

ВВЕДЕНИЕ
Пространственной фототриангуляцией называют метод камерального сгущения съемочного обоснования путем построения и уравнивания фотограмметрической сети. Координаты точек, получаемые в результате уравнивания сети, используются для составления топографических карт, планов, фотопланов и иных документов. Основной целью пространственной триангуляции является максимальное сокращение объема полевых геодезических работ.
Аналитическая фототриангуляция основана на использовании строгих математических зависимостей между координатами точек аэроснимка и местности. Ее построению предшествует измерение координат и параллаксов точек снимков на высокоточных стереокомпараторах, а использование ЭВМ для их обработки открывает возможности как учета всех искажений точек, выражающихся математическими зависимостями, так и применения строгих методов уравнивания результатов измерений методов наименьших квадратов.
Необходимость сгущения планового обоснования в пределах коротких маршрутов может возникнуть также при создании фотопланов с использованием плановой привязки прежних лет, при обновлении или корректуре старых фотопланов и в других случаях.
Работы такого рода не являются массовыми и в настоящее время их выполняют, главным образом, методом графической фототриангуляции, точность которой невелика.
В результате выполнения расчетно-графической работы студентом будут закреплены навыки использования ЭВМ для обработки результатов измерений, получены геодезические координаты главной и четырех трансформационных точек на каждый аэроснимок маршрута.
1. Вычисление центральных углов, образованных направлениями на связующие, трансформационные и геодезические точки
Вычисление центральных углов, образованных направлениями на связующие, трансформационные и геодезические точки осуществляется по формуле
cos
θ =
 (1)
(1)
где Ал,п=Ул,п-Ув;
Вл,п=-(Хл,п - Хв);
Хл,п; Ул,п – отсчеты по шкалам стереокомпаратора на точки, определяющие левое и правое направления угла;
Хв, Ув- отсчеты на вершину угла.
Расчеты по приведенной формуле выполняют с помощью программы Simplex (рисунок 1).
Исходные данные для расчетов выполняются сначала для контрольного примера. Порядок ввода данных и их значения для контрольного примера приведены в таблице 1.
Таблица 1 – Порядок ввода исходных данных для контрольного примера
Вводимая величина |
Значение |
ХВ |
84,39 |
YВ |
-3,14 |
рВ |
82,092 |
qВ |
-4,485 |
ХЛ |
2,09 |
YЛ |
-2,85 |
pЛ |
78,140 |
qЛ |
-5,827 |
ХП |
42,94 |
YП |
37,54 |
pП |
79,730 |
qП |
-4,760 |
При вводе исходных данных необходимо ввести число ограничений – 12, переменных – 12. (Для контрольного примера число ограничений – 12, переменных – 1.)
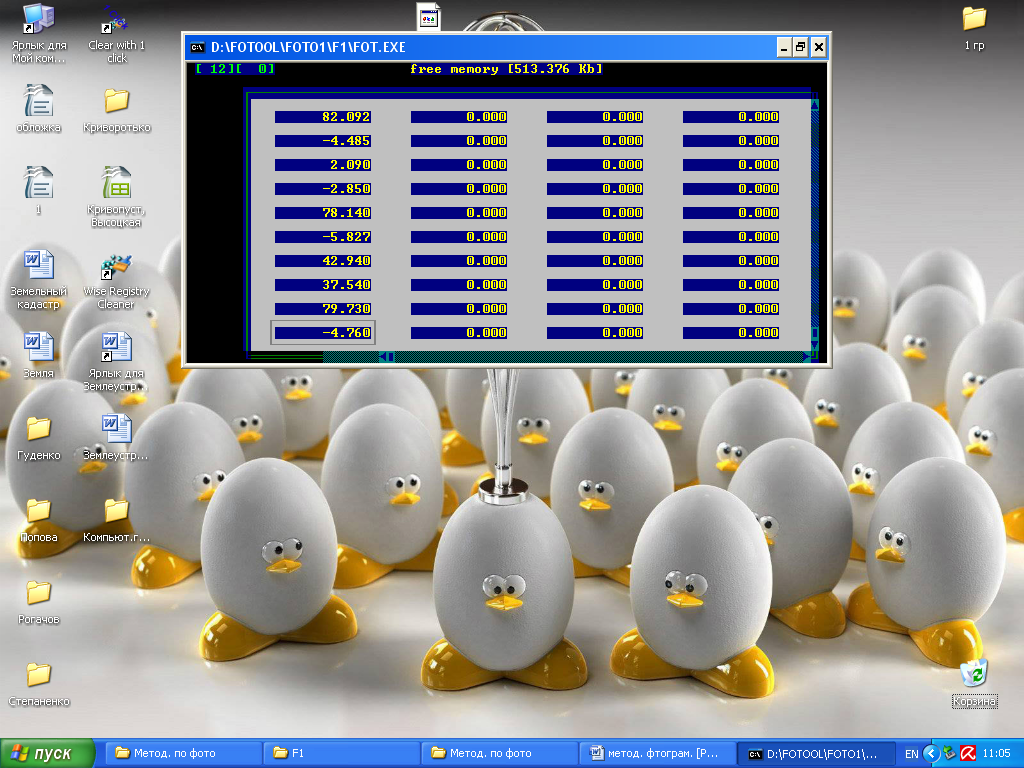
Рисунок 1 – Пример ввода исходных данных контрольного примера
После ввода данных необходимо сохранить их и получить решение (рисунок 2).
