

Синхронные машины
При нагрузке ток обмотки якоря создает вращающееся магнитное поле, частота вращения которого равна n1=n (поле якоря неподвижно относительно вращающегося ротора). Воздействие поля якоря на поле возбуждения называется реакцией якоря. При индуктивной нагрузке поле якоря направлено навстречу полю возбуждения (продольная размагничивающая реакция якоря), при активной нагрузке поле якоря искажает и ослабляет поле возбуждения (поперечная и небольшая продольная реакции якоря), при емкостной нагрузке поле якоря усиливает поле возбуждения (подмагничивающая реакция якоря).
Определение индуктивных сопротивлений Xd и Xq - по продольной оси Xd = Е0/Iк , где ЭДС Е0 и ток Iк должны быть взяты при одном и том же значении тока возбуждения (рис. 6.30, а). Если известны коэффициенты приведения kd и kq , то по полученному значению Xd можно определить синхронное индуктивное сопротивление по поперечной оси Хq = (kq /kd ) Xd . В неявнополюсных машинах Xd = Xq = Хсн , т. е. Хсн = Е0/Iк . Если выразить синхронные индуктивные сопротивления в относительных единицах, то
 Xd*=(Iаном
/Uном
)Xd
; Xq*
= (Iаном
/Uном
)Xq
, где Iаном
и Uном
— номинальные значения фазных тока и
напряжения. В современных синхронных
явнополюсных машинах средней и большой
мощности Xd*
= 0,6 ÷ 1,6, а Xq*
= 0,4 ÷ 1. Сопротивление Xd*
определяется в основном реакцией якоря,
так как относительная величина
индуктивного сопротивления, обусловленного
потоком рассеяния, мала (Xσa*
= 0,1 ÷ 0,2). В неявнополюсных машинах
средней и большой мощности обычно
сопротивление Хсн*
= 0,9 ÷ 2,4. Сопротивления, выраженные в
относительных единицах, характеризуют
параметры машины, показывая относительную
(относительно номинального напряжения)
величину падения напряжения при
номинальном токе. Кроме того, эти
величины позволяют сравнивать свойства
генераторов различной мощности. Иногда
в паспорте машины указывают величину,
обратную Xd*
, называемую отношением короткого
замыкания:ОКЗ
= 1/Xd*
= Uном
/(Iaном
Xd
). Это
отношение характеризует значение
установившегося тока к. з.
Iк.ном
= ОКЗ*Iном
, который возникает при номинальном
токе возбуждения генератора
(соответствующем номинальному
напряжению). При указанных выше значениях
Xd*
и Xq*
для неявнополюсных машин ОКЗ = 0,5 ÷ 1,0,
а для явнополюсных 0,8 ÷ 1,8. Следовательно,
установившийся ток короткого замыкания
в синхронных машинах сравнительно
невелик (в некоторых машинах он меньше
номинального), так как при этом режиме
ψк
≈ 0, и поле якоря сильно размагничивает
машину. Очевидно, что при коротком
замыкании результирующий магнитный
поток Фрез.к
<< Фв
и ЭДС Е
<< Е0.
Величина ОКЗ имеет большое значение
для эксплуатации: она показывает
кратность тока к. з. и определяет значение
мощности, которой можно нагрузить
синхронный генератор. Следовательно,
целесообразнее иметь машину с большим
ОКЗ, однако это требует выполнения ее
с большим воздушным зазором, что
существенно удорожает машину.
Xd*=(Iаном
/Uном
)Xd
; Xq*
= (Iаном
/Uном
)Xq
, где Iаном
и Uном
— номинальные значения фазных тока и
напряжения. В современных синхронных
явнополюсных машинах средней и большой
мощности Xd*
= 0,6 ÷ 1,6, а Xq*
= 0,4 ÷ 1. Сопротивление Xd*
определяется в основном реакцией якоря,
так как относительная величина
индуктивного сопротивления, обусловленного
потоком рассеяния, мала (Xσa*
= 0,1 ÷ 0,2). В неявнополюсных машинах
средней и большой мощности обычно
сопротивление Хсн*
= 0,9 ÷ 2,4. Сопротивления, выраженные в
относительных единицах, характеризуют
параметры машины, показывая относительную
(относительно номинального напряжения)
величину падения напряжения при
номинальном токе. Кроме того, эти
величины позволяют сравнивать свойства
генераторов различной мощности. Иногда
в паспорте машины указывают величину,
обратную Xd*
, называемую отношением короткого
замыкания:ОКЗ
= 1/Xd*
= Uном
/(Iaном
Xd
). Это
отношение характеризует значение
установившегося тока к. з.
Iк.ном
= ОКЗ*Iном
, который возникает при номинальном
токе возбуждения генератора
(соответствующем номинальному
напряжению). При указанных выше значениях
Xd*
и Xq*
для неявнополюсных машин ОКЗ = 0,5 ÷ 1,0,
а для явнополюсных 0,8 ÷ 1,8. Следовательно,
установившийся ток короткого замыкания
в синхронных машинах сравнительно
невелик (в некоторых машинах он меньше
номинального), так как при этом режиме
ψк
≈ 0, и поле якоря сильно размагничивает
машину. Очевидно, что при коротком
замыкании результирующий магнитный
поток Фрез.к
<< Фв
и ЭДС Е
<< Е0.
Величина ОКЗ имеет большое значение
для эксплуатации: она показывает
кратность тока к. з. и определяет значение
мощности, которой можно нагрузить
синхронный генератор. Следовательно,
целесообразнее иметь машину с большим
ОКЗ, однако это требует выполнения ее
с большим воздушным зазором, что
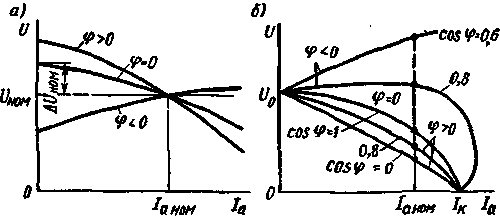
существенно удорожает машину.При переходе от режима хх к режиму номинальной нагрузки изменение напряжения характеризуется величиной (%) ΔU = [(U0 - Uном )/Uном ]100.
