

3.2. Описание готового графика частот вращения.
Для пояснения физического смысла элементов графика частот вращения рассмотрим график (рис. 3.4, б), соответствующий кинематической схеме коробки передач по рис. 3.4, а.
Горизонтальные линии, обозначенные римскими цифрами, соответствуют валам. Внизу изображена логарифмическая шкала частот вращения. Лучи между соседними горизонталями соответствуют передачам.
Совокупность передач, связывающих два соседних вала, называют группой передач. На рис. 10 показаны две группы передач: р1 = 4 и р2 = 3, где p - число передач, составляющих группу. Каждая выделенная на горизонталях точка показывает определенную частоту, с которой может вращаться вал. Так, частота вращения вала IV может меняться в диапазоне 315...630 мин-1. Из каждой выделенной точки выходит к следующей горизонтали столько лучей, сколько передач в группе. Параллельные лучи в пределах группы соответствуют одной и той же передаче при различных включениях передач предшествующих групп (в данном примере при различных положениях двойных блоков.
Наклон луча и, следовательно, число перекрытых им интервалов логарифмической шкалы показывает передаточную величину передачи. Лучи, соответствующие повышающим передачам, наклонены в одну сторону (вправо - i'5, i'9), а соответствующие понижающим передачам - в другую сторону (влево - i'2, i'8 и др.).
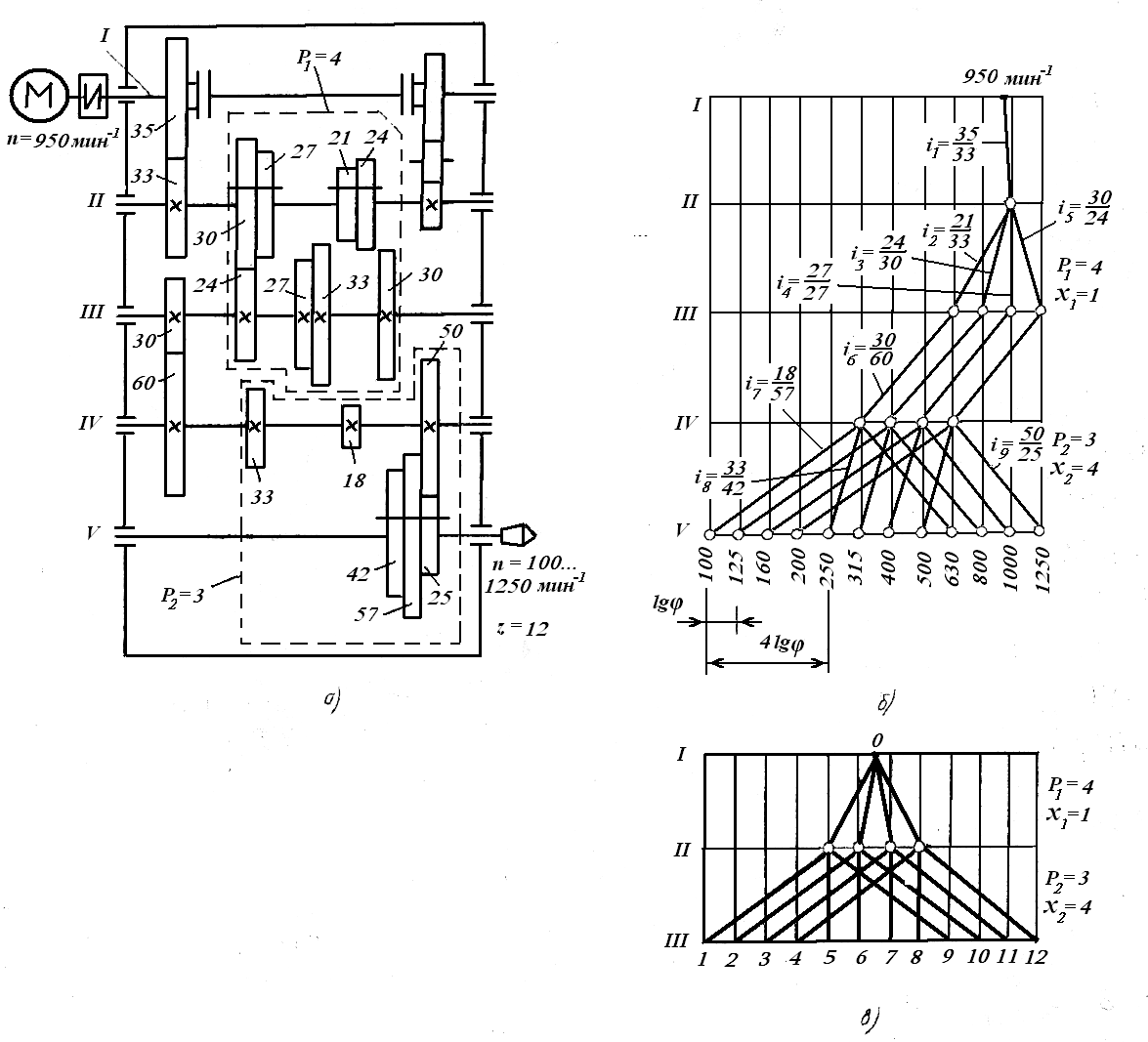
Рис. 3.4. Кинематическая схема (а), график частот вращения (б) и структурная сетка (в) коробки передач .
