

Автоматизированные системы управления дорожным движением
Автомобильные магистрали и внегородские автомобильные дороги общего пользования отличаются от улиц в городе, главным образом, топологически. Речь идет о линейных объектах с одним входом и одним выходом, и управление движением на них подчиняется несколько другим правилам, отличным от правил управления движением в транспортных сетях. Ввиду того, что здесь транспортные средства движутся с гораздо большей скоростью, применяются и системы повышения безопасности водителей, заключающиеся, например, в своевременном определении опасности. В системах управления движением на автомагистралях также используют подсистему, которая увеличивает пропускную способность дорог при одновременном повышении безопасности участников движения. Последнее основано на мониторинге транспортного потока и на применении управляемых дорожных знаков, которые изменяют характеристики движения транспортного потока.
Системы повышения безопасности на автомобильных дорогах
Пилотные проекты, направленные на поддержку систем безопасности для водителей, реализованные, главным образом, в Японии, показывают, что, используя телематическую технику, названную «Системы автоматического управления движением транспортных средств на автомагистралях» (Automated Cruise-Assist Highway Systems — AHS), можно существенно снизить количество происшествий и при этом повысить комфортабельность поездки для пассажиров. Это, no-существу, две системы, отличающиеся друг от друга местом сосредоточения процесса принятия решений.
Интеллектуальное транспортное средство. Интеллектуальное транспортное средство оснащено так, что оно может фиксировать состояние проезжей части дороги (скользкая, обледенение, снег) и установить скорость движения в соответствии с этими условиями. Кроме того, оно оснащено системой автоматического соблюдения траектории движения и автоматического обгона, а также формирования транспортных средств в виртуальные поезда. Другие датчики способны днем и ночью находить препятствия на дороге, как, например, стоящее транспортное средство или пешеход, переходящий дорогу на опасном расстоянии.
Транспортное средство оснащено также устройством связи с вышестоящим центром управления движением. Кроме приема информации от этого центра, оно передает информацию о скорости, состоянии проезжей части дороги и пр., которые используются для оптимизации режима движения в целом на сети дорог.
Интеллектуальная автомагистраль. В этом случае нагрузку, связанную со сбором информации и передачей её водителю, берет на себя, в основном, инфраструктура, созданная вдоль дорог. Разумеется, что в таком случае не надо оборудовать каждый автомобиль комплексной техникой, но, несмотря на это, сохраняется возможность хотя бы однонаправленной связи с автомобилем, например, с помощью RDS-TMC или с помощью информирующих дисплеев.
Автомагистраль в этом случае покрыта телекоммуникационный средой, которая дает возможность собирать метеорологические, транспортные и другие данные в любой части автомагистрали и после их обработки в центре передавать их водителям в форме текущей информации или в форме приказов управляемых дорожных знаков и информационных дисплеев. Телекоммуникационная среда может быть беспроволочной или может быть образована сетями LAN или WAN.
Для действующей системы AHS необходимо создать необходимую инфраструктуру и осуществить следующие мероприятия:
1. Мониторинг состояния проезжей части дороги (физических условий), мониторинг состояния транспортного потока и возможных препятствий (заторы, дорожно-транспортные происшествия).
2. Обработка информации в центре управления движением.
3. Передача информации водителю: в индивидуальном порядке в автомобиль или всему транспортному потоку.
4. Исполнение мероприятия: автоматические системы в транспортном средстве (AHS-a) или вручную посредством водителя (AHS-m).
Информация о нестандартных условиях движения передается водителю из вышестоящего транспортного центра управления. Информацию получают путем измерения (интенсивность, скорость, образование гололеда, вода на проезжей части дороги, расстояние видимости) или с помощью видеонаблюдения. Все растущее значение приобретает и речевая информация, такая как сообщения милиции, сервисных организаций или сообщения других водителей. В транспортном центре информации обрабатываются и передаются водителю посредством информационной системы в автомобиле, системам связи, например, с помощью системы DSRC или RDS-TMC. Для всего транспортного потока используются информационные табло и управляемые дорожные знаки.
Детектирование препятствий движению и неблагоприятных погодно-климатических условий
Основой системы AHS является получение достоверной транспортной информации, информации о погодно-климатических условиях и о препятствиях Движению в пределах всей контролируемой дорожной сети.
Погодно-климатические условия
В критических точках транспортной сети расположены датчики для измерения физических величин на дороге. Речь идет о сложных устройствах для измерения ряда физических величин: температуры поверхности проезжей части дороги и внутренних слоев дорожной одежды, температуры воздуха, осадков, температуры образования росы, солнечного излучения и других величин. Эти данные предварительно обрабатываются и передаются в местный центр управления движением, где они автоматически оцениваются. Большинство современных измерительных устройств способно прогнозировать обледенение за несколько часов. Кроме того, что водитель получает информацию о состоянии дороги (влажное покрытие проезжей части, обледенение), или о метеоусловиях, данная информация используется также центрами управления дорог, которые могут заблаговременно принять необходимые меры по уходу за дорогами.