E0·cosφ0=U·cosφ+Rв·I => U= (E0·cosφ0 - Rв·I) / cosφ
Н
 ачинают
с того, что откладывают в пространстве
первый вектор, относительно которого
будет происходить построение — вектор
напряжения. Его величина в масштабе
будет равна номинальному напряжению
генератора, а вот угол может быть любой.
Для удобства зададим его так, чтобы
вектор смотрел вертикально вверх. Зная
его положение, можно изобразить ток
статора. Типично он отстает от вектора
напряжения на угол и в масштабе
также будет равен номинальному току
машины. Далее всю векторную диаграмму
построим на основе следующей, уже нам
известной, формулы. Она говорит о том,
что если к вектору напряжения прибавить
падение напряжения на внутреннем
сопротивлении генератора xd,
то можно получить вектор э.д.с. Eq.
Построение выполняют так. Падение
напряжения будет перпендикулярно току
генератора, оператор j
при сопротивлении xd
повернет его на 90 градусов против
часовой стрелки. По этой причине через
конец вектора напряжения проводят
линию, перпендикулярную вектору тока
генератора, и к концу вектора напряжения
по этой линии откладывают величину,
равную произведению xd
на I.
Вектор, соединяющий начало координат
и конец вектора падения напряжения,
окажется э.д.с. Eq.
То, что эта э.д.с. имеет индекс q,
означает, что она лежит на оси q машины.
Пользуясь этим знанием, можно обозначить
оси q d,
а следовательно, и определить ориентацию
ротора генератора в пространстве.
Переходная э.д.с. машины E’
лежит за сопротивлением x’d,
а значит, используя те же соображения,
можно отложить ее вектор на диаграмме.
Проекция вектора E’ на ось q дает
вектор E’q.
Сверхпереходная э.д.с. машины E’’
лежит за сопротивлением x’’d.
Его проекция на ось q даст E’’q.
Следует отметить, что векторную диаграмму
можно построить, например, выбрав за
исходный вектор напряжение системы.
Тогда все сопротивления в расчетах
необходимо увеличить на величину
внешнего сопротивления (Xвн).
ачинают
с того, что откладывают в пространстве
первый вектор, относительно которого
будет происходить построение — вектор
напряжения. Его величина в масштабе
будет равна номинальному напряжению
генератора, а вот угол может быть любой.
Для удобства зададим его так, чтобы
вектор смотрел вертикально вверх. Зная
его положение, можно изобразить ток
статора. Типично он отстает от вектора
напряжения на угол и в масштабе
также будет равен номинальному току
машины. Далее всю векторную диаграмму
построим на основе следующей, уже нам
известной, формулы. Она говорит о том,
что если к вектору напряжения прибавить
падение напряжения на внутреннем
сопротивлении генератора xd,
то можно получить вектор э.д.с. Eq.
Построение выполняют так. Падение
напряжения будет перпендикулярно току
генератора, оператор j
при сопротивлении xd
повернет его на 90 градусов против
часовой стрелки. По этой причине через
конец вектора напряжения проводят
линию, перпендикулярную вектору тока
генератора, и к концу вектора напряжения
по этой линии откладывают величину,
равную произведению xd
на I.
Вектор, соединяющий начало координат
и конец вектора падения напряжения,
окажется э.д.с. Eq.
То, что эта э.д.с. имеет индекс q,
означает, что она лежит на оси q машины.
Пользуясь этим знанием, можно обозначить
оси q d,
а следовательно, и определить ориентацию
ротора генератора в пространстве.
Переходная э.д.с. машины E’
лежит за сопротивлением x’d,
а значит, используя те же соображения,
можно отложить ее вектор на диаграмме.
Проекция вектора E’ на ось q дает
вектор E’q.
Сверхпереходная э.д.с. машины E’’
лежит за сопротивлением x’’d.
Его проекция на ось q даст E’’q.
Следует отметить, что векторную диаграмму
можно построить, например, выбрав за
исходный вектор напряжение системы.
Тогда все сопротивления в расчетах
необходимо увеличить на величину
внешнего сопротивления (Xвн).
В неявнополюсных синхронных машинах воздушный зазор имеет одинаковую ширину. Магнитное сопротивление для продольного и поперечного потоков реакции статора в таких машинах также одинаково, поэтому продольное и поперечное синхронные индуктивные сопротивления равны (xd ~xq). Явнополюсная синхронная машина обладает различными индуктивными сопротивлениями для продольной и поперечной составляющих тока.
Р азличие
в индуктивных сопротивлениях xd
и хq
объясняется неодинаковым воздушным
зазором по длине окружности расточки
статора, что при одинаковой магнитодвижущей
силе реакции статора вызывает различные
магнитные потоки реакции. Магнитные
сопротивления явнополюсных машин в
поперечном направлении больше, чем в
продольном, следовательно, поперечное
синхронное индуктивное сопротивление
оказывается меньше продольного (дело
в том, что электрическое реактивное
сопротивление статора машины во многом
определяется взаимным влиянием ротора
и статора. При этом влияние ротора
приводит к увеличению реактивного
сопротивления статора. Но чем выше
магнитное сопротивление на пути
протекания магнитных потоков, тем меньше
это влияние и тем ниже сопротивление и
наоборот.) При построении векторной
диаграммы поступают следующим образом:
вместо действительной машины рассматривают
фиктивную машину с одинаковыми
индуктивными сопротивлениями в продольной
и поперечной осях. Но эти сопротивления
и э.д.с. берут такими, чтобы активная и
реактивная мощности машины при одном
и том же напряжении на ее выводах и угле
получились такими же, как и у
действительной машины. Эти условия
приблизительно удовлетворяются, если
искать э.д.с. машины за сопротивлением
xq.