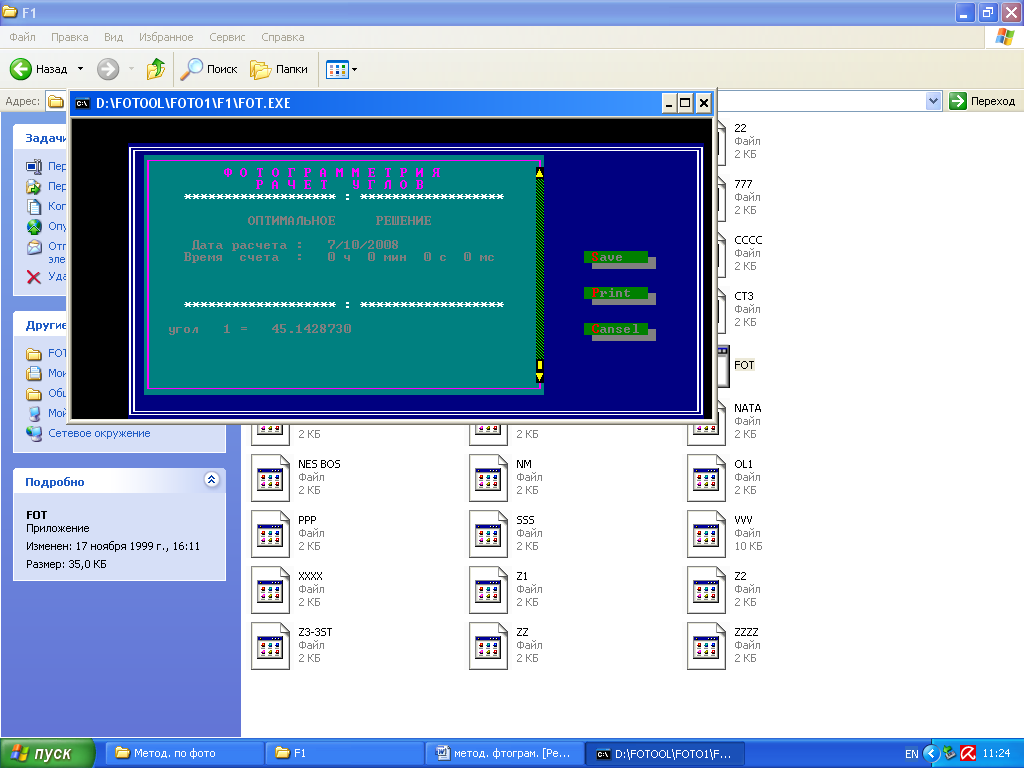
Рисунок 2 – Результат решения контрольного примера
Результаты вычисления выписывают в журнал-схему (рисунок 3), которую составляют для каждой стереопары.
