

Содержание
Пояснительная записка. _________________________________________________ 4
1.1 Основные понятия статики.____________________________________________5
1.1.1 Основные понятия статики.__________________________________________5
1.1.2 Аксиомы статики. __________________________________________________6
1.1.3 Виды связей. _____________________________________________________10
1.2 Плоская система сходящихся сил._____________________________________ 14
1.2.1 Понятие « Система сходящихся сил».________________________________ 14
1.2.2 Графическое условие равновесия системы сходящихся сил. ____________ 15
1.2.3 Теорема о равновесии трех непараллельных сил. _____________________ _16
1.2.4 Аналитическое условие равновесия системы сходящихся сил. ___________ 17
1.2.5 Основные понятия векторной алгебры._______________________________ 17
1.2.6 Методика решения задач.___________________________________________18
1.2.7 Пример решения задач.____________________________________________ 18
1.3. Пара сил._________________________________________________________ 21
1.3.1 Момент силы относительно точки.___________________________________21
1.3.2 Пара сил.________________________________________________________ 22
1.3.3 Теорема об эквивалентности пар. ___________________________________ 23
1.3.4 Условия равновесия системы пар сил._______________________ ________26
1.4 Плоская система произвольных сил.___________________________________27
1.4.1 Понятие « Система произвольных сил».______________________________ 27
1.4.2 Приведение системы произвольных сил к данному центру.______________28
1.4.3 Равнодействующая произвольной плоской системы сил. ________________29
1.4.4 Частные случаи приведения произвольной плоской системы сил._________31
1.4. 5Условия равновесия произвольной плоской системы сил.________________31
1.4.6.Система параллельных сил._________________________________________32
1.4.7 Методика решения задач.___________________________________________33
1.4.8 Пример._________________________________________________________ 34
1.5. Центр тяжести плоской фигуры.______________________________________36
1.5.1 Центр системы параллельных сил.___________________________________36
1.5.2 Сила тяжести и центр тяжести тел.___________________________________38
1.5.3 Статический момент площади относительно ости.______________________38
1.5.4 Методы определения центра тяжести.________________________________ 39
1.5.5 Центр тяжести простейших фигур.___________________________________39
1.5.6 Методика решения задач по определению центра тяжести фигуры сложной формы.______________________________________________________________ 42
1.5.7 Примеры решения задач.___________________________________________42
1.6 Устойчивость равновесия.___________________________________________50
1.6.1 Равновесие свободного тела._______________________________________ 50
1.6.2 Условия равновесия несвободного тела.______________________________ 51
1.6.3 Равновесие тела, имеющего неподвижную точку.______________________52
1.6.4 Равновесие тела имеющего неподвижную ось вращения.________________53
1.6.5 Условия равновесия тела, имеющего опорную поверхность. _____________54
Литература.__________________________________________________________56
Пояснительная записка.
Настоящее пособие является основной частью учебно-методического комплекса. Программой дисциплины Техническая механика" на изучение теоретической части отводится 70 часов и практические занятия 70 часов.
Материал изложен в соответствии с требованиями Государственного образовательного стандарта к минимуму содержания и уровню подготовки выпускников по специальности 270203 «Строительство и эксплуатация зданий и сооружений». Эта дисциплина является общепрофессиональной и служит основой для изучения специальных дисциплин: «Строительные конструкции", «Архитектура»В данном пособии рассмотрены все темы рабочей программы. По разделу «Теоретическая механика» С целью лучшего усвоения при изложении материала каждой темы приводится цель и основные вопросы, подлежащие изучению. С целью активизации познавательной деятельности студентов наряду с традиционным изложением материала предусмотрено опережающее задание или проблемно- познавательные логические задачи.
Материал изложен кратко, лаконично, последовательно. Для более глубокого изучения материала составлен список дополнительной литературы.
В данной дисциплине много времени отводится на практические занятия, поэтому в пособие представлена методика и примеры решения задач
В дополнении к курсу лекций разработана компьютерная программа тестирования.
Для наглядности в ряде лекций предусмотрены рисунки. Данный курс лекций имеет электронный вариант, что дает возможность дистанционного обучения для студентов заочной формы обучения.
1.1 Основные понятия статики
При изучении темы рассмотрим следующие вопросы:
1.1.1 Основные понятия статики
1.1.2 Аксиомы статики
1.1.3 Виды связей
В результате изучения темы студент должен :
знать понятия связь, реакция, аксиомы статики,
уметь определять реакции связей.
После изучения темы необходимо ответить на следующие вопросы:
В какой связи реакция всегда направлена по нормали?
Какие задачи решает статика?
Что такое « сила»?
4. Какие виды связей вы знаете? Какие в них возникают реакции?
Техническая механика – комплексная наука о взаимодействии твердых тел, прочности материалов, методах расчета элементов конструкций зданий и сооружений на внешние воздействия.
Техническая механика состоит из трех разделов: теоретическая механика, сопротивление материалов, статика сооружений.
Одним из разделов теоретической механики является статика.
Статика – раздел механики, который изучает условия равновесия абсолютно твердых тел под действием сил.
1.1.1 Основные понятия статики
Равновесие – состояние покоя, прямолинейного поступательного движения по отношению к другим телам.
Равновесие может быть относительным и абсолютным.
Если движением тела, относительно которого рассматривается равновесие, можно пренебречь, то это равновесие абсолютное, если нельзя пренебречь – относительное.
Статика рассматривает 2 задачи:
Приведение системы к простейшему виду
Определение условия равновесия
Существует два метода решения задач статики: аналитический и графический.
