

Билет № 11
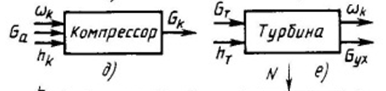
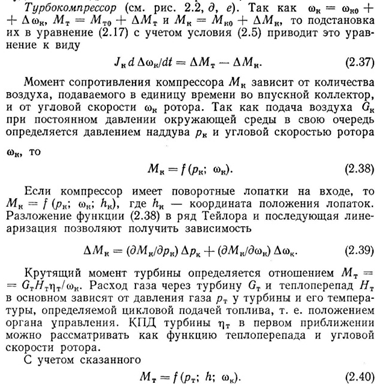
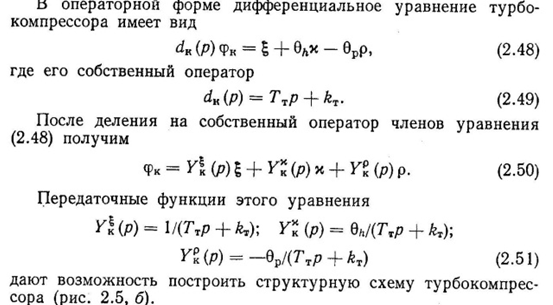
Дифференциальное управление турбокомпрессором.
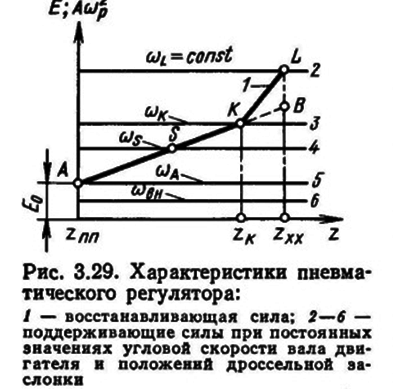
2. Восстанавливающая и поддерживающая сила.
В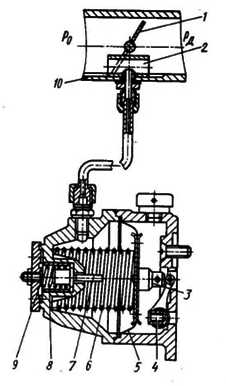 осстанавливающая
сила Е в пневматических регуляторах
создается усилием пружины 6, приведенным
к оси движения муфты, поэтому Е=Е0+bz,
где Е-усилие предварительной деформации,
b-
жесткость, z-
координата положения муфты.
осстанавливающая
сила Е в пневматических регуляторах
создается усилием пружины 6, приведенным
к оси движения муфты, поэтому Е=Е0+bz,
где Е-усилие предварительной деформации,
b-
жесткость, z-
координата положения муфты.
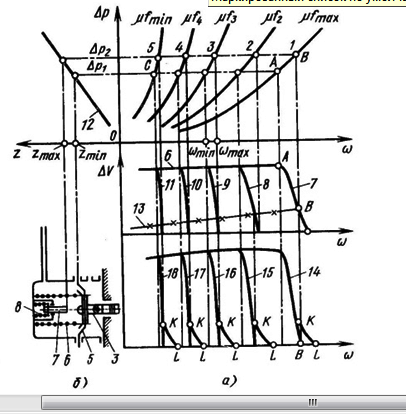
Предварительная деформация пружины 6 сохраняется неизменной для всех регулируемых скоростных режимов, поэтому характеристика Е=f(z) представляет собой прямую АВ на рисунке. На режимах, близких к холостому ходу, регуляторные характеристики 14-18 слишком приближаются к вертикали, что снижает устойчивость работы системы регулирования. Для исправления этого положения в регуляторах вводится дополнительная пружина 8, устанавливаемая без дополнительной деформации. В точке К при zк диафрагма 5 соприкасается с упором 7 и следовательно, с пружиной 8, и в дальнейшем пружины 6 и 8 деформируются совместно(участок KL характеристики 1). Это уменьшает наклон регуляторной характеристики на данных режимах (KL) что обеспечивает необходимую устойчивость работы системы регулирования. Поддерживающая сила пневматического регулятора создается диафрагмой, воспринимающей перепад давлений в его внутренних полостях.
Билет 12
Фактор устойчивости.


Билет 13
1 Степень нечувствительности механического арпд
2 Фактор устойчивости, степень неравномерности гидравлического арпд
Коэффициент А поддерживающей силы гидравлических регуляторов , как и пневматических регуляторов, не зависит от положения муфты, поэтому dA/dz = 0. Так как Е = Е0 + bz, то Fp= b, т. е. фактор устойчивости гидравлических регуляторов также определяется только жесткостью пружины.
Степень неравномерности гидравлического всережимного регулятора с гидростатическим чувствительным элементом не зависит от заданного регулируемого режима работы двигателя при условии, что всережимность обеспечивается изменением проходного сечения перепуска рабочей жидкости.
Билет 14
1 Фактор устойчивости, степень неравномерности пневматического арпд
Коэффициент А поддерживающей силы гидравлических регуляторов, как и пневматических регуляторов, не зависит от положения муфты, поэтому dA/dz = 0. Так как Е = Е0 + bz, то Fp= b, т. е. фактор устойчивости гидравлических регуляторов также определяется только жесткостью пружины.
Или
Коэффициент А поддерживающей силы гидравлических регуляторов , как и пневматических регуляторов, не зависит от положения муфты, поэтому dA/dz = 0. Так как Е = Е0 + bz, то Fp= b, т. е. фактор устойчивости гидравлических регуляторов также определяется только жесткостью пружины.


