

42. Устройство и принцип действия электромагнитных измерительных механизмов.
В аналоговых эл. изм-х приборах широко исп-ся Эл-мех. измерит-ие преоб-ли, входной величиной кот. явл. ток, а выходной – перемещение указателя отсчётного устройства. Эти преобразователи получили название измерительных механизмов. Устройство и назначение отдельных конструктивных элементов рассмотрим на примере амперметра с Эл-маг. изм-м механизмом. ИМ-измерительный мех-м.
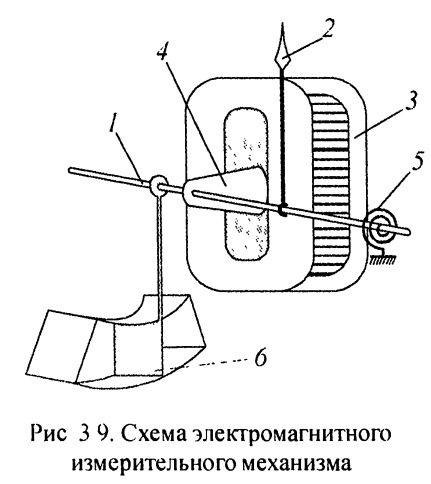 Осн.
элементом неподв. части ИМ явл-ся
катушка1, а осн. Эл-том подв. части явл.
сердечник 2 из ферромагн. материала
закрепл. на оси 3. При вкл. эл-магн. изм.
мех-ма в эл. цепь, магнитное поле протекает
по катушке 1 (входная величина) втягивает
рсердечник внутрь катушки, в рез-те чего
возн-й врашающий момент Мвр.
Осн.
элементом неподв. части ИМ явл-ся
катушка1, а осн. Эл-том подв. части явл.
сердечник 2 из ферромагн. материала
закрепл. на оси 3. При вкл. эл-магн. изм.
мех-ма в эл. цепь, магнитное поле протекает
по катушке 1 (входная величина) втягивает
рсердечник внутрь катушки, в рез-те чего
возн-й врашающий момент Мвр.
Зависимость момента Мвр. при токе I1 от угла отклонения подвижной части приведена на рис.
Если ток имеет большее значение, то тгда вращающий момент возрастает, подвижн. часть поворачивается с подвижной частью 9. Внутр. конец пружины закреплён на оси, а наружный на неподвжн. части ИМ. Момент Мвр. равен:
Мвр.=W*d где W – удельный противодействующий момент.
Потому при токе I1 подвижн. часть отводится на угол α1, а ток I2 – на угол α2, а α2> α1.
Первая часть любого изм. механизма представл. собой колеб. систему в следствие чего после вкл. ИМ, а также после измерения величины подв. части буд. совершать затухающие колебания около положения равновесия. Чтобы увеличить затухания и уменьшить время установления равновесия в ИМ прим. спец. устройства успокоители.
В эл-магн. изм. механизме в кач. успокоителя прим. крыло 12, кот. при повороте подв. части расходует энергию перегонки воздуха в камере из одной части в другую.
Как видно из рассм конструкции ИМ сод. след. узлы:
- устройство сздающее вращающий момент от электр. величины;
- устройство создающее противодействующий момент зависит от угла отклонения
-отсчётное устройство, успокоитель и ряд вспом. деталей
Погрешности изм. мех-ов вкл:
- преобразование тока во вращающий момент
- преобразование момента в угол поворота подв. части
- преобразование угла поворота в отсчёт по шкале прибора
43. Устройство и принцип действия электростатического измерительного механизма.
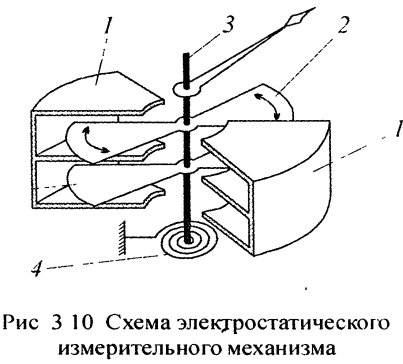
ЭП применяются для измерения напряжения постоянного и переменного тока. Вращающий момент в электростатических измерительных механизмах возникает в результате взаимодействия двух систем заряженных проводников, одна из которых является подвижной. Измерительный механизм подобных приборов выполняется в виде переменного конденсатора малой емкости. Емкость системы изменяется в результате изменения поверхности электродов. Измерительный механизм состоит из неподвижных камер 1 и подвижных пластин 2, закрепленных на оси 3. Измеряемое напряжение подводится к неподвижным камерам и подвижных пластинам, которые стремятся расположится так, чтобы емкость системы была наибольшей, т.е. продвигаются внутрь камер. Противодействующий момент создается пружиной 4. Вращающий момент, возникающий в измерительном механизме, составляет М=dA/dα, где А – энергия электростатического поля (А=0,5СU²), следовательно вращающий момент в механизме будет определятся соотношением M= ½ (dC/dα)U², где С – емкость системы, U – приложенное напряжение. Если противодействующий момент создается упругими элементами (Mпр= Wy α), то угол поворота подвижной части составит α= (1/2Wy ) (dC/dα)U², т.е. зависимость угла поворота от напряжения нелинейна, линейности добиваются изготовлением пластин специальной формы. ЭП имеют очень малое потребление мощности, а на постоянном токе это потребление равно нулю, т.к.ток не течет через измерительный механизм. Показания приборов не зависят в широком диапазоне от изменений частоты и формы измеряемого напряжения; изменения температуры окружающей среды и внешние магнитные поля также не являются помехами для измерений. При использовании ЭП в качестве вольтметров измеряемое напряжение подается непосредственно на измерительный механизм. У вольтметров на малые и средние напряжения воздушный зазор между пластинами очень мал и возникает опасность короткого замыкания при случайных ударах, тряске. Для избежания этого используют различные защитные схемы.