Относительно простым и, следовательно, более дешевым являются устройства измерения метеоусловий, которые, как правило, измеряют температуру, вид и количество осадков, а также видимость. Эти устройства также должны быть соединены с местными центрами управления движением.
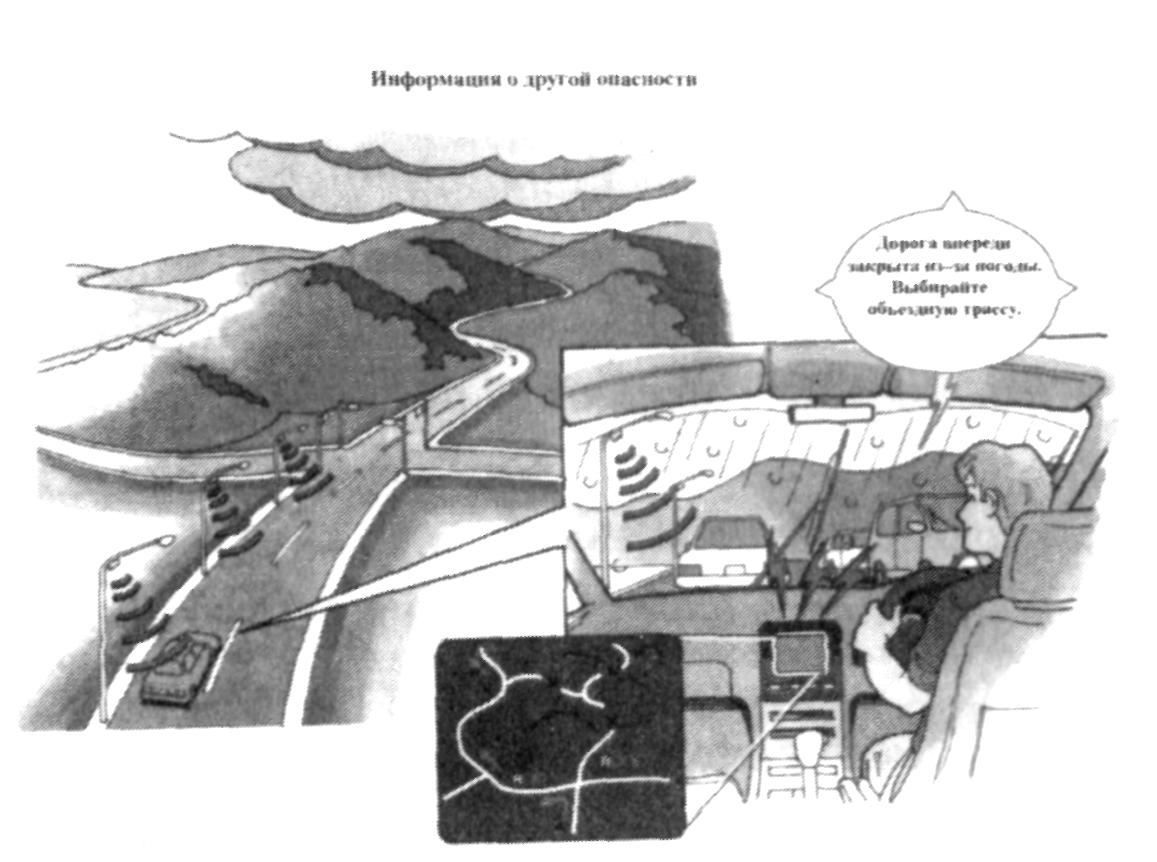
На рисунке показан пример оборудования дороги датчиками для измерения метеорологических условий и передатчиками DSRC с малой дальностью действия, которые в данном случае установлены на столбах освещения и которые передают на дисплей в автомобиле информацию о погодных условиях по направлению движения и предлагают объездной маршрут. На дисплее указано, что на первом перекрестке необходимо повернуть налево.
Препятствия на дороге
Неожиданные препятствия на дороге и в ее непосредственной близости являются причиной большого количества дорожно-транспортных происшествий. Основная причина заключается в том, что водитель не способен полностью сосредоточить свое внимание на управлении автомобилем и замечает препятствие в самый последний момент, когда он уже не может остановить автомобиль или осуществить соответствующий маневр.
