

Задание №7.
После введение нелинейного звена структурна схема примет вид:
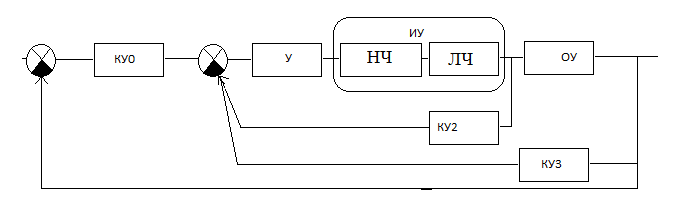
Рисунок 3.7.1 - Вид системы с нелинейным звеном
Выделим нелинейную и линейную части:

Рисунок 3.7.2 - Преобразованная система
Передаточная функция линейной части в общем виде запишется так:
Wлч(S)=Wиу(S)*(Wоу(S)*(Wky0(S)+Wky3(S))+Wky2(S))*Wy(S));
,
,
,



Подставив значения передаточных функций
(значения Ку*Киу =(Ку*Киу)тр из задания №2)получим:
Wлч(S)= ;
;
Построим годограф Wлч(S) и на одном графике:
Таблица 3.7.1 - Значения для построения АФЧХ



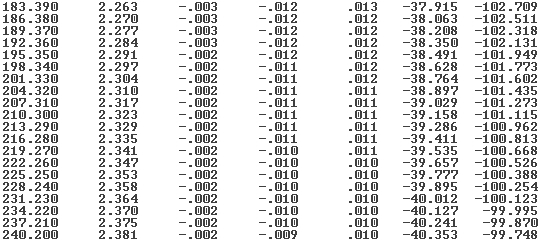

Рисунок 3.7.1 - Годограф Wлч и -1/R(a)
Из рисунка 3.7.1 видно, что пересечений Wлч(S) c -1/R(a) нет, соответственно периодические решения отсутствуют.
Задание №8.
Вопросы к заданию №1:
Запишите значения передаточных функция для схемы

Рис3.8.1 - Вид системы
Ответ: W(S)=W1*W4*W2/(1-W2*W1)
Вопросы к заданию №2
Запишите выражения которое будет математически выражать έ(t) по скорости.
Ответ:
Вопросы к заданию №3
Как штрихуется кривая Д-разбиения?
Как находится концевая прямая?
Ответ:
Кривая Д-разбиения штрихуется 2 раза: слева, если Δ(w)>0 и справа, если меньше.
Если старший коэффициент полинома зависит от одного из параметров, то приравняв к 0 получаем уравнение концевой прямой
Вопросы к заданию №4
Определите запас устойчивости системы по амплитуде и фазе.

Рисунок 3.8.2 – Логарифмические характеристики
Ответ: ϒ=27.4 градусов =0.4779 радиан, а Н=8,33 градус =0.1454 радиан.
Вопросы к заданию №5
Какие основные этапы включаются в аналитический метод синтеза?
Ответ:
-Выбор структурной схемы;
-Выбор желаемой передаточной функции;
-Определение параметров корректирующих устройств.
Вопросы к заданию №6
Постройте переходной процесс трапеции изображенной на рисунке 3.8.3 (методом трапеций).

Рисунок 3.8.3 - Трапеция
Вопросы и задания к заданию №7
Как определяться устойчивость периодических решений?
Определить устойчивость решений на рисунке 24.

Рисунок 3.8.4 - Годограф Wлч и -1/R(a)
Ответ: Для того, чтобы решение было устойчивым при положительном приращении амплитуды годограф -1/N(а) не должен охватываться годографом линейной части. Левое – устойчивое, правое - неустойчивое
Литература:
Попов Е.П. «Теория линейных систем автоматического регулирования и управления», Москва «Наука», 1978.
Воронов А.А. «Основы теории автоматического регулирования и управления», 1977.
Воронов А.А. «Теория автоматического управления. Часть I. Теория линейных систем автоматического управления», 1986.