

Содержание
Введение............................................................................................3
Постановка задачи…………………………………………...…….5
Прямой алгоритм……………………………………………….....13
Список литературы………………………………………………..17
Приложение №1. Структурное проектирование…………...…...17
Приложение №2. Текст программы…………...…………………17
Приложение №3……...……………………………………………17
Введение
Благодаря своему широкому применению, теория о нахождении кратчайших путей в последнее время интенсивно развивается. Нахождение кратчайшего пути жизненно необходимо и используется практически везде, так же в построении дорог.
Для решения задач такого типа - используются методы динамического программирования, теории графов, о которых пойдет речь в данной работе.
Очень много задач решаются методами теории графов. Приведем несколько примеров.
1. Пусть мы имеем карту дорог, в которой для каждого города указано расстояние до всех соседних с ним. Здесь два города называются соседними, если существует дорога, соединяющая непосредственно эти два города.
2. Аналогично, можно рассмотреть улицы и перекрестки внутри одного города. Заметим, что могут быть улицы с односторонним движением.
3. Сеть компьютеров, соединенных проводными линиями связи.
4. Устройство, состоящее из микросхем, соединенных друг с другом наборами проводников.
5. Генеалогические деревья, указывающие родственные отношения между людьми, и т.д.
Теория графов - это область дискретной математики, особенностью которой является геометрический подход к изучению объектов. Основной объект теории графов-граф и его обобщения.
Родоначальником теории графов считается Леонард Эйлер. В 1736 году в одном из своих писем он формулирует и предлагает решение задачи о семи кёнигсбергских мостах, ставшей впоследствии одной из классических задач теории графов.
В курсовой работе будет рассматриваться задача о проведении дорог. Нам нужно сделать, что бы дороги, которые мы хотим проложить через города или улицы, по километражу были максимально короткими. В результате будет потрачено меньше времени и средств на строительство дорог.
Это го результата можно добиться при помощи разных алгоритмов и методов, например:
1. Алгоритм Дейкстры;
2. Алгоритм Флойда-Уоршелла;
3. Алгоритм Форда-Беллмана;
4. Расстановка меток;
5. Коммуникационная сеть минимальной длины (дерево кратчайших расстояний), и т.д.
В данной работе мы будем рассматривать последний метод, т.е. коммуникационная сеть минимальной длины (дерево кратчайших расстояний).
Коммуникационная сеть минимальной длины (или дерево кратчайших расстояний) – это совокупность дуг сети, имеющая минимальную суммарную длину и обеспечивающая достижение всех узлов сети, то есть возможность попасть из любого узла в любой другой узел. Целью работы является изучение метода решения поставленной задачи и написание программы, которая реализует данный метод и позволяет находить кратчайший путь между городами или улицами .
2. Постановка задачи
Рассмотрим задачу о проведении дорог, как задачу на графах.
Теория графов — раздел дискретной математики, изучающий свойства графов.
Теория
графов находит применение, например, в
геоинформационных системах (ГИС).
Существующие или вновь проектируемые
дома, сооружения, перекрёстки, кварталы
и т. п. рассматриваются как вершины, а
соединяющие их дороги, инженерные сети,
линии электропередачи и т. п. — как
рёбра. Применение различных вычислений,
производимых на таком графе, позволяет,
например, найти кратчайший объездной
путь или ближайший продуктовый магазин,
спланировать оптимальный маршрут.
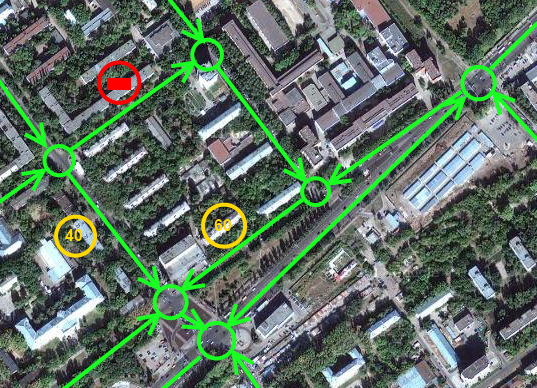 Рис.1 Представление
участка в виде графа.
Рис.1 Представление
участка в виде графа.
Граф — базовое понятие. Оно включает множество вершин и множество рёбер, являющееся подмножеством декартова квадрата множества вершин (то есть каждое ребро соединяет ровно две вершины).
Граф является ориентированным, если для каждого ребра задано направление, в котором возможно движение по этому ребру. Если движение возможно в обоих направлениях, то граф называется неориентированным.

Рис. 2
Граф называется взвешенным, если каждому ребру поставлено в соответствие некоторое число (вес).
Граф называется связным, если из любой его вершины существует путь (не обязательно состоящий из одного ребра) в любую другую.
На рисунке 2 изображен неориентированный, несвязный, невзвешенный граф.
Часть графа, которая является связной, называется компонентой связности. В графе, изображенном на рисунке две компоненты связности.
Степенью вершины (в неориентированном графе) называется количество выходящих из нее ребер.

Рис 3
Петлей называется ребро, соединяющее вершину с самой собой, показано на рисунке 3.
Простым путем в графе называется путь, в котором ни одно ребро не встречается дважды.
Циклом называется путь, не проходящий дважды через одну и ту же вершину.
Пустым называется граф без рёбер.
Полным называется граф, в котором каждые две вершины смежные. Конечная последовательность необязательно различных рёбер E1,E2,...En называется маршрутом длины n, если существует последовательность V1, V2, ... Vn необязательно различных вершин, таких, что Ei = (Vi-1,V i ).
Граф называется связным, если для любых двух вершин существует путь, соединяющий эти вершины.
Вершина, Узел — базовое понятие: точка, где могут сходиться/выходить рёбра и/или дуги. Множество вершин графа G обозначается V(G). Перекрёсток - вершина. Ребро графа — базовое понятие. Ребро соединяет две вершины графа. Дорога – ребро.
Дуга— это ориентированное ребро. Взвешенный граф — граф, каждому ребру которого поставлено в соответствие некое значение (вес ребра). Вес ребра — значение, поставленное в соответствие данному ребру взвешенного графа. Обычно, вес - вещественное число, в таком случае его можно интерпретировать как «длину» ребра. Длина дороги — вес ребра.
Дерево — одна из наиболее широко распространённых структур данных в информатике, эмулирующая древовидную структуру в виде набора связанных узлов. Является связанным графом, не содержащим циклы. Большинство источников также добавляют условие на то, что рёбра графа не должны быть ориентированными. В дополнение к этим трём ограничениям, в некоторых источниках указываются, что рёбра графа не должны быть взвешенными (Рис. 4)
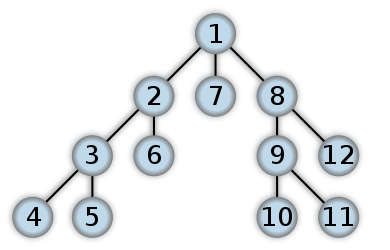
Рис.4