Кроме препятствий, которые представляют собой стоящие транспортные средства, идентификация которых описана ниже, речь идет об «изолированных» препятствиях типа постороннего предмета на дороге (потерянный груз) или стоящее транспортное средство на проезжей части или в ее непосредственной близости. Препятствием является также пролитое масло или другие вещества.
Ввиду того, что осуществлять мониторинг каждого метра дороги технически невозможно, информация получается в большинстве случаев с помощью мобильных телефонов от проезжающих водителей, работников сервисных организаций и спасательных служб. Для обеспечения функции такого вида системы необходимо разработать организационную и рабочую схему, которая возлагает ответственность и решает взаимоотношения оперативных подразделений и диспетчерских центров.
Составной частью интеллектуальной автомагистрали являются и пункты SOS, которые обеспечивают быструю и прямую связь участника движения с диспетчером, который ему поможет решить сложную ситуацию. И в случае этого вида связи выгодно использовать цифровую ( и, следовательно, неискаженную) форму передачи.
Удачным техническим решением является также использование мониторинга CCTV. Современные камеры могут полностью автоматически отслеживать большие участки дорог с возможностью поворачиваться и увеличения масштаба изображения. Некоторые более современные системы, кроме того, способны автоматически определить и идентифицировать посторонний предмет, находящийся на дороге.
На рисунке показана ситуация, когда водитель получает информацию о том, что на проезжей части дороги стоит транспортное средство, которое, кроме того, невидимо в тумане.

Неблагоприятные состояния транспортных потоков
В принципе различают два вида неблагоприятных состояний транспортного потока: в первую очередь речь идет об образовании заторов, которые в большинстве случаев не образуются внезапно, транспортный поток переходит в это состояние постепенно. Во втором случае речь идет о дорожно-транспортном происшествии, которое происходит мгновенно и к тому же на дороге, на которой может отсутствовать движение автомобилей. В результате различия ситуации средства обнаружения этих двух явлений различны.
Важно, чтобы дорога была оборудована соответствующими детекторами транспорта, которыми являются индуктивные петли или другие типы стационарных детекторов, например, детекторы инфракрасного света и видеодетекторы. Для обеспечения более точной и быстрой идентификации транспортных ситуаций измеряются два параметра: интенсивность и скорость (занятость). Интеллектуальные автомагистрали в Японии и в Голландии оборудованы детекторами с шагом приблизительно 500 м.
Совершенно очевидно, и результаты исследований, проводимых в рамках PIARC/ С5, подтверждают, что не в силах обслуживающего диспетчерского персонала справиться с таким количеством информации как в виде цифровых данных (интенсивность, скорость), так и в виде изображений на мониторах наблюдения CCTV. Для обнаружения неблагоприятных транспортных ситуаций необходимо использовать аппарат автоматической идентификации происшествий и заторов. Он основан на математической многоразмерной модели, причем оценивается отклонение поведения транспортного потока от поведения этой модели. Само собой разумеется, что период прогноза поведения транспортного потока должен быть менее 15 минут.
Исключение сна водителей за рулем
Исследования, проводимые университетом в Регенсбурге, подтвердили, что сон водителей является причиной почти 50% происшествий водителей фургонов на европейских автомагистралях. Поэтому идентификация такой ситуации и устранение ее причин являются одним из направлений практического приложения транспортной телематики.
Существует несколько методов идентификации сна. Один из них основан на использовании миниатюрной камеры на приборной доске, которая следит за глазами водителя. С помощью методов цифровой обработки сигнала DSP (Digital Signal Processing) оценивается ряд параметров и наблюдается состояние дремоты. Этот метод развивается, главным образом, в Японии.
Следующий разрабатываемый и экспериментально проверяемый факультетом транспорта Чешского политехнического института (FD HVUT) метод заключается в наблюдении и анализе электроэнцефалографических (EEG) сигналов водителя при одновременном наблюдении способа держания и изменения угла поворота рулевого колеса и измерении кожно-гальванической реакции (KFP). Целью работ является разработка устройства, которое будет с большой вероятностью идентифицировать приближение сна и подходящим способом «разбудит» водителя.
Автоматическая идентификация происшествий и заторов
Автоматическая идентификация дорожно-транспортных происшествий важна для лиц, причастных к происшествиям тем, что можно быстро вызвать спасательную команду и организовать спасательные мероприятия. Она также очень важна и для остальных участников дорожного движения, которые могли бы въехать в область опасности. Для ограничения этой опасности необходимо происшествие вовремя идентифицировать и информировать водителей, подъезжающих к месту происшествия.