Э.д.с. такой фиктивной машины обозначают
вектором ЕQ,
который будет расположен на поперечной
оси q.
Таким образом, введя фиктивную, замещают
явнополюсную машину эквивалентной ей
машиной и далее строят диаграмму обычным
образом.Реальная э.д.с. синхронного
явнополюсного генератора E
за сопротивлением xd
не будет лежать на оси q.
Ее
проекции на оси дадут Eq
и Ed
машины, причем последнюю вызывает
несимметрия ротора генератора.
азличие
в индуктивных сопротивлениях xd
и хq
объясняется неодинаковым воздушным
зазором по длине окружности расточки
статора, что при одинаковой магнитодвижущей
силе реакции статора вызывает различные
магнитные потоки реакции. Магнитные
сопротивления явнополюсных машин в
поперечном направлении больше, чем в
продольном, следовательно, поперечное
синхронное индуктивное сопротивление
оказывается меньше продольного (дело
в том, что электрическое реактивное
сопротивление статора машины во многом
определяется взаимным влиянием ротора
и статора. При этом влияние ротора
приводит к увеличению реактивного
сопротивления статора. Но чем выше
магнитное сопротивление на пути
протекания магнитных потоков, тем меньше
это влияние и тем ниже сопротивление и
наоборот.) При построении векторной
диаграммы поступают следующим образом:
вместо действительной машины рассматривают
фиктивную машину с одинаковыми
индуктивными сопротивлениями в продольной
и поперечной осях. Но эти сопротивления
и э.д.с. берут такими, чтобы активная и
реактивная мощности машины при одном
и том же напряжении на ее выводах и угле
получились такими же, как и у
действительной машины. Эти условия
приблизительно удовлетворяются, если
искать э.д.с. машины за сопротивлением
xq.
Э.д.с. такой фиктивной машины обозначают
вектором ЕQ,
который будет расположен на поперечной
оси q.
Таким образом, введя фиктивную, замещают
явнополюсную машину эквивалентной ей
машиной и далее строят диаграмму обычным
образом.Реальная э.д.с. синхронного
явнополюсного генератора E
за сопротивлением xd
не будет лежать на оси q.
Ее
проекции на оси дадут Eq
и Ed
машины, причем последнюю вызывает
несимметрия ротора генератора.
С помощью диаграммы Потье.
Включение генератора на параллельную работу с сетью. В рассматриваемом режиме необходимо обеспечить возможно меньший бросок тока в момент присоединения генератора к сети. В противном случае возможны срабатывание защиты поломка генератора или первичного двигателя. Ток в момент подключения генератора к сети будет равен нулю, если удастся обеспечить равенство мгновенных значений напряжений сети uс и генератора иг
Ucm sin (ωct - αс ) = Uгm sin (ωг - αг ). На практике выполнение этого условия сводится к выполнению трех равенств: значений напряжений сети и генератора Ucm = Uгm или Uc = Uг ; частот ωc = ωг или fс = fг ; их начальных фаз αс = αг (совпадение по фазе векторов Úc и Úг). Кроме того, для трехфазных генераторов нужно согласовать порядок чередования фаз. Совокупность операций, проводимых при подключении генератора к сети, называют синхронизацией. Практически при синхронизации генератора сначала устанавливают номинальную частоту вращения ротора, что обеспечивает приближенное равенство частот fс ≈ fг а затем, регулируя ток возбуждения, добиваются равенства напряжения Uc = Uг . Совпадение по фазе векторов напряжений сети и генератора (αс = αг) контролируется специальными приборами — ламповым и стрелочными синхроноскопами.
Ламповые синхроноскопы применяют для синхронизации генераторов малой мощности, поэтому обычно их используют в лабораторной практике. Этот прибор представляет собой три лампы, включенные между фазами генератора и сети (рис. 6.32, а). На каждую лампу действует напряжение Δu = uс — uг , которое при fс ≠ fг изменяется с частотой Δf = fc - fг , называемой частотой биений (рис. 6.32,б). В этом случае лампы мигают. При fс ≈ fг разность Δи изменяется медленно, вследствие чего лампы постепенно загораются и погасают. Обычно генератор подключают к сети в тот момент, когда разность напряжений Δu на короткое время становится близкой нулю, т. е. в середине периода погасания ламп. В этом случае выполняется условие совпадения по фазе векторов Úc и Úг . Для более точного определения этого момента часто применяют нулевой вольтметр, имеющий растянутую шкалу в области нуля. После включения генератора в сеть дальнейшая синхронизация частоты его вращения, т. е. обеспечение условия n2 = n1 , происходит автоматически. Генераторы большой мощности синхронизируют с помощью стрелочных синхроноскопов, работающих по принципу вращающегося магнитного поля. В этих приборах при fс ≠ fг стрелка вращается с частотой, пропорциональной разности. частот fс - fг , в одну или другую сторону в зависимости от того, какая из этих частот больше. При fс = fг стрелка устанавливается на нуль; в этот момент и следует подключать генератор к сети. На электрических станциях обычно используют автоматические приборы для синхронизации генераторов без участия обслуживающего персонала.
Довольно часто применяют метод самосинхронизации, при котором генератор подключают к сети при отсутствии возбуждения (обмотка возбуждения замыкается на активное сопротивление). При этом ротор разгоняют до частоты вращения, близкой к синхронной (допускается скольжение до 2%), за счет вращающего момента первичного двигателя и асинхронного момента, обусловленного индуцированием тока в демпферной обмотке. После этого в обмотку возбуждения подают постоянный ток, что приводит к втягиванию ротора в синхронизм. При методе самосинхронизации в момент включения генератора возникает сравнительно большой бросок тока, который не должен превышать 3,5Ia ном .
