

1.4.2 Определение равнодействующей аналитическим способом
Знать аналитический способ определения равнодействующей силы, условия плоской сходящихся системы сил в аналитической форме.
Уметь определять проекции силы на две взаимно перпендикулярные оси, решать задачи на равновесие в аналитической форме.
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 1.15).
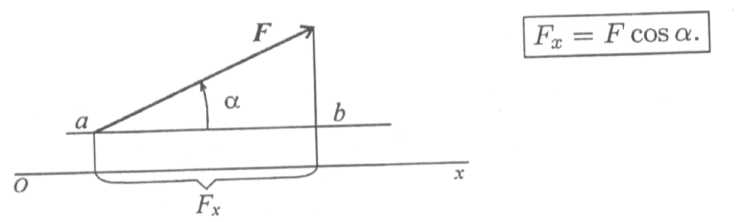
рис. 1.15
В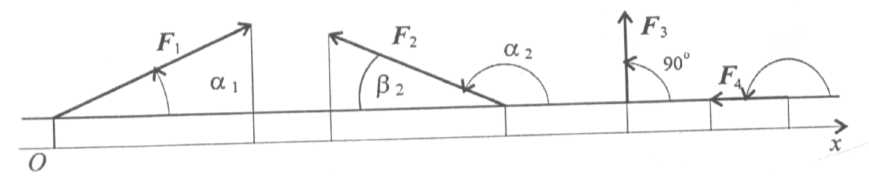 еличина
проекции силы на ось равна
произведению модуля силы на косинус
угла между вектором силы и положительным
направлением оси. Таким образом,
проекция имеет знак: положительный
при одинаковом направлении вектора
силы и оси и отрицательный при
направлении в сторону отрицательной
полуоси (рис. 1.16).
еличина
проекции силы на ось равна
произведению модуля силы на косинус
угла между вектором силы и положительным
направлением оси. Таким образом,
проекция имеет знак: положительный
при одинаковом направлении вектора
силы и оси и отрицательный при
направлении в сторону отрицательной
полуоси (рис. 1.16).
рис. 1.16
F1x = F1 cos α1 > 0; F2x = F2 cos α2 = - F2 cos β2;
cos α2 = cos (180° - β2) = - cos β2;
F3x = F3 cos 90° = 0; F4x = F4 cos 180° = - F4
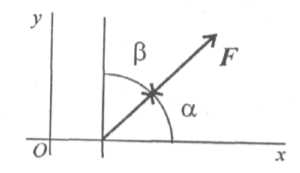
Проекция силы на две взаимно перпендикулярные оси
(рис. 1.17).
Fx = F cos a > 0;
Fy = F cos β = F sin α > 0. рис.1.17
Определение равнодействующей системы сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси (рис. 1.18а). Складываем проекции всех векторов на оси х и у (рис. 1.18б).
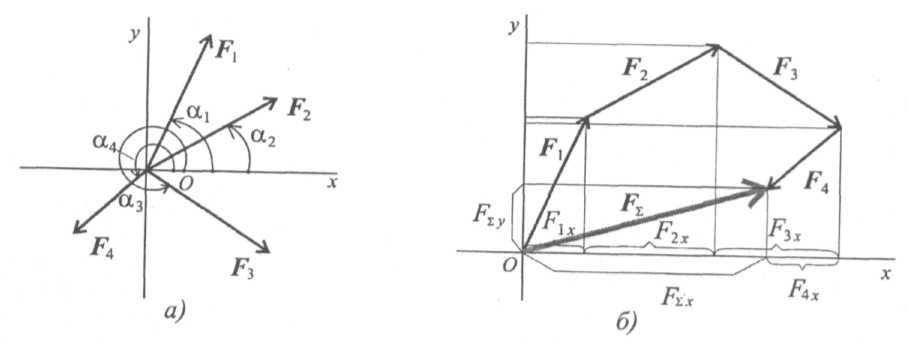
рис.1.18
FΣч = Flx + F2x + F3x + F4x; FΣн = Fly + F2y + F3y + F4y;
![]() ;
;![]() .
Модуль
(величину) равнодействующей можно найти
по известным проекциям:
.
Модуль
(величину) равнодействующей можно найти
по известным проекциям:
![]() .
Направление
вектора равнодействующей можно определить
по величинам и знакам косинусов углов,
образуемых равнодействующей с осями
координат (рис. 1.19).