Не менее важным с точки зрения безопасности является своевременное обнаружение заторов. Однако в данном случае появляется дополнительный фактор, заключающийся в том, что заторы можно предупредить или хотя бы их ограничить высшими формами регулирования транспортного потока. Проблематикой дорожно-транспортных происшествий занимается и Европейский Союз, который опубликовал документ «Towards Fair and Efficient Pricing in Transport» — Зеленую книгу в которой приводятся данные о потерях общества в результате чрезвычайных ситуаций на дорогах. Отмечается, что потери от заторов составляют 2,5 %, от ДТП — 1,5 % и от загрязнения окружающего воздуха выхлопными газами — 0,6 % от валового национального продукта, что представляет собой общую сумму в размере около 250 млрд. евро. Поэтому Европейский Союз и конкретно дирекция DGUI поддерживают проекты, которые должны способствовать идентификации этих явлений. На автомагистрали Е17 в Бельгии между городами Тент и Антверпен реализован пилотный проект AVS-TDC (Advancer Video Surveillance-Time to Destination Calculation), где с помощью 15 видеокамер контролируется шестиполосная автомагистраль протяженностью около 8 км с тремя въездами и четырьмя съездами. Целью проекта является проверка надежности и скорости алгоритмов идентификации транспортных ситуаций.
Все больше возможностей предоставляют средства видеодетектирования, так как алгоритмы для остановки транспортного средства введены в собственное устройство (Tracking Track).
Системы повышения равномерности и безопасности колонного движения автомобилей
Транспортные заторы являются причиной потерь, которые в мировом масштабе составляют миллиарды долларов. Речь идет не только об экономических потерях, вызванных неравномерным движением, но и о потерах человеческих жизней. Нельзя не учитывать увеличение стрессового состояния водителей при таком состоянии транспортного потока. Равномерность движения оказывает прямое положительное действие на экологию и психический комфорт водителя.
Наибольшие проблемы заторов наблюдаются на подъездных дорогах к городам, въездах на автомагистрали, в местах оплаты за проезд на автомагистрали и при въездах в тоннели и на мосты, если здесь понижена допустимая скорость или уменьшено количество полос Движения. Считается, что 75 % заторов вызвано именно этими обстоятельствами. Используя телематические средства, можно увеличить пропускную способность дороги и значительно уменьшить количество дорожно-транспортных происшествий.
Основной метод управления движением на автомагистралях заключается в использовании систем линейного управления RLTC (Road Line Traffic Control), которые успешно применяются, например, в Германии и Голландии. К другим методам, способствующим повышению безопасности и плавности движения, относится система Ramp Metering, т. е. система «впуска» транспортных средств со въезда в главный поток транспорта на дороге. В США для улучшения степени использования дорог в пригородных зонах используются системы HOV (High Occupancy Vehicles), описанные ниже.
Система линейного управления - RLTC
Линейное управление движением транспортных потоков основано на сборе и обработке данных о режиме движения транспортных потоков (интенсивность и состав транспортного потока) на более длинном участке дороги и регулирование скорости с помощью управляемых дорожных знаков типа В20а «Ограничение максимальной скорости» и с помощью знака В22а «Обгон грузовым автомобилям запрещен». Система дополнена и предупреждающими дорожными знаками «Прочие опасности», «Дорожные работы» и т. п. Типичный пример такого решения в Германии можно видеть на рисунке, где показаны порталы с управляемыми знаками, ограничивающими скорость, установленными над обеими направлениями движения шестиполосной автомагистрали. В качестве вспомогательной информации на стойке портала имеется знак А28, указывающий на причину ограничения скорости, т. е. данном случае наличие колонн транспортных средств.

Основные цели системы RLTC
При повышении плотности транспортного потока возникает неустойчивый режим движения, который проявляется в виде так называемых пульсирующих волн «Stop and Go». Эти волны характеризуются большими изменениями скорости и, тем самым, большим среднеквадратичным отклонением скорости.
На 6-ом километре участка автомагистрали А10 у Берлина был осуществлен подробный анализ происшествий. На данном участке проходит в обоих направлениях около 140 000 авт/сут. Из анализа происшествий вытекает, что 80 % происшествий происходит непосредственно во время движения, а остальная часть — при въезде на магистраль или при выезде из нее. 40 % от общего количества происшествий во время движения происходит при появлении пульсирующей волны «Stop and GO».
Первая цель линейного управления: Первой и самой важной целью является гармонизация и стабилизация транспортного потока, в результате чего заметно повышается первичная безопасность. На рисунке дан пример двух состояний транспортного потока, представленных кривой нормального распределения с различными дисперсиями и одинаковым средним значением скорости движения. В то время, как кривая f(x1) отражает стабилизированный транспортный поток с малой дисперсией величин скоростей, кривая f(x2) показывает, что транспортные средства проезжают очень быстро (относительно среднего значения), а также очень медленно.