Включение генератора в сеть может сопровождаться толчками уравнительного тока и активной мощности на вал генератора, а также более или менее длительными качаниями. Указанные нежелательные явления возникают вследствие того, что частота вращения включаемого генератора отличается от синхронной частоты вращения генераторов энергосистемы, а напряжение на выводах возбужденного генератора — от напряжения на шинах электростанции. Поэтому для включения синхронного генератора на параллельную работу с другими работающими генераторами электростанции или энергосистемы его предварительно нужно синхронизировать. Синхронизацией называется процесс уравнивания частоты вращения и напряжения включаемого генератора с частотой вращения работающих генераторов и напряжением на электростанции, а также выбор соответствующего момента времени для подачи импульса на включение выключателя генератора.
При проектировании явнополюсных синхронных машин стремятся, чтобы кривая распределения поля возбуждения в воздушном зазоре приближалась к синусоиде (для этого воздушный зазор выполняют неравномерным), однако получить идеальное распределение не удается. Поэтому наряду с первой гармонической имеется и ряд высших гармонических. Форма распределения магнитного поля и коэффициент kв зависят от коэффициента αi = bр /τ и формы воздушного зазора, т. е. от отношений δmax /δ и δ/τ . Обычно αi =0,65 ÷ 0,75; δmax /δ = 1 ÷ 2,5 и δ/τ = 0,01 ÷ 0,05. При этих условиях kв = 0,90 ÷ 1,2. Коэффициент магнитного потока kФ также зависит от формы распределения магнитного поля и представляет собой отношение площадей, ограниченных рассматриваемыми кривыми. При указанных выше значениях bр /τ, δmax /δ и δ/τ коэффициент kФ = 0,92 ÷ 1,08. Напряжение, индуцированное в обмотке якоря при холостом ходе, должно быть практически синусоидальным. Согласно ГОСТу напряжение считается практически синусоидальным, если разность между ординатой действительной кривой напряжения и ординатой синусоиды в одной и той же точке для генератора мощностью до 1 MB• А не превышает 10%, а для генератора свыше 1 MB • А — 5 % от амплитуды основной синусоиды. Чтобы получить кривую напряжения, близкую к синусоидальной, желательно иметь в машине приблизительно синусоидальное распределение магнитного поля. Для этого в неявнополюсных машинах обмотку возбуждения распределяют так, чтобы были уменьшены амплитуды МДС высших гармонических (см. гл. 3). В явнополюсных машинах это достигается путем увеличения зазора под краями полюсных наконечников. Обмотку якоря выполняют распределенной (q = 4 ÷ 6) с укороченным шагом (у ≈ 0,8τ). Чтобы исключить третьи гармонические токи и уменьшить потери мощности в машине, обмотку якоря в трехфазных генераторах соединяют по схеме Y. При этом отсутствуют третьи гармонические в линейных напряжениях. Подавление третьих гармонических в кривой фазного напряжения путем укорочения шага обмотки нерационально, так как при у = 0,66τ существенно уменьшается первая гармоническая. Указанные меры позволяют получить на выходе машины практически синусоидальную ЭДС, поэтому при дальнейшем рассмотрении теории синхронной машины можно учитывать поток только первой гармонической магнитного поля и соответствующую гармоническую ЭДС. Поток первой гармонической магнитного поля возбуждения Фв называют потоком возбуждения, потоком взаимоиндукции. Магнитное поле возбуждения. Магнитное поле, созданное обмоткой возбуждения, характеризуется рядом коэффициентов, посредством которых реальное распределение индукции в в
 оздушном
зазоре приводится к синусоидальному.
К числу этих коэффициентов относятся:
коэффициент формы кривой поля возбуждения
kв
= Bвm1/Bвm
- отношение амплитуды первой гармонической
Bвm1
индукции поля возбуждения в воздушном
зазоре к амплитуде Bвm
действительного распределения этой
индукции; коэффициент потока возбуждения
kФ
= Ф/Фв
— отношение потока Ф, созданного
обмоткой возбуждения в воздушном
зазоре, к потоку первой гармонической
Фв
этого поля (потоку взаимной индукции).
На рис. 6.18, а,
б показано
распределение магнитного поля возбуждения
в воздушном зазоре в пределах одного
полюсного деления для неявнополюсной
машины. На одно полюсное деление ротора
приходится значительное число пазов
(20—40), поэтому можно принять, что
распределение индукции в воздушном
зазоре вдоль окружности якоря (сплошная
линия) имеет трапецеидальный характер.
При таком распределении коэффициенты
kв
и kФ
зависят только от относительной длины
γ обмотанной части полюсного деления
ротора τ, т. е. от коэффициента полюсного
перекрытия αi
=Bв.ср/Bвm
= 1 - 0,5γ. При этом коэффициент формы
кривой поля возбужденияkв
= Bвm1
/Bвm
= 8 sin(πγ/2)/(π2γ),а
коэффициент потока возбуждения kФ
= Ф/Фв
= π (1 - γ/2)/(2kв
).
оздушном
зазоре приводится к синусоидальному.
К числу этих коэффициентов относятся:
коэффициент формы кривой поля возбуждения
kв
= Bвm1/Bвm
- отношение амплитуды первой гармонической
Bвm1
индукции поля возбуждения в воздушном
зазоре к амплитуде Bвm
действительного распределения этой
индукции; коэффициент потока возбуждения
kФ
= Ф/Фв
— отношение потока Ф, созданного
обмоткой возбуждения в воздушном
зазоре, к потоку первой гармонической
Фв
этого поля (потоку взаимной индукции).
