

Расчёт допустимого времени провала напряжения для некоторых моделей двигателей
Для анализа взяты двигатели различных классов мощностей:
4А180М4У3 – 30 кВт, 0.4кВ;
4А355М4У3 – 315 кВт, 10кВ;
А4-450-У4 – 1000 кВт, 10кВ.
Расчёт проведён для механических моментов инерции подвижных частей, равных удвоенному значению моментов инерции ротора двигателя в первом случае и максимально допустимому значению, рассчитанному по [1] для второго случая:
Jд.max=k·km·Pномv·py,
где Pном- номинальная мощность двигателя;
p – число пар полюсов, для всех случаев равное 2;
k, km, v, y- коэффициенты и показатели степени, принимаются по таблице 3.6 [1].
Порядок расчёта следующий:
- по характеристикам двигателя рассчитывается максимальное и номинальное значение механического момента, номинальное и критическое скольжение;
- вычисляется напряжение, при котором максимальный момент двигателя окажется меньше номинального момента нагрузки;
- при некотором значении момента инерции для диапазона напряжений от 0 до полученного в предыдущем пункте рассчитывается допустимая длительность провала напряжения;
- принимается следующее значение момента инерции, расчёт повторяется.
На рисунке 1 изображены зависимости предельно допустимой продолжительности провала напряжения от его величины.
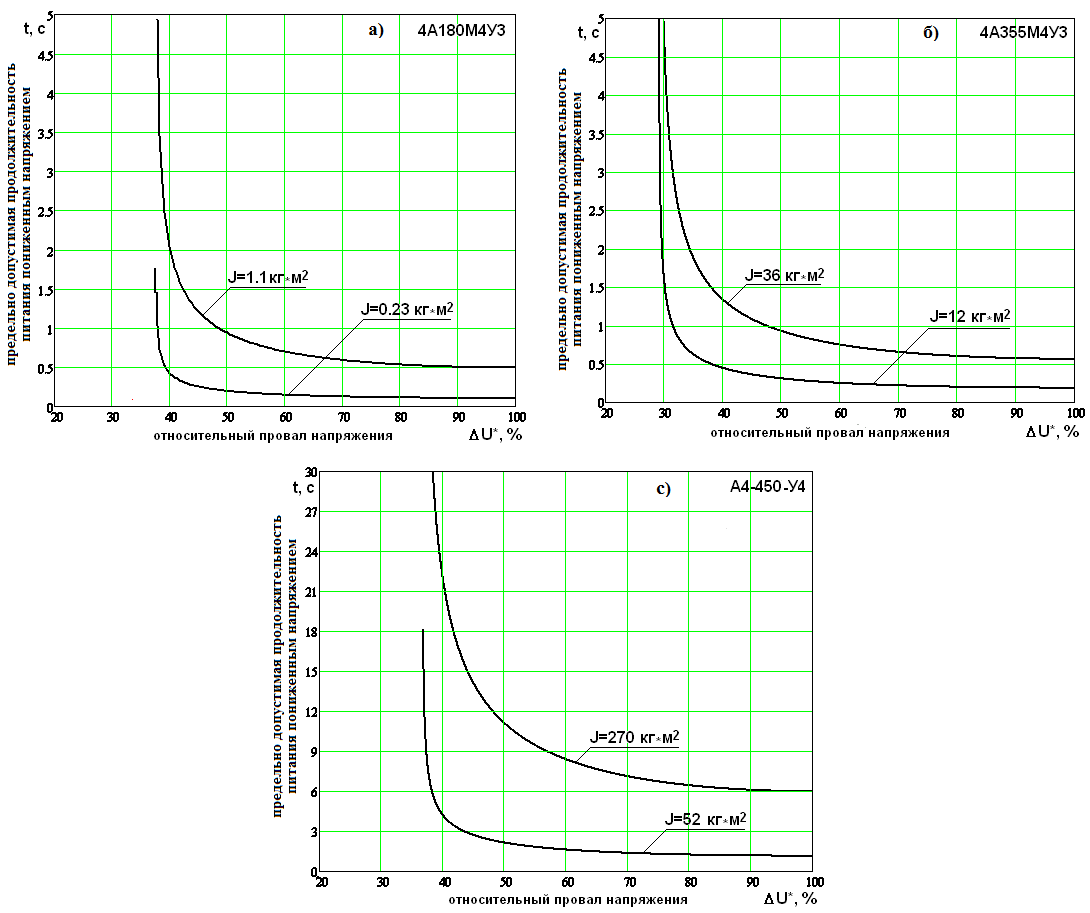
Рисунок 1 – Зависимости предельно допустимой продолжительности провала напряжения от его величины для двигателей мощностью: а) 30 кВт; б) 315 кВт; с) 1000 кВт.
Анализ результатов показывает, что допустимое время провала напряжения зависит от суммарного момента инерции подвижных частей, и в значительной мере от величины провала напряжения.
Даже при полном отсутствии напряжения в период провала допустимый интервал времени не равен нулю благодаря наличию момента инерции, не допускающему мгновенной остановки ротора двигателя.
СПИСОК ЛИТЕРАТУРЫ
1. Асинхронные двигатели серии 4А: Справ./ А.Э. Кравчик и др.- М.: Энергоиздат, 1982. – 504 с.
2. IElectro [Электронный ресурс]: Режим доступа: http://www.ielectro.ru/Document30926.html.
УДК 621.313.282.2
Реализация СпособА управления двухкатушечнЫм электромагнитнЫм приводом ударного действия л.А. Нейман
(Новосибирский государственный технический университет,г. Новосибирск)
Известны способы управлениядвухкатушечным электромагнитным двигателем ударного действия, состоящие в поочередной подаче импульсов питающего напряжения на катушки электромагнитного двигателя с интервалом времени между ними, при этом импульсы питающего напряжения подают с периодом, не менее суммарного времени рабочего и холостого хода. Понижение частоты подачи импульсов питающего напряжения на катушку рабочего и холостого хода по отношению к частоте питающего напряжения обуславливает низкую ударную мощность электромагнитного двигателя.