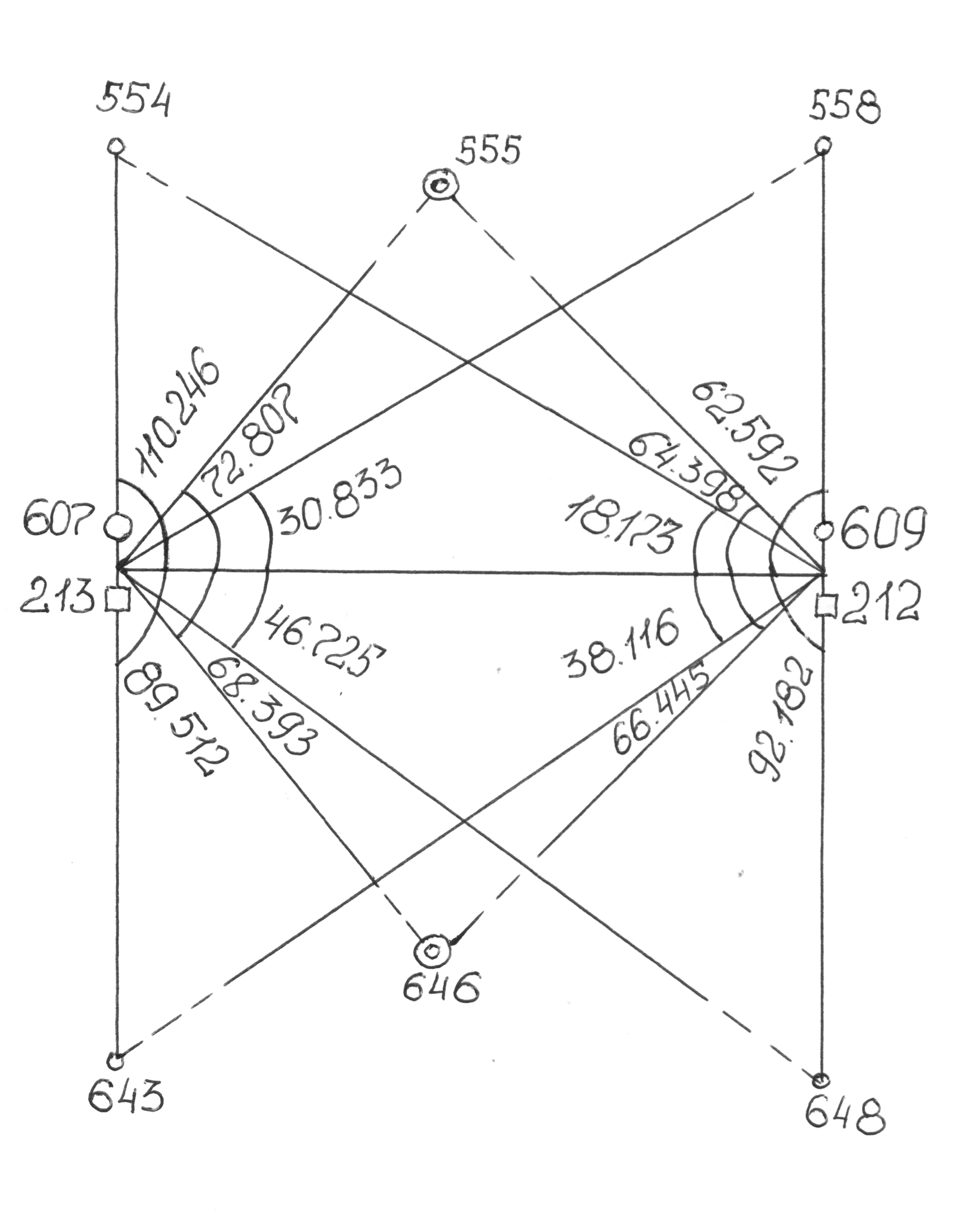
Рисунок 3 – Журнал-схема определения центральных углов на стереопаре 213-212
2. Уравнивание углов в ромбических сетях
Каждый
ромб представляет собой центральную
систему (рисунок 4), в которой возникает
четыре условия
фигур,
условие горизонта и полюсное условие.
Уравнивание за условия фигур не выполняют,
так как углы γ=180-(α+β).
Условное
уравнение горизонта состоит в том, что
сумма углов
βi
должна
быть равной 360°. В противном случае
β1+β2+β3+β4-360 =Wr.