На рис. 6.18, а,
б показано
распределение магнитного поля возбуждения
в воздушном зазоре в пределах одного
полюсного деления для неявнополюсной
машины. На одно полюсное деление ротора
приходится значительное число пазов
(20—40), поэтому можно принять, что
распределение индукции в воздушном
зазоре вдоль окружности якоря (сплошная
линия) имеет трапецеидальный характер.
При таком распределении коэффициенты
kв
и kФ
зависят только от относительной длины
γ обмотанной части полюсного деления
ротора τ, т. е. от коэффициента полюсного
перекрытия αi
=Bв.ср/Bвm
= 1 - 0,5γ. При этом коэффициент формы
кривой поля возбужденияkв
= Bвm1
/Bвm
= 8 sin(πγ/2)/(π2γ),а
коэффициент потока возбуждения kФ
= Ф/Фв
= π (1 - γ/2)/(2kв
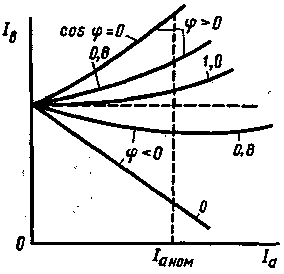
).Для определения в каком режиме работает синхронный генератор недовозбужденный режим(Iв < Iв.гр), режим полного возбуждения(Iв = Iв.гр), перевозбужденный режим
(Iв > Iв.гр).
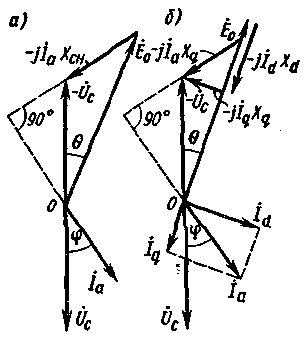
П
 остроение
векторных диаграмм по формулам -
Úс
= É0
- jÍа
Xсн
; -Úc
= É0
- jÍd
Xd
- jÍq
Xq
. рекомендуется
начинать с изображения векторов Úc
и - Úc
. Затем строится вектор тока Íа
, активная составляющая которого
совпадает с направле нием вектора Úc
, и определяется вектор É0
. При построении диаграммы для явнополюсной
машины нужно также сначала определить
направление вектора É0
, прибавив к - Úc
вспомогательный вектор jÍа
Xq
.
остроение
векторных диаграмм по формулам -
Úс
= É0
- jÍа
Xсн
; -Úc
= É0
- jÍd
Xd
- jÍq
Xq
. рекомендуется
начинать с изображения векторов Úc
и - Úc
. Затем строится вектор тока Íа
, активная составляющая которого
совпадает с направле нием вектора Úc
, и определяется вектор É0
. При построении диаграммы для явнополюсной
машины нужно также сначала определить
направление вектора É0
, прибавив к - Úc
вспомогательный вектор jÍа
Xq
.
|
|
Он потребляет из системы реактивную мощность.
|
Если демпферная обмотка расположена по всей окружности якоря, то Хобр = Х2 ≈ Х"d ≈ Х"q . Сопротивления для токов обратной последовательности можно получить экспериментально, если включить синхронную машину в сеть и вращать ротор с синхронной частотой против направления вращения поля. Токи двойной частоты, возникающие в демпферных обмотках и массивном роторе, вызывают дополнительные потери, из-за которых может возникнуть опасный нагрев ротора и снижение КПД машины. Увеличение сечения стержней демпферной обмотки для снижения активного сопротивления и потерь не всегда дает положительный эффект, так как при двойной частоте сильно проявляется эффект вытеснения тока. Взаимодействие МДС возбуждения ротора и потока обратной последовательности статора создает знакопеременный колебательный момент, вызывающий вибрацию машины и шум. Система токов нулевой последовательности IА0, IB0, IС0 создает во всех трех фазах МДС, совпадающие по времени, так как ÍА0 = ÍB0 =ÍС0 . При этом для основной гармонической магнитный поток в воздушном зазоре от токов нулевой последовательности равен нулю. Вследствие этого токи нулевой последовательности могут создавать только потоки рассеяния Фσ0 и пульсирующие потоки гармонических, кратных трем. При диаметральной обмотке якоря потоки рассеяния токов нулевой последовательности замыкаются так же, как потоки рассеяния для токов прямой последовательности, а поэтому приблизительно равны и соответствующие индуктивные сопротивления Х0 = Хσа . При укорочении шага обмотки индуктивное сопротивление уменьшается и достигает минимума при шаге обмотки, равном 2/3 полюсного деления, так как в этом случае во всех пазах проводники нижнего и верхнего слоев принадлежат разным фазам. Следовательно, при у = (2/3)τ полный ток нулевой последовательности каждого из пазов равен нулю, а индуктивное сопротивление определяется потоком лобовых частей. При рекомендуемом для синхронных машин шаге у ≈ 0,8τ индуктивное сопротивление Х0 уменьшается почти в три раза по сравнению с его значением при диаметральной обмотке. Таким образом, обычно 0,3Хσа < Х0 < Хσа . Экспериментально величину Х0 можно определить, если включить все фазы обмотки якоря последовательно и присоединить их к источнику однофазного переменного тока. Обмотку возбуждения при этом нужно замкнуть накоротко» а ротор привести во вращение с номинальной частотой. При этом U = 3I0Х0, откуда Х0 = U/(3I0). Наличие короткозамкнутой обмотки возбуждения на роторе уменьшает дифференциальный поток рассеяния, а вращение ротора выравнивает фазные сопротивления, которые при неподвижном роторе оказались бы различными из-за различия в положении проводников отдельных фаз относительно оси обмотки возбуждения. Если на роторе имеется мощная демпферная обмотка, то обмотка возбуждения оказывает незначительное влияние на величину Х0, т. е. ее можно не замыкать накоротко и не приводить во вращение.