Также известны используемые в приводе ударных машин способы управления двухкатушечным электромагнитным двигателем возвратно – поступательного действия, в которых рабочий цикл управления осуществляется подачей импульсов питающего напряжения на катушки рабочего и обратного хода с паузой, во время которой боек движется без воздействия на него электромагнитных сил. Для повышения удельной ударной мощности электромагнитного двигателя подключениекатушки двигателя к источнику питания осуществляется на время, меньшее длительности движения бойка под действием сил создаваемых этой катушкой. Отключение катушки от источника питания выполняется до прохождения бойком половины хода. Этому способууправления присуще относительно низкая ударная мощность, связанная с питанием катушек рабочего и обратного хода только во время разгона бойка.
Эти недостатки частично устраняются в способе управления двухкатушечным электромагнитным двигателем, в котором за рабочий цикл электромагнитного двигателя на катушку рабочего хода подается два импульса питающего напряжения, а на катушку обратного хода – один импульс, причем каждый последующий рабочий цикл повторяется после паузы, равной времени прохождения одной полуволны питающего напряжения. Увеличение ударной мощности в данном способе управления, достигаемое за счет использования за рабочий цикл трех полуволн напряжения для питания катушек рабочего и обратного хода, приводит к увеличению энергии единичного удара бойка. Однако данный способ управления двухкатушечным электромагнитным двигателем развивает относительно невысокую ударную мощность, что обусловлено наличиембестоковой паузы, во время которой движение бойка осуществляется только под действием его внутренней кинетической энергии.
С целью повышения ударной мощности двухкатушечного электромагнитного двигателя разработан способ управления, реализация которого представлена на рисунок 1.
Способ
управления осуществляется следующим
образом. В момент времени
![]() на катушку рабочего хода подают импульс
питающего напряжения и боек под действием
электромагнитных сил, создаваемых
катушкой рабочего хода, перемещается
в сторону подпружиненного буфера. В
результате перемещения бойка в катушке
холостого хода образуется рабочий
воздушный зазор.
на катушку рабочего хода подают импульс
питающего напряжения и боек под действием
электромагнитных сил, создаваемых
катушкой рабочего хода, перемещается
в сторону подпружиненного буфера. В
результате перемещения бойка в катушке
холостого хода образуется рабочий
воздушный зазор.
Рисунок 1 – Временные диаграммы работы электромагнитного двигателя
В
момент времени
![]() подается импульс питающего напряжения
на катушку холостого хода и боек под
действием электромагнитных сил катушки
холостого хода получает дополнительное
ускорение и продолжает движение в
направлении подпружиненного буфера.
подается импульс питающего напряжения
на катушку холостого хода и боек под
действием электромагнитных сил катушки
холостого хода получает дополнительное
ускорение и продолжает движение в
направлении подпружиненного буфера.
В
период паузы между импульсами питающего
напряжения на интервале
![]() боек, двигаясь по инерции, сжимает
подпружиненный буфер, и изменяет
направление движение на противоположное.
Для обеспечения способа управления
повторная подача импульса питающего
напряжения на катушку холостого хода
осуществляется после паузы, в результате
чего боек имеет возможность пройти
точку магнитного равновесия и создать
рабочий воздушный зазор в катушке
холостого хода с противоположной
подпружиненному буферу стороны.
боек, двигаясь по инерции, сжимает
подпружиненный буфер, и изменяет
направление движение на противоположное.
Для обеспечения способа управления
повторная подача импульса питающего
напряжения на катушку холостого хода
осуществляется после паузы, в результате
чего боек имеет возможность пройти
точку магнитного равновесия и создать
рабочий воздушный зазор в катушке
холостого хода с противоположной
подпружиненному буферу стороны.
В
момент времени
![]() подается импульс питающего напряжения
на катушку холостого хода, боек под
действием электромагнитных сил катушки
холостого хода и накопленной потенциальной
энергии подпружиненного буфера ускоренно
перемещается по направлению к рабочему
инструменту.
подается импульс питающего напряжения
на катушку холостого хода, боек под
действием электромагнитных сил катушки
холостого хода и накопленной потенциальной
энергии подпружиненного буфера ускоренно
перемещается по направлению к рабочему
инструменту.
В
момент времени
![]() подается импульс питающего напряжения
на катушку рабочего хода, под действием
электромагнитных сил которой, боек,
получая дополнительное ускорение,
продолжает движение.
подается импульс питающего напряжения
на катушку рабочего хода, под действием
электромагнитных сил которой, боек,
получая дополнительное ускорение,
продолжает движение.
В
момент времени
![]() боек наносит удар по рабочему инструменту
и отскакивает от него, после чего цикл
повторяется. Каждый последующий цикл
после подачи четного числа полуволн
питающего напряжения осуществляется
с паузой между циклами.
боек наносит удар по рабочему инструменту
и отскакивает от него, после чего цикл
повторяется. Каждый последующий цикл
после подачи четного числа полуволн
питающего напряжения осуществляется
с паузой между циклами.
Таким образом, за время рабочего цикла боек получает кинетическую энергию за четыре импульса питающего напряжения: два раза кинетическая энергия бойка увеличивается за счет электромагнитной энергии катушки рабочего хода и два раза за счет электромагнитной энергии холостого хода. Реализация разработанного способа управления обеспечивает повышение энергии единичного удара бойка электромагнитного двигателя.
УДК 621.314.6