Поправка в каждый угол Vβi=-![]() .Чтобы
не нарушалось условие фигур, в углы α1
и γ2
вводят поправки
.Чтобы
не нарушалось условие фигур, в углы α1
и γ2
вводят поправки
![]()
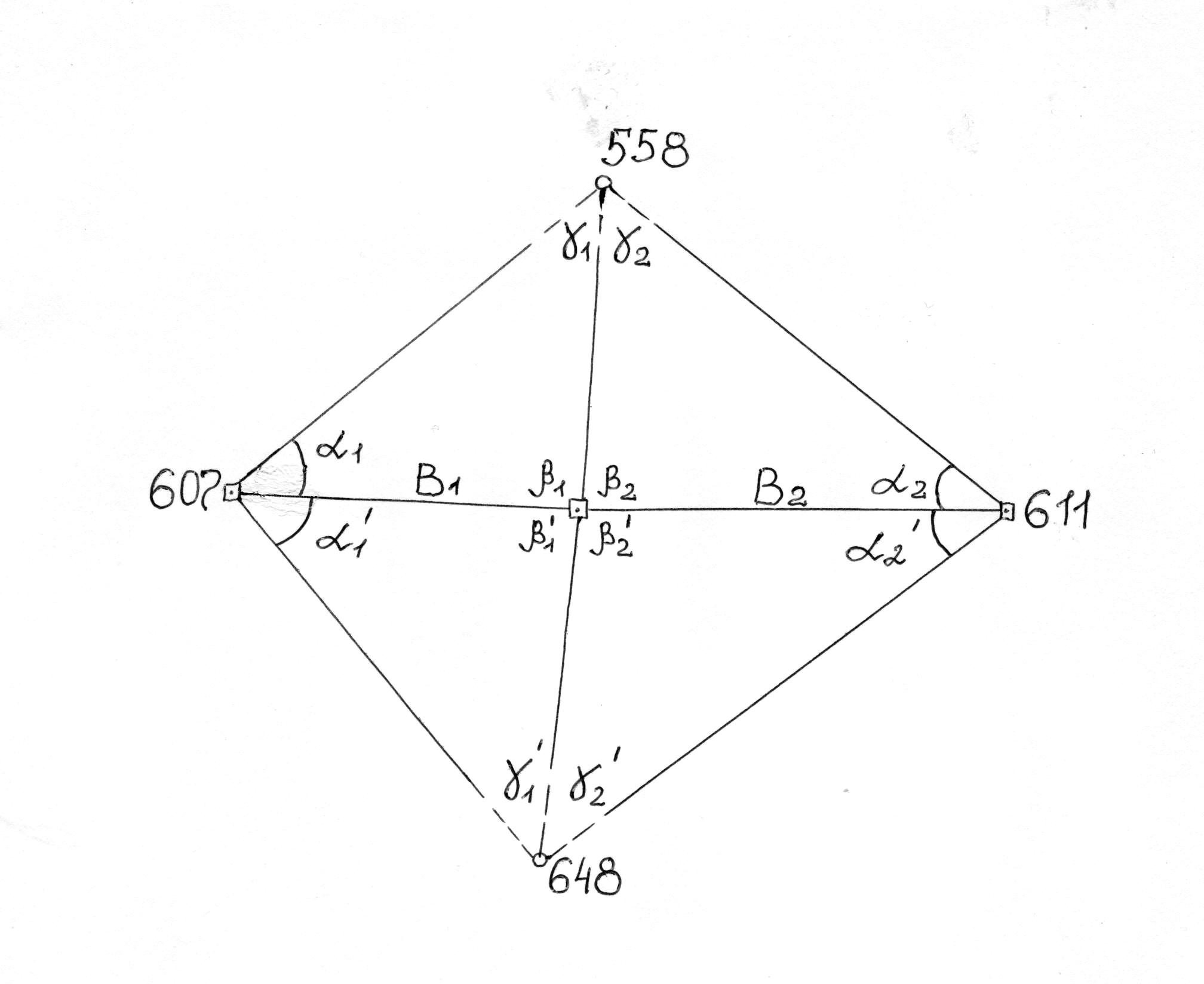
Рисунок 4 – Составление условных уравнений в ромбической сети
Полюсное условное уравнение для ромбической сети в линейном виде выглядит:
δα1Vα1-δγ1Vγ1+δγ2Vγ2-δα2Vα2+δα2Vα2-δγ2Vγ2+δγ1Vγ1-δα1Vα1+Wп=0,
где
![]() ,
Wп=
,
Wп=![]() (
(![]()
Для
съемочной сети поправки в углы αi
и γi
равными,
получим
![]() .
Значения поправок, свободных членов и
их допустимых значений вычисляют с
помощью программы Simplex
(рисунок 1).
.
Значения поправок, свободных членов и
их допустимых значений вычисляют с
помощью программы Simplex
(рисунок 1).
Исходные данные для расчетов выполняются сначала для контрольного примера. Порядок ввода данных и их значения для контрольного примера приведены в таблице 2.
Таблица 2 – Порядок ввода исходных данных для контрольного примера
Вводимая величина |
Значение |
α1 |
63,435 |
γ2 |
53,130 |
α2/ |
30,965 |
γ1/ |
36,870 |
γ1 |
45,00 |
α2 |
50,906 |
γ2/ |
45,00 |
α1/ |
34,695 |
При вводе исходных данных необходимо ввести число ограничений – 8, переменных – 5. (Для контрольного примера число ограничений – 8, переменных – 1.)