Абсолютно твердое тело – тело, которое не деформируется (таких тел не существует)
Материальная точка – тело, размерами которого можно пренебречь, но обладающее массой.
Сила – проявление влияния одного тела на другое.
Векторная величина – характеризуется числом (модуль), направлением, точкой приложения, линией действия.
Линия действия – линия, вдоль которой действует сила.
Если на тело
действует несколько сил, то это называют
системой сил {![]() }
}
Силы бывают:
- внешними
- внутренними.
Внешние силы бывают:
- реактивными
- активными.
Активные силы стремятся вызвать движение.
Реактивные силы стремятся препятствовать перемещению тел от действия активных сил.
Силы бывают распределенными и сосредоточенными.
Свободное тело – тело, движению которого ничто не препятствует.
Тела, ограничивающие движение других тел, называются связями.
Реакция связи – сила, с которой связь действует на тело.
Эквивалентные силы – если одну систему сил можно заменить другой и состояние тела при этом не изменится, то состояние этих сил будет эквивалентным.
Равнодействующая сила – одна сила, заменяющая систему сил, и при этом состояние тела не изменяется.
Уравновешенная система сил (эквивалентная нулю) – система сил, приложенная к телу и при этом не меняющая его состояние.
1.1.2 Аксиомы статики
Свободное от внешних воздействий тело сохраняет состояние покоя или равномерного прямолинейного движения
Свободное твердое тело находится в равновесии под действием двух сил, если эти силы направлены вдоль одной прямой в противоположные стороны и равны по модулю F1=F2 ( смотри рис.1.1.1)
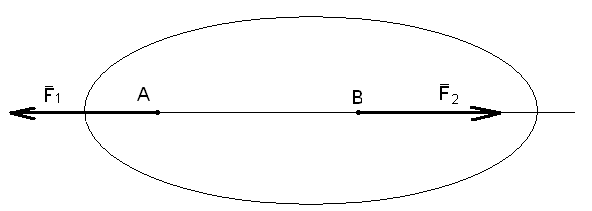
Рис. 1.1.1
Действие силы на тело не изменится, если к телу добавить или отнять уравновешенную систему сил.
Правило параллелограмма. Равнодействующая двух сил, приложенных к твердому телу в одной точке под углом друг к другу, равна их геометрической сумме, т. е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (смотри рис1.1.2).
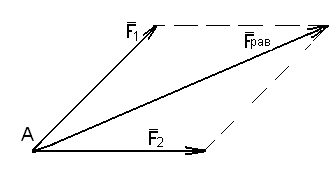
Рис. 1.1.2
Закон равенства действия и противодействия. Силы, с которыми действуют друг на друга 2 тела, всегда равны по модулю и противоположно направлены вдоль одной прямой ( смотри рис.1.1.3)

Рис.1.1.3
Принцип отвердевания. Если деформируемое тело находится в равновесии, то это равновесие не нарушается, если тело становится твердым.
Из вышеизложенных аксиом вытекает два следствия:
Следствие 1:
Действие сил на тело не изменится, если точку приложения силы переместить вдоль линии действия силы (смотри рис.1.1.4).
Доказательство:
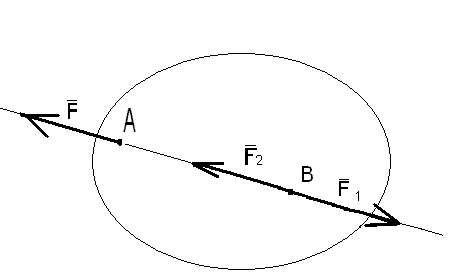
Рис.1.1.4
На тело действует
сила
![]() в точке А. В точке В приложим уравновешенную
систему сил
в точке А. В точке В приложим уравновешенную
систему сил
![]()
![]()
![]()
![]() .
При этом будет выполнятся равенство:
.
При этом будет выполнятся равенство:
F=F1=F2
Теперь на тело
будет действовать вместо силы
![]() ,
система сил
,
система сил
![]() 1,
,
при этом по аксиоме 3 состояние тела не
изменится и будет выполняться равенство.
1,
,
при этом по аксиоме 3 состояние тела не
изменится и будет выполняться равенство.
=
1,
=![]() +
+![]() ,
т. к.
=
0 по аксиоме 2, то
=
,
что и требовалось доказать.
,
т. к.
=
0 по аксиоме 2, то
=
,
что и требовалось доказать.
Следствие 2:
Если к твердому телу приложена уравновешенная система сил, то любая из этих сил, взятая с противоположным знаком, является равнодействующей для всех остальных сил (смотри рис 1.1.5).
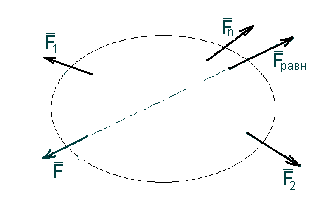
Рис.1.1.5
Доказательство:
Дано тело, находящееся
под действием системы сил {![]() ,
,
…,
,
,
…,![]() }.
}.
Заменим систему
сил {![]() ,
,
…,
}одной силой
рав.
В результате мы пол{
,
,
…,
}.
,
,
…,
}одной силой
рав.
В результате мы пол{
,
,
…,
}.
Тело действует две силы : и рав. Так как тело находится в равновесии то по аксиоме 2 эти силы должны быть равны по модулю и направлены в противоположные стороны. Значит система сил { , , …, }=0
Аксиома 7 (о связях). Равновесие тела не нарушается, если наложенные на твердое тело связи отбросить и заменить реакциями.