Луч i'5 отражает передачу, повышающую частоту вращения с 1000 (на валу 2) до 1250 мин-1 (на валу 3). Этот луч перекрывает один интервал шкалы (lg ); следовательно, передаточная величина i's = = 1,26. Передача с i'4 = 1 не меняет скорость. Луч i'3 отражает передачу, понижающую частоту вращения с 1000 до 800 мин-1, причем i'3 = 1/ = 1 / 1,25. Лучи i'6 и i'9 перекрывают по три интервала шкалы (3lg ), причем i'9 = 3 = 1,263 = 2 (повышающая передача) , i'6 = 1/3 = 1/1,263 = 1/2 (понижающая переда).
3.4. Основные зависимости.
Чтобы ряд частот вращения шпинделя был геометрическим со знаменателем , частота вращения каждого промежуточного вала должна изменяться по закону геометрической прогрессии, но со знаменателем x. Такому же закону должен подчиняться ряд передаточных величин в группе передач, что отражается следующим уравнением (без вывода):
i'1 : i'2 : i'3 : ... : i'p = 1 : x : 2x : ... : (p-1)x , (3.3)
где x - характеристика группы передач (индексы y i' в данном уравнении не связаны с рис. 3.4,б). Действительно, для группы р1 = 4 коробки передач по рис. 3.4,б
i'2 : i'3 : i'4 : i'5 = 1/2 : 1/ : 1 : = 1 : : 2 : 3 т. е. x1 = 1, а для группы р2 = 3 по тому же рисунку : i'7 : i'8 : i'9 = 1/3 : 1/ : 3 = 1 : 4 : 5 ,т.е.
х2 = 4. Характеристика показывает, сколько интервалов, равных lg , между концами соседних лучей в группе передач на графике, т. е. она связывает знаменатель ряда частот вращения на шпинделе и знаменатель p ряда передаточных величин в группе передач: p = x.
Значение характеристики зависит от так называемого кинематического порядка групп. Этот порядок определяет нарастание характеристики от группы к группе. Характеристика xk для некоторой группы больше характеристики xk-1 для группы, предшествующей в кинематическом порядке, в рk-1 раз, где pk-1 - число передач предшествующей группы: хk = xk-1 pk-1. Согласно этому порядку одна из групп (любая) является основной, для нее х = 1. Следующую в кинематическом порядке группу передач называют первой переборной, далее идут вторая и другие переборные группы. Характеристика любой группы равна произведению чисел передач всех групп, предшествующих в кинематическом порядке, что показано в табл. 3.1.
При прямозубых колесах в коробке скоростей:
Rp max = i'max : i'min = 2 : 1/4 = 8.
Следовательно, каждому соответствует максимально
допустимое число интервалов шкалы, охватываемых диапазоном регулирования Rp в группе:
... 1,12 1,26 1,41 1,58
[(p-1)x]max ... 18 9 6 4
Варианты, не удовлетворяющие данному ограничению, следует не принимать во внимание при поиске формулы структуры.
Чтобы не приближаться к i'max и i'min, стремятся к структурам с меньшими Rp. Чтобы выдержать неравенство (2.5). Rp в последних группах должно быть больше, чем в первых.
Для выбора рациональной структуры привода не требуется пересматривать все возможные варианты структурных сеток. Уже при выборе формулы структуры надо руководствоваться следующими рекомендациями.
1. Группы с большим числом передач (три, тем более четыре) следует располагать ближе к двигателю, так как чем больше колес на быстроходных валах, тем больше выигрыш в массе деталей, габаритах узла.
2. В кинематическом порядке в качестве последней переборной группы обычно принимают группу с минимальным числом передач, иначе сочетание максимальной характеристики х и большого числа передач р может дать слишком большой диапазон регулирования Rp в группе.
3. Последнюю переборную группу следует располагать в конце структуры. В этой группе из-за большого диапазона регулирования передаточные величины близки к предельным, следовательно, неизбежна большая редукция, нежелательная в начале структуры.
Структура по рис. 3.3 удовлетворяет всем рекомендациям, однако она возможна только при 1,41 (в противном случае Rp3 > 8). Структура по рис. 3.2, б при = 1,41 неприемлема по той же причине. При = 1,26 она возможна, но нерациональна, так как нарушены все рекомендации о порядке расположения групп и кинематическом порядке. Вообще, предпочтительны структуры, у которых в сетке лучи первых групп передач располагаются более компактно.