.
Направление
вектора равнодействующей можно определить
по величинам и знакам косинусов углов,
образуемых равнодействующей с осями
координат (рис. 1.19).
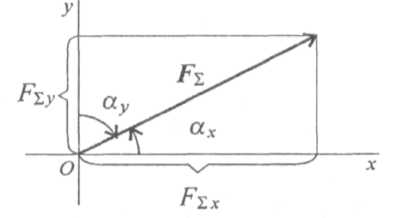
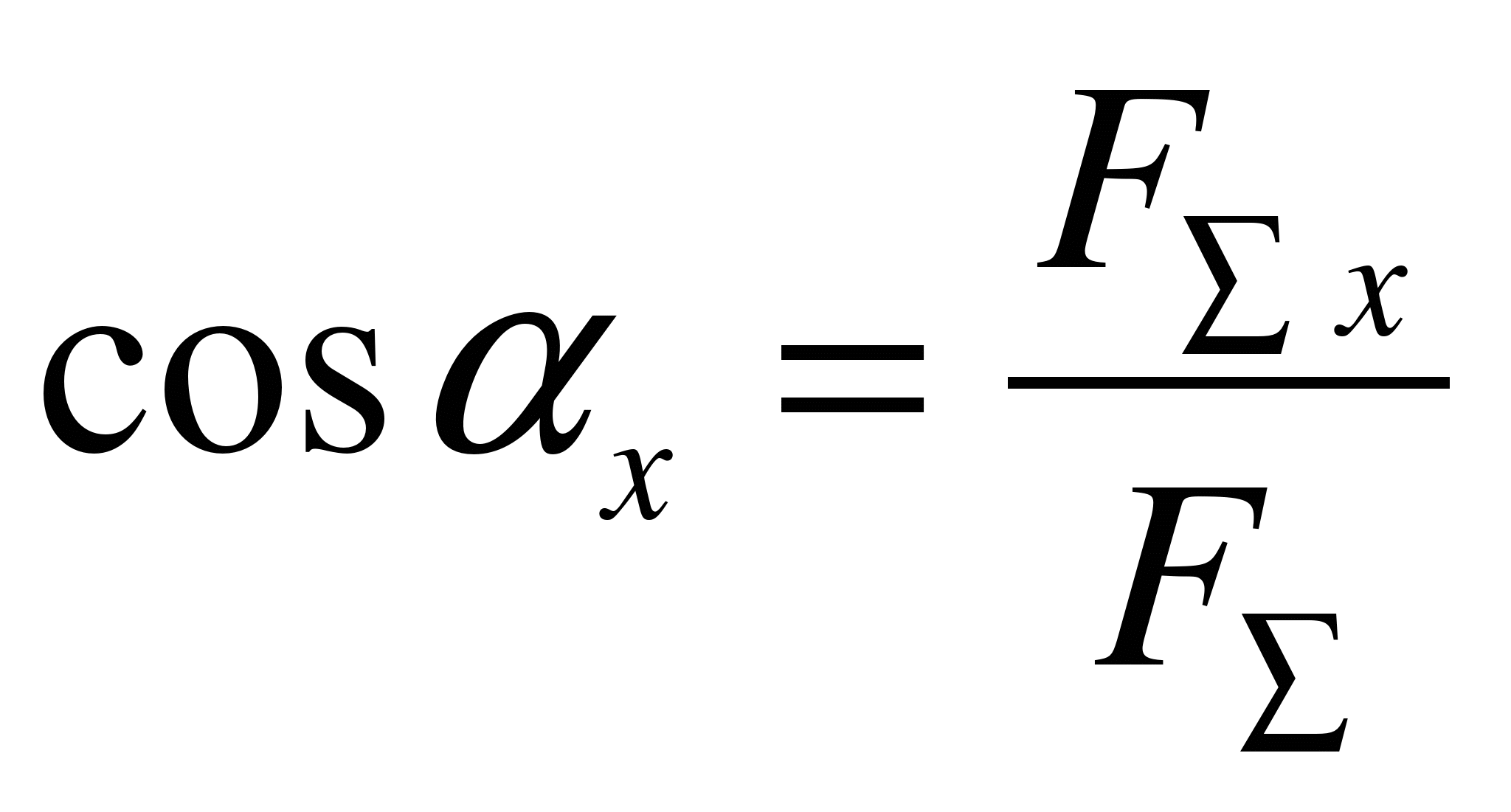
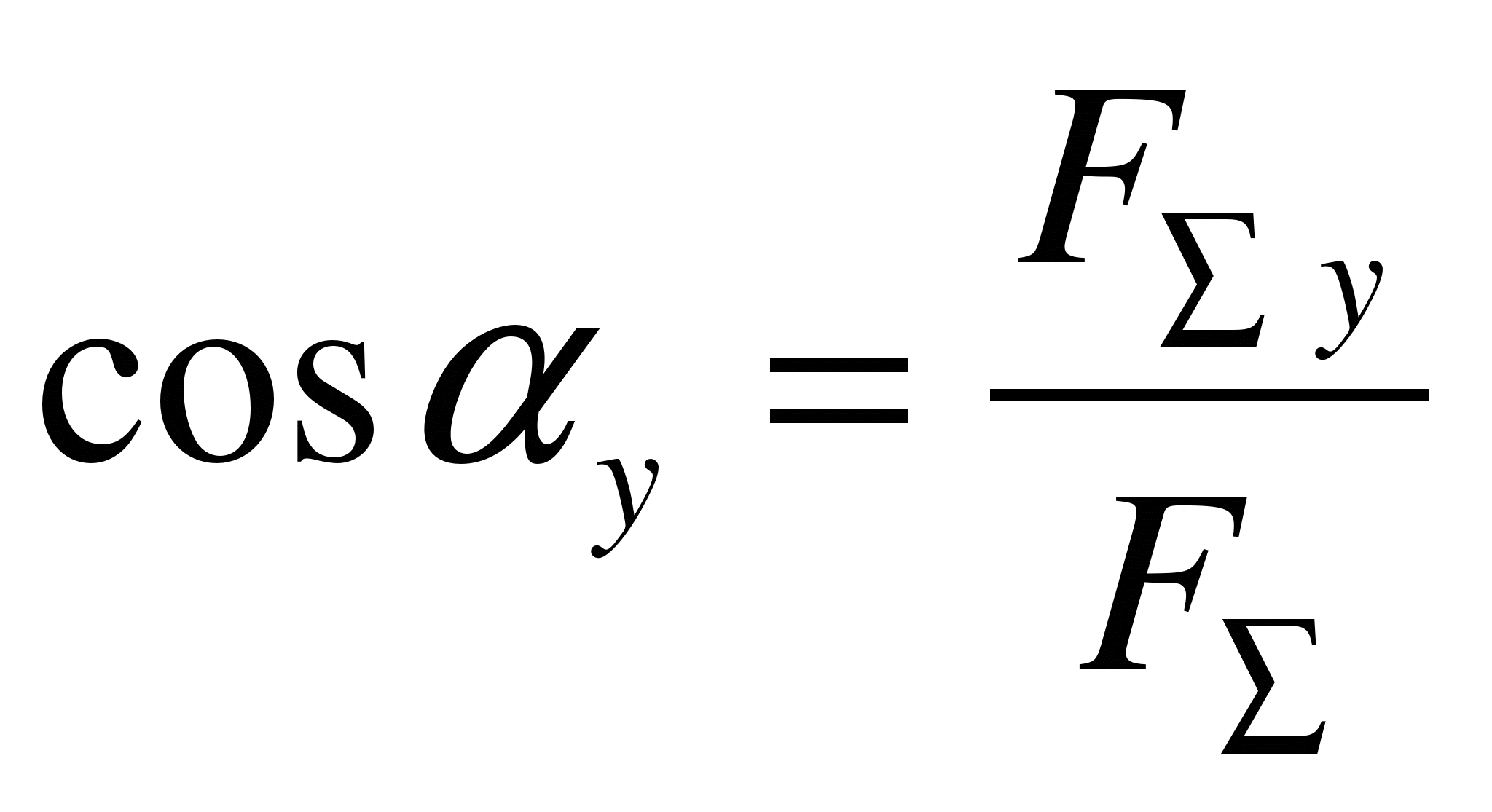
рис.1.19
Условия равновесия плоской системы сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим:

FΣ = 0.