После ввода данных необходимо сохранить их и получить решение (рисунок 2).
Решение: WП0 = 8,0787×10-4, V0 =9,4966×10-5, WПдоп = 9'5410371.
Уравнивание углов в каждом ромбическом звене выполняют на отдельной схеме (рисунок 5).
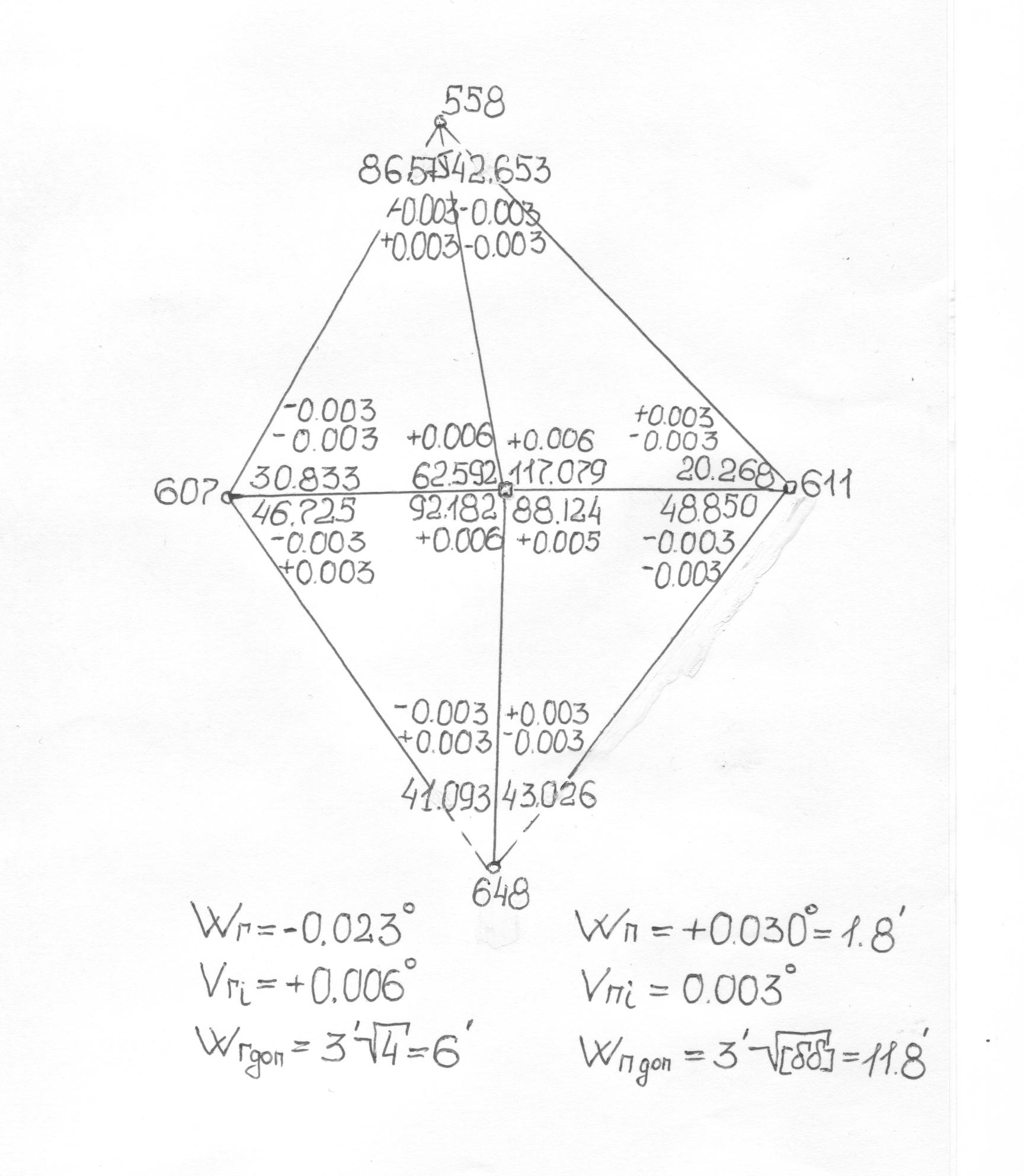
WГ=-0,0230,
VГi=+0,0060,
WГдоп=3'![]() =6'
=6'
WП=+0,0300=1,8',
VПi=+0,0030,
WПдоп=3'![]() =11,8'
=11,8'
Рисунок 5 – Уравнивание углов в ромбической сети