Вторая цель линейного управления: Стабилизация транспортного потока основана на ограничении скорости движения транспортных средств. В результате низкой скорости движения уменьшается дистанция между автомобилями и значительно возрастает пропускная способность дороги. Она является максимальной при скорости в пределах 70-80 км/ч. Ниже приводятся данные повышения пропускной способности дороги, достигающие значения около 15 %.
Третья цель линейного управления: Первичное увеличение безопасности достигается за счет гармонизации транспортного потока. Кроме того, возрастает и так называемая вторичная безопасность благодаря использованию управляемых знаков, информирующих водителей о потенциальной опасности. В подавляющем большинстве случаев используются предупреждающие знаки А22 «Прочие опасности» с дополнительными таблицами, знак А15 «Дорожные работы» и знак А28 «Колонное движение».
Решение аппаратными средствами
Внешняя конфигурация данных систем является относительно установившейся существенное отличие заключается только в программном обеспечении.
На рисунке показана типичная конфигурация системы, которая образована детекторами транспорта и исполнительными элементами. В данном случае исполнительными элементами являются управляемые дорожные знаки (УДЗ), расположенные у дороги, которые переключены в режим информирования водителей о наличии колонн, возникших в результате выполнения дорожных работ. Справедлив принцип, что знаки УДЗ располагаются возле дороги только в том случае, если имеется одна или, в крайнем случае, две полосы. Во всех остальных случаях знаки располагаются над проезжей частью дороги на порталах.

Рекомендуемый шаг отдельных сечений S1–Sn составляет 800-1000 м и не должен быть более 1500 м. Существует опасность того, что водитель «забудет» о приказе знака. Кроме того, каждое сечение дополнено измерительными сечениями D1–Dn в которых измеряются по крайней мере три параметра: интенсивность движения, скорость транспортных средств и состав транспортного потока. Сечения измерений предусмотрены на каждой полосе и удалены от УДЗ на 150-200 м в направлении движения. Период выполнения измерений зависит от способа обработки результатов замеров и не должен превышать 5 мин.
Конфигурация знаков на портале показана на рисунке. Типичным является то, что знаки типа В20, ограничивающие скорость, расположены над осью каждой отдельной полосы, в то время, как в местах над линиями разметки проезжей части, выделяющих полосы движения, установлены предупреждающие знаки, дополненные в большинстве случаев дополнительными табличками с запрещающими знаками.

В большинстве случаев используются знаки, работающие по принципу волоконной оптики, менее часто — знаки со светодиодами. Преимущество волоконных знаков заключается в том, что в негативном исполнении цветов они обеспечивают действительно белый цвет наряду с повышенной светоотдачей. Условием реализации системы является высокая надежность свечения УДЗ. Поэтому волоконные знаки в обязательном порядке дополнены и резервной лампой накаливания, которая автоматически включается при отказе главной лампы накаливания. Информация о таком состоянии может быть передана в центр управления, которая ее пересылает в вышестоящий центр. Знаки, оборудованные светодиодами, обладают большим сроком службы. Несмотря на это, они выпускаются в сегментном исполнении, которое обеспечивает, в крайнем случае, выход из строя одного сегмента. Светоотдача нормально регулируется в зависимости от внешних условий, чтобы избежать ослепления водителя (эффект «огненного шара») в темное время суток.
На рисунке показана типичная комбинация всех символов. Видно, что на левой и центральной полосах скорость ограничивается по ступеням 120 - 100 - 80, в то время, как на правой полосе, которая используется, главным образом, грузовыми автомобилями, скорость регулируется по ступеням 60 - 50 - 40.

Кроме того, для целей регулирования транспортного потока здесь использованы знаки В21а «Обгон легковым автомобилям запрещен» и В22а «Обгон грузовым автомобилям запрещен», которые установлены над линиями разметки проезжей части, выделяющих полосы движения. Кроме предупреждающих знаков «Прочие опасности», «Сужение дороги», «Дорожные работы», «Скользкая дорога», «Обледенение» и «Колонна», в данном случае использованы и оптические сигналы для движения по полосам типа S5a/S5b/S5c.
Система управления
Ввиду линейного решения, занимающего относительно длинные участки, У каждого сечения предусмотрен блок управления типа свободно программируемого автомата, который управляет УДЗ и осуществляет предварительную обработку данных. Кроме прочего, он имеет все функции мониторинга, начиная с обнаружения проникновения постороннего лица в шкаф и кончая контролем выполнения всех функций и контролем отдельных функциональных узлов, как например, управляемые Дорожные знаки, детекторы, системы питания и т. п.