Несимметричные установившиеся короткие замыкания. Простейшим примером несимметричной нагрузки является однофазное короткое замыкание. Этот режим кроме методического имеет и большое практическое значение, так как его результаты можно использовать при определении токов аварийного короткого замыкания. При однофазном коротком замыкании ÍA = Íк ; ÍВ = ÍС = 0 ; ÚA = 0 . Из условия (2.106) для этого режима получаем ÍА1 = ÍА2 = ÍА0 = ÍА/3 . Следовательно, в данном случае во всех трех фазах возникают токи прямой, обратной и нулевой последовательностей, хотя и имеются условия ÍВ1 + ÍВ2 + ÍВ0 = ÍВ = 0 и ÍC1 + ÍC2 + ÍC0 = ÍC = 0. Вращающийся магнитный поток возбуждения индуцирует во всех фазах ЭДС только прямой последовательности É1 = É0. Пренебрегая активными сопротивлениями, для фазы АХ ÚА = ÉА - jÍА1Xпp - jÍА2X2 - jÍА0X0 = 0 или с учетом ÉА = jÍА(Хпр + Х2 + Х0 )/3, Откуда установившийся ток однофазного короткого замыкания
Iк1 = IA = |
3E0 |
(Xпр + X2 + X0 ) |
Сравнивая со значением установившегося тока трехфазного короткого замыкания Iкз = Е0 /Хсн , получаем, что Iк1 > Iкз , так как Хпр = Хсн ; Х2 < Хсн и Х0 < Хсн. Напряжения для фаз BY и CZ определим из таких уравнений: ÚB = ÉB - ÍВ1Хпр - ÍВ2Х2 -ÍВ0Х0 ; ÚC = ÉC - jÍC1Хпр - jÍC2Х2 - jÍC0Х0.
Внезапное (аварийное) короткое замыкание. При одно- и двухфазном внезапных коротких замыканиях ток больше, чем при трехфазном аварийном коротком замыкании, в соответствии с тем, что при установившемся режиме ток при двух- и однофазном коротких замыканиях больше, чем при трехфазном. В случае аварийных несимметричных коротких замыканий, так же как при трехфазном коротком замыкании, возникают апериодическая и периодическая составляющие тока. Начальное действующее значение периодической составляющей тока I'уст.max можно определять по формулам выше, подставляя вместо Xпp величину Х"d или Х'd. При этом индуктивные сопротивления Х2 и Х0 остаются практически одинаковыми как для установившихся, так и для переходных режимов. В остальном определение тока короткого замыкания при несимметричных режимах производится так же, как и при трехфазном коротком замыкании.
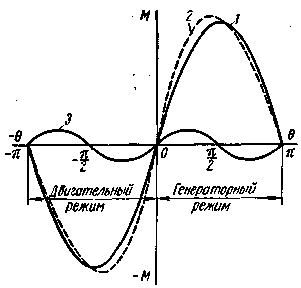
Одним из преимуществ синхронных двигателей по сравнению с асинхронными является то, что они обладают большей перегрузочной способностью. Весьма важно, что перегрузочная способность синхронных двигателей может быть увеличена за счет автоматического регулирования тока возбуждения, в то время как у асинхронных двигателей такой возможности нет Максимальный момент, который в состоянии развивать двигатель, наступает при θ = 90°:
Mmax = |
3UE0 |
. |
ωхс |
Если момент сопротивления Мс окажется больше момента Мmax, то двигатель не в состоянии будет его уравновесить и остановится.
Отношение Мmax/Мном называется перегрузочной способностью двигателя и для различных двигателей лежит в пределах 2 — 3,2.
Перегрузочная способность может быть при необходимости увеличена за счет повышения ЭДС Е0. Из выражения максимального момента следует, что последний и, следовательно, перегрузочная способность синхронного двигателя пропорциональны первой степени напряжения в отличие от асинхронного двигателя, у которого она пропорциональна квадрату напряжения. Из этого следует, что синхронные двигатели менее чувствительны к изменению напряжения, чем асинхронные.
Для разгона синхронного двигателя используют так называемый асинхронный пуск синхронного двигателя. С этой целью ротор снабжают кроме обмотки возбуждения 1 (рис. 11.15, а) пусковой обмоткой. Последняя состоит из стержней 2, уложенных в пазы полюсных наконечников и замыкаемых с торцевых сторон накоротко сегментами 3. Пусковая обмотка подобна короткозамкнутой обмотке ротора асинхронного двигателя.
Р
 еактивным
двигателем называют
синхронный двигатель с явнополюсным
ротором без обмотки возбуждения и
постоянных магнитов, у которого магнитный
поток создается реактивным током,
проходящим по обмотке статора. Вращающий
момент в таком двигателе возникает
из-за различия магнитных проводимостей
по продольной и поперечной осям. При
этом явновыраженные полюсы ротора
стремятся ориентироваться относительно
поля так, чтобы магнитное сопротивление
для силовых линий поля было минимальным.
Вследствие этого появляются тангенциальные
силы fт
(рис. 7.5), образующие вращающий момент,
и ротор вращается в том же направлении
и с той же частотой вращения n1
, что и поле статора. Обмотка статора в
двигателях общего применения
распределенная, трех- или двухфазная
с конденсатором в одной из фаз; она
создает вращающееся магнитное поле.
Ротор двигателя может иметь различные
конструктивные исполнения. На рис.
7.6,а
приведено наиболее простое устройство
ротора; его собирают из стальных листов
аналогично роторам асинхронных
двигателей; листы имеют впадины,
обеспечивающие различные индуктивные
сопротивления по осям d
и q.
Для пуска в ход двигателя на роторе
предусмотрена короткозамкнутая обмотка
типа «беличья клетка». Однако двигатели
с роторами этой конструкции имеют
низкие технико-экономические показатели.
