

5.2Предварительный выбор подшипников
Предварительный выбор подшипников осуществляется в зависимости от величины и направления сил, действующих на опоры, характера нагрузок, частоты вращения вала, требуемого срока службы и т.п.
 Для осуществления
выбора подшипников необходимо определить
следующее соотношение с.119[1]:
Для осуществления
выбора подшипников необходимо определить
следующее соотношение с.119[1]:
Fа/Fr, (5.2)
где Fr – радиальное усилие в зацеплении, Н;
Fа – осевое усилие в зацеплении, Н;
Fа/Fr=0/598=0
По таблице 9.2[1] выбираем тип подшипника. Для такого соотношения (Fа/Fr=0) соответствуют шариковые радиальные подшипники. Принимаем шариковые радиальные подшипники как однорядные. Характеристики для выбранных подшипников приведены в таблице 5.

Таблица 5- основные размеры и параметры шариковых радиальных однорядных подшипников
Наименование параметра |
Обозначение |
Подшипник № 307 (вал-шестерня) |
Подшипник № 308 (зубчатое колесо) |
Внутренний диаметр, мм |
d |
35 |
40 |
Внешний диаметр, мм |
D |
80 |
90 |
Ширина, мм |
Т |
21 |
23 |
Динамическая грузоподъёмность, кН |
С |
33,2 |
41 |
Статическая грузоподъёмность, кН |
Со |
18 |
22,4 |
Схематически шариковый радиальный подшипник представлен на рисунке 5:
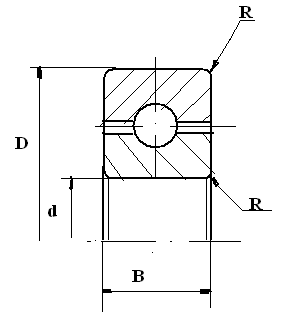
Рисунок 5- Подшипник шариковый радиальный
6 Выбор и расчёт муфты
Муфты служат для продольного соединения двух деталей привода, связанных общим крутящим моментом.
Все муфты стандартизированы и выбираются в зависимости от условий эксплуатации, величины расчётного крутящего момента и диаметров соединяемых валов, с.133 [1]:
Tp=KTH (5.1)
Где Тр-расчётный крутящий момент;TH - номинальный момент на валу, определяемый кинематическим расчётом привода; К- коэффициент учитыващий режим работы привода, принимают по таблице 10.1[1], принимаем К=1.5
Tр=40,9∙1.5=61,35Н∙м
По атласу [2] выбираем основные размеры муфты .
В данном курсовом проекте используется упругая втулочно-пальцевая муфта(МУВП). Эта муфта используется при необходимости гашения динамических нагрузок, возникающих в приводе и для компенсации несоосности.
Проверочный расчёт заключается в определении давления между пальцами и резиновыми втулками по напряжению на смятия c.134 [1]:
![]() (5.2)
(5.2)
Где Z- число пальцев(Z=6); D1 -диаметр окружности расположения центров пальцев (D1=16); l - рабочая длина втулки (l=36мм); dп -диаметр пальцев под резиной, мм (dп=8)

Кроме того, пальцы муфт рассчитывают на изгиб c.134 [1]:
![]()
Где Ft- окружная сила, определяется по формуле с.134 [1]:
![]()
 l1-длина
втулки,мм (l=30мм);
W-момент
сопротивления изгибу для сечения пальца
W=0.1dп=0.1
103=100
мм3;
допускаемые напряжения [σи]=(0.4-0.5)σт;
l1-длина
втулки,мм (l=30мм);
W-момент
сопротивления изгибу для сечения пальца
W=0.1dп=0.1
103=100
мм3;
допускаемые напряжения [σи]=(0.4-0.5)σт;
σт- предел текучести материала пальца.
Выбираем материал для пальцев сталь 40, σт=392МПа.
![]()