Все блоки управления соединены с местным (региональным) центром управления, который автономно управляет линейным участком. В этом центре управления используются алгоритмы управления. Для обеспечения необходимой быстрой реакции системы нужна и быстродействующая связь между отдельными сечениями и центром Управления. Этот региональный центр, как правило, соединен с вышестоящим центром Управления, где обеспечена и связь с другими телематическими системами. Здесь имеется и интерфейс для оператора, который может в обоснованных случаях управлять системой RLTC и вручную. Этот режим обычно используется в случае дорожно-транспортного.
Работа системы основана на обработке и оценке данных от детекторов транспорта. Следует иметь в виду, что обрабатываются крупные массивы данных. Например, в случае трех полос движения в одном направлении и десяти сечений, в которых проводятся измерения с периодом 10 с, через каждые 15 минут получается измерение 2700 параметров транспортного потока, на основании которых необходимо рассчитать двух - или многоразмерную транспортную модель. Двухразмерная модель, как правило, основана на значениях интенсивности движения и скорости. На этой основе можно классифицировать транспортный поток и находить случаи его неустойчивости.
Алгоритмы управления должны в определенных пределах уметь дополнять данные, которые отсутствуют в результате кратковременных отказов или помех. Потом алгоритмы в центре управления на основании оцененной транспортной ситуации изменяют символы управляемых дорожных знаков. Современные алгоритмы работают с учетом изменения скорости
Используемая до сих пор логика все чаще заменяется нечеткой логикой управления. Причина заключается в том, что мы имеем дело со случайными величинами, и твердая логика решений не отражает хорошо характер транспортного процесса. В алгоритмы управления можно ввести и метеорологические условия, что повысит качество управления. Условия принятия решений выгодно записывать в качестве лингвистических правил при использовании для этого вербального переменного. Форма записи может быть в таком случае следующей:
Если средняя скорость >130 и одновременно дисперсия >20 то понизить скорость на 20
Если > 20 % груз. авт. и одновременно средняя скорость на центр, полосе около. 90 то включить знак В22а
Если идет дождь и одновременно средняя скорость >130 то включить В20 на «90»
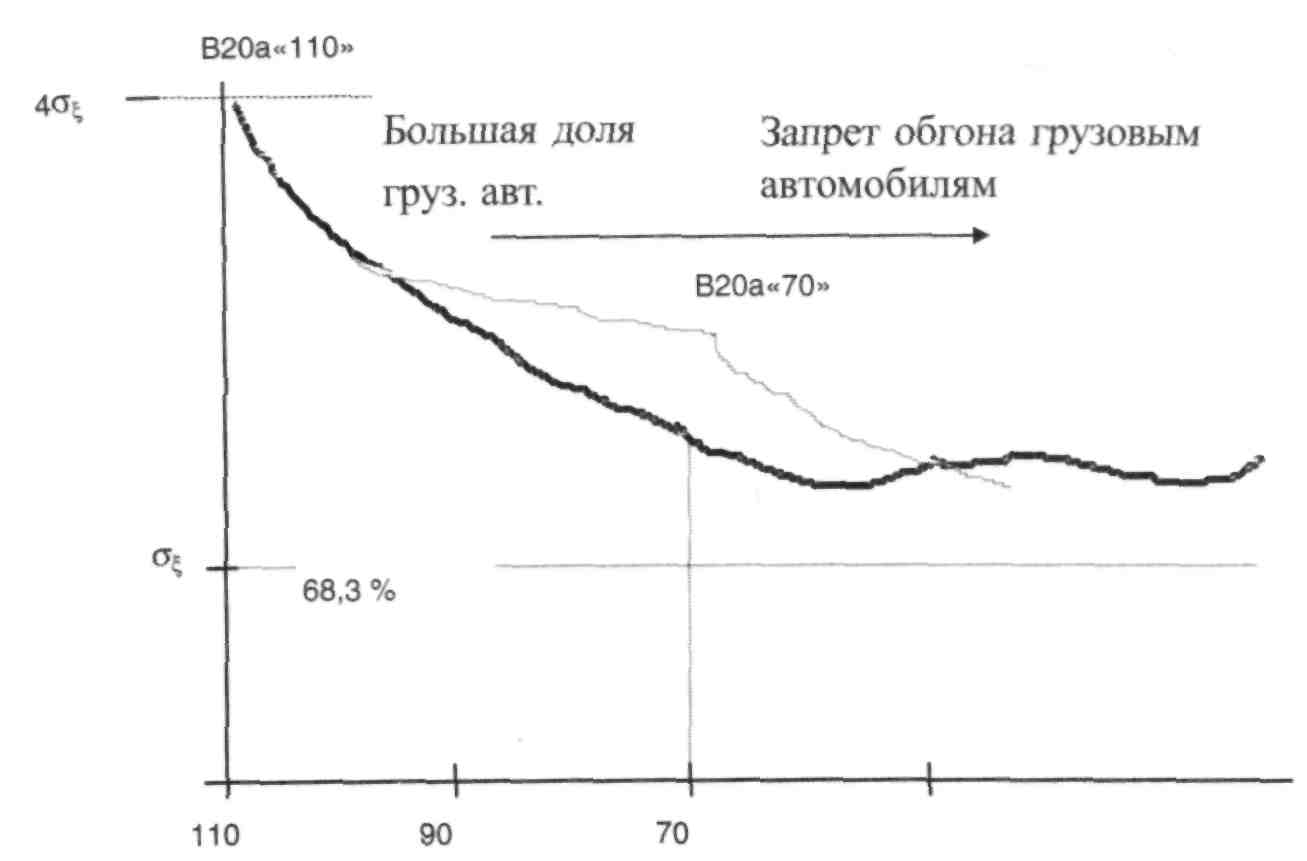
Задачей системы управления является путем снижения скорости по интервалу 20 км/ч и одноразовым запретом обгона грузовым автомобилям стабилизировать поток и уменьшить дисперсию до приемлемого значения. Пример результата процесса регулирования показан на рис. 5.13. Перед активацией УДЗ среднее значение скорости превышает 110 км/ч и дисперсия скорости также большая. После включения знака В20а «110» среднее значение скорости уменьшается, но значение дисперсии продолжает оставаться большим. Это вызвано относительно большой долей медленно движущихся транспортных средств, которые обгоняют по полосам, допускающих более высокую скорость. Поэтому в определенный момент времени включен знак «Обгон грузовым автомобилям запрещен». Ввиду того, что пропускная способность дороги все еще недостаточна, включается и знак В20а «70». После этого вмешательства среднее значение скорости и ее дисперсия уменьшились и автомобили движутся в максимально «замкнутой колонне».