Более высокие показатели получены при
использовании современных
усовершенствованных конструкций ротора
(рис. 7.6,б
и в),
в которых пазы или вырубки в листах
заливают алюминием. Реактивные двигатели
с роторами новой конструкции имеют
приблизительно такие же технико-экономические
показатели, как и другие типы синхронных
и асинхронных микродвигателей. Схема
возникновения реактивного момента.
еактивным
двигателем называют
синхронный двигатель с явнополюсным
ротором без обмотки возбуждения и
постоянных магнитов, у которого магнитный
поток создается реактивным током,
проходящим по обмотке статора. Вращающий
момент в таком двигателе возникает
из-за различия магнитных проводимостей
по продольной и поперечной осям. При
этом явновыраженные полюсы ротора
стремятся ориентироваться относительно
поля так, чтобы магнитное сопротивление
для силовых линий поля было минимальным.
Вследствие этого появляются тангенциальные
силы fт
(рис. 7.5), образующие вращающий момент,
и ротор вращается в том же направлении
и с той же частотой вращения n1
, что и поле статора. Обмотка статора в
двигателях общего применения
распределенная, трех- или двухфазная
с конденсатором в одной из фаз; она
создает вращающееся магнитное поле.
Ротор двигателя может иметь различные
конструктивные исполнения. На рис.
7.6,а
приведено наиболее простое устройство
ротора; его собирают из стальных листов
аналогично роторам асинхронных
двигателей; листы имеют впадины,
обеспечивающие различные индуктивные
сопротивления по осям d
и q.
Для пуска в ход двигателя на роторе
предусмотрена короткозамкнутая обмотка
типа «беличья клетка». Однако двигатели
с роторами этой конструкции имеют
низкие технико-экономические показатели.
Более высокие показатели получены при
использовании современных
усовершенствованных конструкций ротора
(рис. 7.6,б
и в),
в которых пазы или вырубки в листах
заливают алюминием. Реактивные двигатели
с роторами новой конструкции имеют
приблизительно такие же технико-экономические
показатели, как и другие типы синхронных
и асинхронных микродвигателей. Схема
возникновения реактивного момента.Рассмотрим трехфазное короткое замыкание явнополюсного синхронного генератора, работавшего предварительно в режиме холостого хода. Ток якоря iк при переходном процессе имеет периодическую и апериодическую составляющие: Можно предположить, что закон изменения тока якоря подобен изменению тока трансформатора при коротком замыкании. Однако более подробный анализ показывает, что процесс короткого замыкания в синхронном генераторе значительно сложнее, чем в трансформаторе. При коротком замыкании генератора с течением времени постепенно уменьшается амплитуда периодической составляющей тока генератора, в итоге она становится равной амплитуде установившегося тока короткого замыкания: В первом полупериоде амплитуда периодической составляющей в 5 - 8 раз превышает величину Iкm . Это обусловлено тем, что в начальный момент процесса короткого замыкания ЭДС синхронного генератора близка к ЭДС холостого хода Е0 и только через 0,6—1,5 с становится равной É = É0 + Éа = É0 - jÍк Xd . Быстрому уменьшению ЭДС Е и потока Фрез препятствует появление переходного тока в обмотке возбуждения вследствие того, что в ней индуцируется ЭДС eв = -wв dФрез /dt. Переходный ток в обмотке возбуждения имеет максимум в начальный период короткого замыкания и постепенно затухает, уменьшаясь до установившегося значения тока, предшествующего короткому замыканию. В соответствии с этим снижаются поток Фрез и амплитуда периодической составляющей тока короткого замыкания. Наибольшее значение этой амплитуды где X'd — продольное переходное индуктивное сопротивление обмотки якоря; обычно значение его в относительных единицах X'd* = 0,2 ÷ 0,5. Поскольку амплитуда периодической составляющей тока короткого замыкания постепенно затухает, приближаясь к установившемуся значению Iкт , и индуктивное сопротивление синхронной машины значительно больше активного, т. е. угол φк = arctg (Xк /Rк ) ≈ π/2, то периодическая составляющая
Переходная постоянная времени Т'd = 0,4 ÷ 3,0 с, определяющая затухание тока iк.п , зависит не только от параметров обмотки якоря, но и главным образом от параметров обмотки возбуждения. Если машина имеет демпферную обмотку, то в ней также возникает переходный ток, замедляющий уменьшение результирующего потока. При этом амплитуда тока к. з. больше, чем при отсутствии демпферной обмотки
I' уст m = Ет /Х"d , |
где X"q — поперечное сверхпереходное индуктивное сопротивление обмотки якоря; Та = (Х"d + X''q)/(ωRa ) — постоянная времени апериодического тока якоря. При наличии демпферной обмотки X"q обычно мало отличается от Х"d и тогда iк.а = - (Em /Х"d ) cos α0 e-t/Ta. Значение тока к. з. максимально в той фазе, где α0 = 0 (примерно через полпериода после начала короткого замыкания); это значение называют ударным током. Поскольку постоянные времени Т"d и Тd малы, некоторое затухание все же происходит. Значение ударного тока не должно превышать амплитуду номинального тока якоря более чем в 15 раз. Так как значения X"d и Х'd сравнительно малы, то для ограничений ударного тока в цепь якоря иногда ставят специальный реактор.
При коротком замыкании синхронного генератора возникает также знакопеременный момент на валу ротора, который образуется в результате взаимодействия неизменного по направлению магнитного поля, создаваемого апериодической составляющей тока якоря с МДС возбуждения. В наиболее неблагоприятных случаях мгновенные значения этого момента достигают 10-кратного значения по сравнению с номинальным значением, что необходимо учитывать при механических расчетах деталей машины и надежности ее крепления к фундаменту.