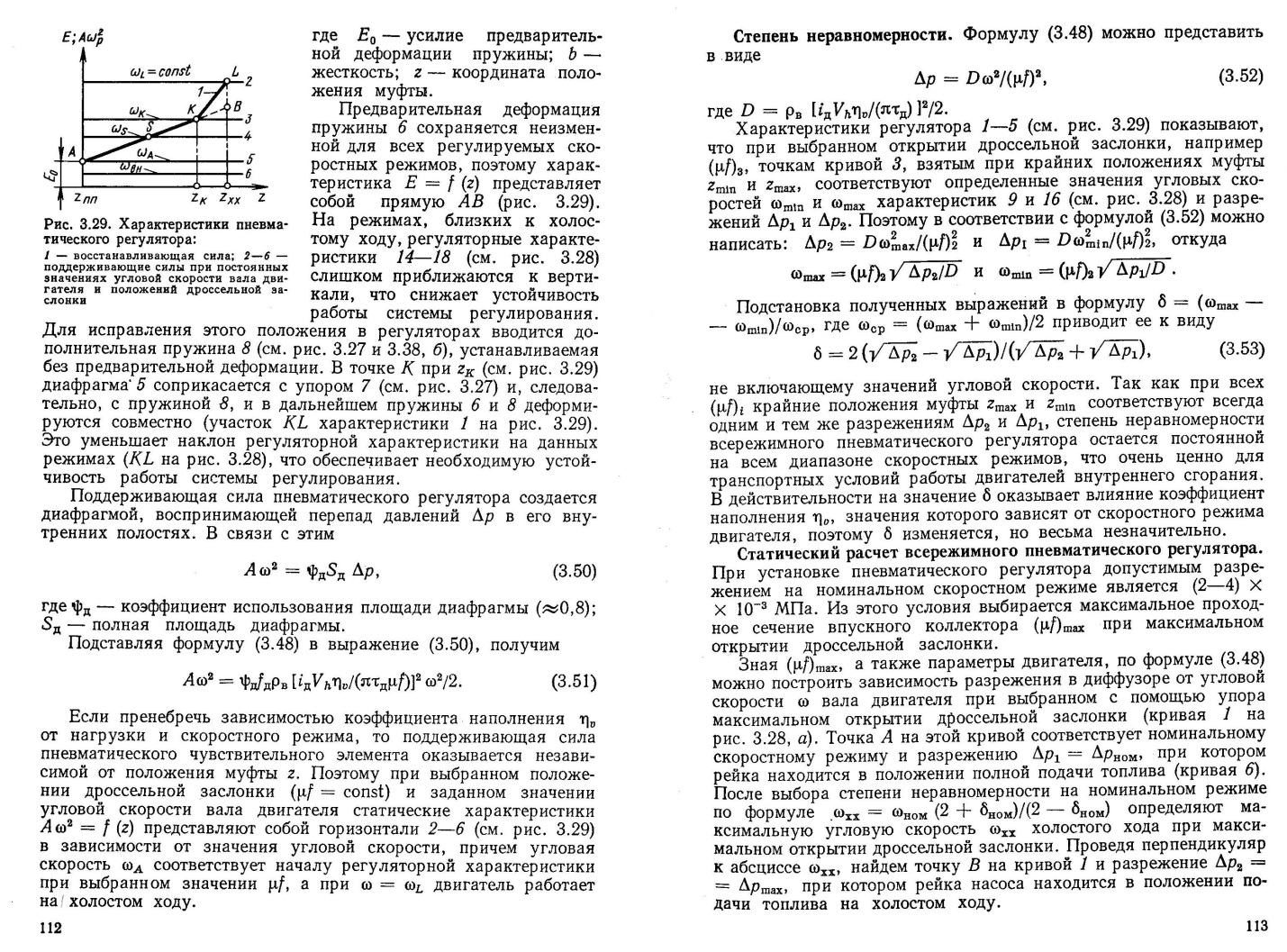
Формула не включает значений угловой скорости. Учитывая, что при всех (μf)i крайние положения муфты zmах и zmin соответствуют всегда одним и тех же разрежениям Δрmах и Δрmin, степень неравномерности всережимного пневматического регулятора не зависит от регулируемого скоростного режима и остается постоянной на всем диапазоне скоростных режимов. Это свойство пневматического регулятора очень ценно для транспортных условий работы двигателей внутреннего сгорания.
В действительности коэффициент наполнения ηυ зависит от скоростного режима двигателя, поэтому сделанный вывод не совсем точен. Однако полученный экспериментальным путем график (рис. 116) изменения степени неравномерности одного из пневматических регуляторов в зависимости от угловой скорости вала двигателя показывает, что δ изменяется весьма незначительно.