Оценка эффективности управления транспортными потоками
Проекты линейного управления после реализации подвергаются анализу, так как необходимо оценить экономические результаты этих капиталовложений. Изучается вклад в сохранение окружающей среды, а также экономический результат и вклад область повышения безопасности на транспорте. Относительно подробное ^следование эффективности RLTC было осуществлено в период 1992 - 1993 гг. на автомагистрали А9 Мюнхен - Нюрнберг. Длина испытываемого участка составляла 45 км. Кроме линейного управления, на пересекающих автомагистралях и А99 (внешнее кольцо) были установлены управляемые дорожные знаки, направляющие транспортный поток на объездные дороги. транспортная нагрузка автомагистрали А9 больше, чем нагрузка остальных автомагистралей в Баварии. У городка Ехинг, расположенного приблизительно в 12 км от Франкфуртер Ринг на север, были измерены и абсолютно максимальные значения интенсивности в интервале 24 часов. В пятницу 25 сентября 1992 г. нагрузка представляла собой 144 634 авт/сут.
Анализ дорожно-транспортных происшествий осуществлялся в следующие периоды времени:
с 9.4.1991 г. по 8.4.1992 г. без RLTC
с 9.4.1992 г. по 8.4.1993 г. с RLTC
Были учтены все дорожно-транспортные происшествия, которые были официально зарегистрированы полицией. Количество происшествий после установки системы линейного управления уменьшилось на 13,5 %. Однако существенным при этом является количество погибших, которое уменьшилось на 38 %. Это означает, что только за один год работы системы линейного управления на этом участке длиной 45 км количество погибших было меньше на 81 человек. Это вызвано тем, что для достижения устойчивого транспортного потока скорость снижается.
Система линейного управления, дополненная управляемыми дорожными знаками на подъездах, оказывает влияние на снижение количества колонн и пачек автомобилей, что способствует собственно увеличению пропускной способности дороги. Причиной является своевременная регистрация образования колонн и их локализация на автомагистрали и равномерный подъезд транспортных средств, благодаря использованию управляемых дорожных знаков, которые снижают скорость и информируют о наличии колонн на автомагистрали с других направлений. Перед пуском RLTC в эксплуатацию в часы пик образовывались колонны в направлении к Мюнхену протяженностью от 6 до 9 км и в направлении к Нюрнбергу — протяженностью до 5 км.
Сокращение протяженности колонн показано на рисунке, колонны длиннее 4 км появляются менее, чем в 8 % случаев.

Кроме сокращения размера колонн положительно воспринимается стабилизация и гармонизация транспортного потока в результате снижения скорости. Практически исключены волны «Stop and Go». Измерения показывают, что активация управляемых дорожных знаков, ограничивающих максимальную скорость, действительно приводит к уменьшению скорости и одновременно снижается дисперсия скорости, так как большинство водителей едут со скоростью, близкой к постоянной. Из рисунка, который показывает результаты измерений на автомагистрали А2 у Вены, видно, что до активации системы среднее значение скорости находилось в пределах 70-115 км/ч и дисперсия составляла от 7 до более чем 22 км/ч. После включения знаков, ограничивающих скорость до 80 км/ч, среднее значение скорости уменьшилось до 75-85 км/ч и дисперсия понизилась до 7-15 км/ч.

