму гиперболы.
Двигатель со смешанным возбуждением. В этом двигателе (рис. 8.63, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной и последовательной. Поэтому его механические характеристики (рис. 8.63,б, кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения n0 имеет конечное значение.
Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Как следует из (8.84), это можно осуществить двумя способами: путем изменения направления тока Iа в обмотке якоря или изменения направления магнитного потока Ф, т. е. тока возбуждения. Для этого переключают провода, подводящие ток к обмотке якоря или обмотке возбуждения.
Продолжит работать пока не остановить или напряжение не отключить т.к. обмотка возбуждения и обмотка якоря питаются от разных источников питания.
Р
 абота
машины постоянного тока сопровождается
различного рода потерями энергии,
вызывающими нагрев ее частей. Прежде
всего в машине имеют место электрические
потери во внутренних сопротивлениях
якоря pЭЛ
(включая сопротивление щетка - коллектор),
которые составляют около 50% всех потерь
в машине при номинальном режиме. Эти
потери пропорциональны квадрату тока
якоря. Далее имеют место потери магнитные
в сердечнике якоря pМГ
(составляют 1…3% от РН),
механические потери от трения и
вентиляции рМЕХ
(составляют менее 1…2% от РН),
электрические потери в цепи возбуждения
рЭЛ.В
(составляют
0,5…7% от РН).
Все перечисленные потери (кроме потерь
в обмотке якоря) практически не зависят
от нагрузки. Энергетические диаграммы
для генератора и двигателя приведены
на рис. КПД машин постоянного тока
зависит от мощности и изменяется в
пределах (70…96)%.
абота
машины постоянного тока сопровождается
различного рода потерями энергии,
вызывающими нагрев ее частей. Прежде
всего в машине имеют место электрические
потери во внутренних сопротивлениях
якоря pЭЛ
(включая сопротивление щетка - коллектор),
которые составляют около 50% всех потерь
в машине при номинальном режиме. Эти
потери пропорциональны квадрату тока
якоря. Далее имеют место потери магнитные
в сердечнике якоря pМГ
(составляют 1…3% от РН),
механические потери от трения и
вентиляции рМЕХ
(составляют менее 1…2% от РН),
электрические потери в цепи возбуждения
рЭЛ.В
(составляют
0,5…7% от РН).
Все перечисленные потери (кроме потерь
в обмотке якоря) практически не зависят
от нагрузки. Энергетические диаграммы
для генератора и двигателя приведены
на рис. КПД машин постоянного тока
зависит от мощности и изменяется в
пределах (70…96)%.
В машинах постоянного тока различают следующие основные виды потерь мощности:
Потери мощности в сопротивлениях цепи якоря: ΔРя = Iя2rя. Как видно, потери мощности ΔРя зависят от нагрузки машины. Поэтому их называют переменными потерями мощности.
Потери мощности в стали ΔРc, вызванные главным образом вихревыми токами и перемагничиванием магнитопровода якоря при его вращении. Частично эти потери возникают из-за вихревых токов в поверхностном слое полюсных наконечников, вызванных пульсацией магнитного потока при вращении якоря.
Механические потери мощности ΔРмех , причиной которых является трение в подшипниках, щеток о коллектор, вращающихся частей о воздух.
Потери мощности в цепи параллельной или независимой обмотки возбуждения: ΔРв = UвIв = Iв2rв.
Потери ΔРс, ΔРмех , ΔРв при изменении нагрузки машин меняются незначительно, вследствие чего их называют постоянными потерями мощности.
К
 ПД
машин постоянного тока η
= P2/P1,
где Р2
— полезная мощность машины (у генератора
— это электрическая мощность, отдаваемая
приемнику, у двигателя — механическая
мощность на валу); Р1
— подводимая к машине мощность (у
генератора — это механическая мощность,
сообщаемая ему первичным двигателем,
у двигателя — мощность, потребляемая
им от источника постоянного тока; если
генератор имеет независимое возбуждение,
то P1
включает в себя также мощность,
необходимую для питания цепи обмотки
возбуждения). Очевидно, мощность Р1
может быть выражена следующим образом:
Р1
= Р2
+ ΣΔP,
где
ΔP
— сумма перечисленных
выше потерь мощности. С учетом последнею
выражения η
= P2/(P2
+ ΣΔP).
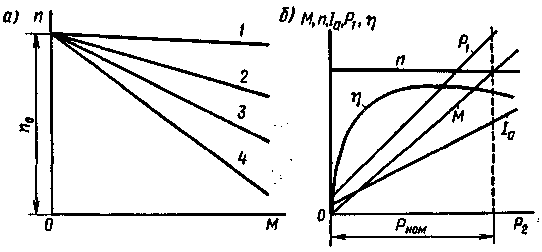
Когда
машина работает вхолостую, полезная
мощность Р2
равна нулю и η = 0. Характер изменения
КПД при увеличении полезной мощности
зависит от значения и характера изменения
потерь мощности. Примерный график
зависимости η (Р2)
приведен на рис. При увеличении полезной
мощности КПД сначала возрастает при
некотором значении Р2,
достигает наибольшего значения, а затем
уменьшается. Последнее объясняется
значительным увеличением переменных
потерь, пропорциональных квадрату
тока. Машины рассчитывают обычно таким
образом, чтобы наибольшее значение КПД
находилось в области, близкой к
номинальной мощности Р2ном
. Номинальное значение КПД машин
мощностью от 1 до 100 кВт лежит примерно
в пределах от 0,74 до 0,92 соответственно.
ПД
машин постоянного тока η
= P2/P1,
где Р2
— полезная мощность машины (у генератора
— это электрическая мощность, отдаваемая
приемнику, у двигателя — механическая
мощность на валу); Р1
— подводимая к машине мощность (у
генератора — это механическая мощность,
сообщаемая ему первичным двигателем,
у двигателя — мощность, потребляемая
им от источника постоянного тока; если
генератор имеет независимое возбуждение,
то P1
включает в себя также мощность,
необходимую для питания цепи обмотки
возбуждения). Очевидно, мощность Р1
может быть выражена следующим образом:
Р1
= Р2
+ ΣΔP,
где
ΔP
— сумма перечисленных
выше потерь мощности. С учетом последнею
выражения η
= P2/(P2
+ ΣΔP).
Когда
машина работает вхолостую, полезная
мощность Р2
равна нулю и η = 0. Характер изменения
КПД при увеличении полезной мощности
зависит от значения и характера изменения
потерь мощности. Примерный график
зависимости η (Р2)
приведен на рис. При увеличении полезной
мощности КПД сначала возрастает при
некотором значении Р2,
достигает наибольшего значения, а затем
уменьшается. Последнее объясняется
значительным увеличением переменных
потерь, пропорциональных квадрату
тока. Машины рассчитывают обычно таким
образом, чтобы наибольшее значение КПД
находилось в области, близкой к
номинальной мощности Р2ном
. Номинальное значение КПД машин
мощностью от 1 до 100 кВт лежит примерно
в пределах от 0,74 до 0,92 соответственно.На рисунке выше - Энергетические диаграммы генератора (а), двигателя (б).