Условия равновесия в аналитической форме можно сформулировать следующим образом:
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Система уравнений равновесия плоской сходящейся системы сил:
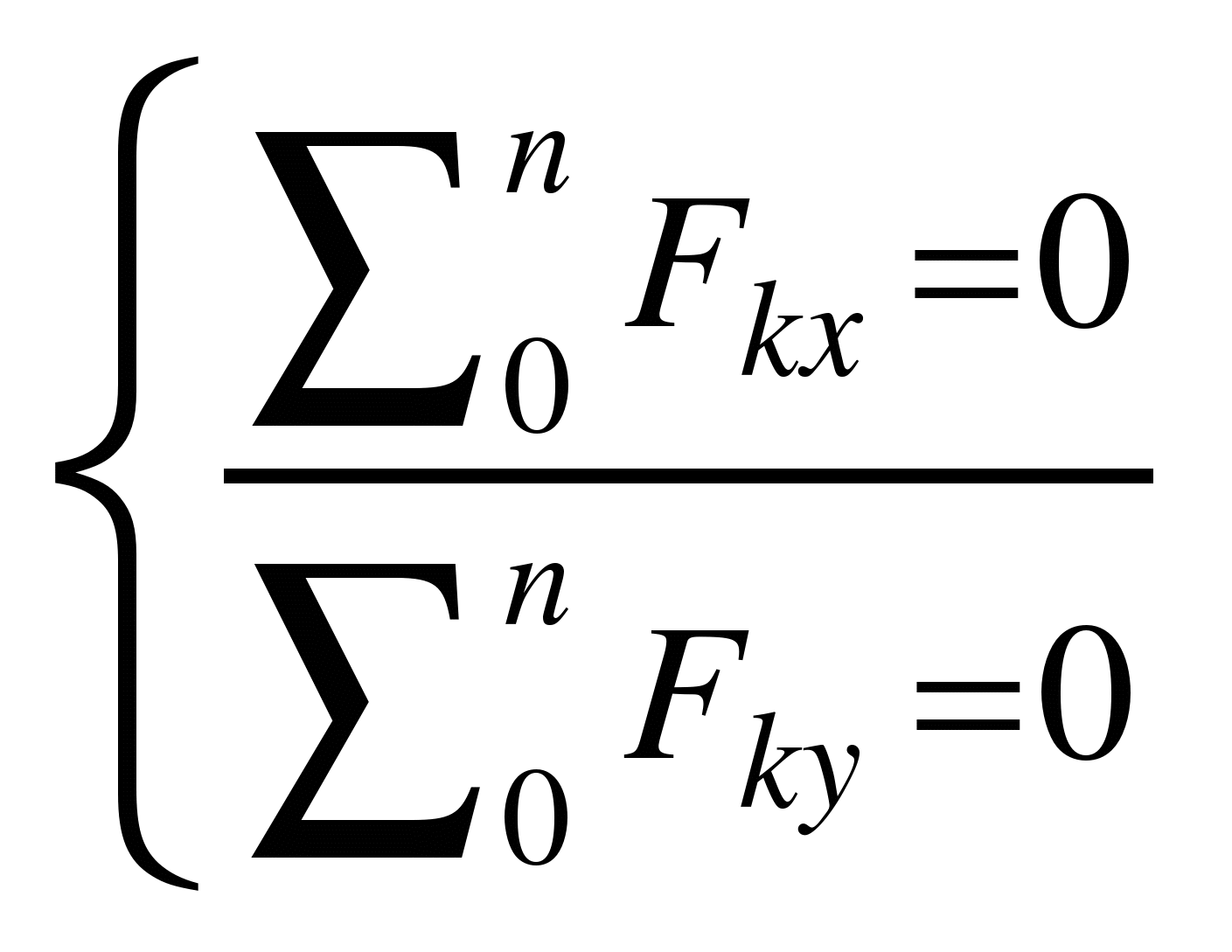
В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
Методика решения задач
Решение каждой задачи можно условно разделить на три этапа.
Первый этап: Отбрасываем внешние связи системы тел, равновесие которой рассматривается, и заменяем их действие реакциями. Необходимость этого вызвана тем, что положения статики применимы только к свободным от внешних связей телами или системами тел.
Второй этап: Расчленяем систему тел на отдельные элементы. Это дает нам возможность определить внутренние силы (если это необходимо).
Третий этап: Составляем условия равновесия для каждого отдельного элемента, из которых находим искомые неизвестные величины и направления сил или реакций.
В зависимости от метода решения задач условия равновесия используется в геометрической или аналитической форме.