Успокоительной (или демпферной) обмоткой называется короткозамкнутая обмотка, помещенная на роторе. В явнополюсной машине успокоительная обмотка обычно выполняется в виде стержней, заложенных в пазы полюсных наконечников и соединенных на торцовых сторонах пластинами. Если пластины с торцовых сторон соединяют стержни лишь в пределах полюсной дуги, то получается продольная успокоительная обмотка (рис. 4-45). Если пластины при этом соединяются в кольца, размещенные вдоль всей окружности ротора, то получается продольно-поперечная обмотка. При наличии успокоительной обмотки продольно пульсирующая н.с. будет уравновешиваться главным образом токами в этой обмотке. Тем самым обмотка возбуждения почти совершенно освобождается от токов двойной частоты. При наличии короткозамкнутых контуров по поперечной оси будет также ослабляться действие поперечно пульсирующей н.с. Успокоительная обмотка должна иметь небольшие активное и индуктивное сопротивления — только в этом случае ее действие будет достаточно эффективным. Современные турбогенераторы отечественных заводов не имеют на роторе особых успокоительных обмоток. Здесь роль успокоительной обмотки выполняют контуры вихревых, токов, наведенных обратным полем в массивном роторе Они оказывают сильное заглушающее действие.
Наиболее опасны для синхронной машины внутренние несимметричные короткие замыкания, когда часть витков обмотки замыкается на корпус или происходит замыкание части витков двух фаз обмотки между собой. Внутренние несимметричные короткое замыкания приводят обычно к пожару обмотки и стали и тяжёлой аварии в синхронной машине.
8
 3.
Электрические потери в обмотке
возбуждения. Магнитные потери.
Механические потери. Электрические
потери в щеточном контакте. Электрические
потери в обмотке якоря. Мощность,
потребляемая двигателем из сети,
определяется по формуле Р1
= √3 U1I1cos
φ1.
Часть этой мощности теряется
в обмотке статора: ΔРобм1
= 3 I12r1,
а часть,
ΔРст1,
составляет потери в сердечнике статора
от перемагничивания и вихревых токов.
Мощность, передаваемая вращающимся
магнитным полем ротору, называется
электромагнитной мощностью и составляет
Рэм
= P1
- ΔРобм1
- ΔРст1
= 3Е2кI2
cos ψ2.
Часть
электромагнитной мощности теряется в
обмотке ротора:
ΔРобм2
= 3 I22r2,
а часть,
ΔРст2,
составляет потери в сердечнике ротора
от гистерезиса и перемагничивания.
Мощность, преобразуемая в механическую,
равна
Рмех
= Рэм
- ΔРобм2
- ΔРст2.
Небольшая
часть механической мощности теряется
на тре-ние в подшипниках ротора о воздух
и вентиляцию. Мощность, развиваемая
двигателем на валу,
Рв
= Рмех
- ΔРмех
.
Все
потери мощности, кроме вентиляционных,
которые представляют собой затраты
мощности на продувание воздуха внутри
двигателя с целью лучшего охлаждения,
превращаются в теплоту и нагревают
двигатель.
3.
Электрические потери в обмотке
возбуждения. Магнитные потери.
Механические потери. Электрические
потери в щеточном контакте. Электрические
потери в обмотке якоря. Мощность,
потребляемая двигателем из сети,
определяется по формуле Р1
= √3 U1I1cos
φ1.
Часть этой мощности теряется
в обмотке статора: ΔРобм1
= 3 I12r1,
а часть,
ΔРст1,
составляет потери в сердечнике статора
от перемагничивания и вихревых токов.
Мощность, передаваемая вращающимся
магнитным полем ротору, называется
электромагнитной мощностью и составляет
Рэм
= P1
- ΔРобм1
- ΔРст1
= 3Е2кI2
cos ψ2.
Часть
электромагнитной мощности теряется в
обмотке ротора:
ΔРобм2
= 3 I22r2,
а часть,
ΔРст2,
составляет потери в сердечнике ротора
от гистерезиса и перемагничивания.
Мощность, преобразуемая в механическую,
равна
Рмех
= Рэм
- ΔРобм2
- ΔРст2.
Небольшая
часть механической мощности теряется
на тре-ние в подшипниках ротора о воздух
и вентиляцию. Мощность, развиваемая
двигателем на валу,
Рв
= Рмех
- ΔРмех
.
Все
потери мощности, кроме вентиляционных,
которые представляют собой затраты
мощности на продувание воздуха внутри
двигателя с целью лучшего охлаждения,
превращаются в теплоту и нагревают
двигатель.
84. кпд
=
 Коэффициент полезного действия (к.п.д.)
синхронной машины определяется:
Коэффициент полезного действия (к.п.д.)
синхронной машины определяется:
для генератора по
формуле![]() ;
для двигателя по формуле
;
для двигателя по формуле![]()
Значения к.п.д. (η) синхронных генераторов и двигателей при номинальном режиме их работы в зависимости от номинальной мощности Рн. В СГ преобразование механической энергии в электрическую сопровождается потерями энергии. К синхронному генератору со стороны вала подведена механическая мощность P1. В роторе и статоре имеются следующие потери: 1) потери на возбуждение; Rв - сопротивление цепи возбуждения.
2) - механические потери, вызванные всеми видами трения; 3) - потери магнитные в сердечнике статора (перемагничивание и вихревые токи);Эта электромагнитная мощность передается на статор. 4) - потери в обмотке статора. P2 - полезная мощность, отдаваемая в сеть.
Потери , , - постоянные (не зависят от нагрузки) и составляют потери холостого хода ХХ синхронного генератора, где - сумма всех потерь в СГ.
Из этой формулы следует, что КПД зависит от cos. КПД СГ зависит не только от мощности нагрузки, но и от коэффициента мощности cos.
КПД СГ достигает 98-99 %.