Исследования в Германии показывают, что соблюдение водителями вводимого ограничения скорости зависит и от предупреждающих дорожных знаков, которые обращают внимание водителя на вид опасности. Знак «Осторожно, прочие опасности» с дополнительной таблицей «Туман» соблюдается в значительно меньшей степени, чем дополнительная таблица «Гололед». Также было установлено, что водители на правой или центральной полосе приспосабливают свою скорость к требованиям управляемых знаков. Хуже обстоит дело на левой полосе, где дисперсия скорости гораздо больше и степень соблюдения указаний на знаке ниже. На этой проблеме сосредотачивает свое внимание германская полиция.
Полиция положительно оценивает возможность регулировать транспорт в случае происшествий и вручную при использовании специальных программ по происшествиям. Такую же возможность регулирования движения имеет управление дорогами при ограничениях, вызванных строительными работами. В течение наблюдаемого периода от 9.4.1992 г. до 8.4.1993 г. на изучаемом участке магистрали А9 ручное управление использовалось в течение 163 дней, в том числе в течение 73 дней было использовано 127 местных режимов регулирования из-за строительных ограничений и в течение 110 дней — режимов регулирования, вызванных дорожно-транспортными происшествиями.
Кроме автоматического режима работы транспортной системы оцениваются и метеорологические условия, а именно: влажность поверхности дороги и снижение видимости в случае тумана. Если измеряется количество воды на проезжей части дороги, снижающей безопасность движения, то включается знак А8 «Скользкая дорога» при одновременном понижении скорости. Таким же образом в случае тумана включается знак А22 «Прочие опасности» с дополнительной таблицей «Туман». В течение 182 дней наблюдения количество дней, в которых знаки включались, составило 138 дней. Причины включения знаков:
туман 63 дня
влажность 117 дней
обледенение 8 дней
Обледенение или температура воздуха, дороги и остаточное содержание соли измеряются в восьми точках данного участка дороги. Из результатов измерения рассчитывается вероятность возникновения обледенения даже с опережением на 3 часа. Таким образом, дорожной администрации предоставляется возможность реагировать на сложившуюся ситуацию.
Управление въездом на автомагистраль
При определенных транспортных условиях, если транспортный поток находится на пределе устойчивости, то даже небольшое вмешательство является достаточным, чтобы вызвать образование колонны или возникновение цепного столкновения. Этим вмешательством могут быть автомобили, которые с риском въезжают на автомагистраль с примыкающих дорог и заставляют водителей на автомагистрали снижать скорость или изменять направление движения. В данном случае образуются ударные волны со всеми последствиями.
Для работы системы «Ramp Metering» (RM) необходимо измерять характеристики движения транспортных потоков с достаточным опережением перед въездной рампой. Расстояние до точки измерения зависит от допустимой скорости, но оно не должно быть меньше значения 1000 -1500 м. Опять речь идет об измерении трех характеристик движения на каждой полосе: интенсивности, скорости и состава транспортного потока. Транспортная модель постоянно оценивает степень нагрузки и прогнозирует состояние транспортного потока на автомагистрали перед соответствующим въездом. Система управления с помощью светофора «дозирует» количество транспортных средств, подъезжающих по примыкающей дороге. Фактическая длительность зеленого сигнала определена текущим и прогнозируемым состоянием транспортного потока на автомагистрали.
Предоставление приоритета транспортным средствам с пассажирами
Система High Occupancy Vehicles (HOV) используется, главным образом, в США и Японии. Принцип заключается в предоставлении выделенной полосы автомобилям, в которых имеется несколько пассажиров. Как правило, речь идет о количестве, превышающем два человека. Это решение косвенно и психологически содействует лучшему использованию транспортных средств. Кроме того, обычно с помощью телематических средств изменяется направление движения в зависимости от текущих требований. Утром, как правило, имеет приоритет транспортный поток, въезжающий в город, а в часы пик во второй половине дня — транспортный поток, выезжающий из города.
Условием такого решения является наличие дороги с пятью или большим количеством полос движения. С помощью управляемых дорожных знаков и шлагбаумов в утренние часы пик средняя полоса (полосы) имеет направление в город, причем ее могут использовать только автомобили с двумя или большим количеством пассажиров. Честность водителей проверяется автоматической видеосистемой, способной прочитать и номерной знак. В вечерние часы пик направление выделенной полосы изменяется в обратном направлении.