

Повышение надежности частотно-регулируемого электропривода ответственных механизмов2 в.Н. Медведев
(Магнитогорский государственный технический университет,
г. Магнитогорск)
Статистика показывает увеличение числа аварийных отключений оборудования, технологические механизмы которого оснащены частотно-регулируемыми приводами(ЧРП) переменного тока. Причиной этого является увеличение длительности перерывов в работе электродвигателей, питаемых от преобразователей частоты (ПЧ), при кратковременных (1-2 с) нарушениях электроснабжения [1]. Автоматическое включение резерва на период паузы не является рациональным решением, а создание собственного быстродействующего АВР проблематично как с точки зрения усложнения схемы электроснабжения, так и внесения проблем в сферу электроснабжения по селективности и равномерности загрузки вводов электропитания.
Низкая устойчивость существующих схем построения ПЧ обусловлена тем, что энергия, накопленная в фильтре звена постоянного тока, недостаточна для поддержания устойчивой коммутации вентилей автономного инвертора, в результате чего происходит отключение ЧРП. Повышение устойчивости ПЧ при кратковременных нарушениях в системе электроснабжения может быть обеспечено за счет совершенствования алгоритмов управления.
Предложен принцип регулирования и разработана серия технических решений, обеспечивающих использование для поддержания тока в электродвигателе энергии собственных вращающихся масс. Однако при этом необходимо исключить торможение двигателя вследствие гашения поля ротора. Это осуществляется за счет отключения его от источника питания на время перерывов электроснабжения, т.е. обеспечения режима свободного выбега.
Основным является способ управления ЧРП, согласно которому при нарушении электроснабжения прерывают рабочий режим управления и снижают с ограниченной скоростью выходную частоту, а при возобновлении электропитания повышают ее и восстанавливают рабочий режим управления [2]. Преобразователь, управляемый по этому способу, при кратковременных нарушениях электроснабжения поддерживает на заданном уровне напряжение звена постоянного тока за счет рекуперации энергии инерционного вращения электродвигателя и сопряженного с ним механизма. Такой способ управления при нарушениях электроснабжения характерен для большинства представленных на российском рынке преобразователей частоты. Его недостаток заключается в следующем. Следствием снижения выходной частоты преобразователя является приложение тормозного момента к ротору электродвигателя. Поэтому электродвигатель и технологический механизм, продолжающие инерционное вращение (с постепенной потерей производительности), замедляют вращение и при восстановлении электроснабжения начинают разгон с меньшей скорости. В результате время разгона механизма до требуемой скорости увеличивается и, соответственно, увеличивается длительность перерыва в нормальной работе механизма. Кроме того повышается вероятность срабатывания технологической защиты оборудования.
Для устранения указанного недостатка в [3] предложен способ управления ЧРП, обеспечивающий улучшение начальных условий разгона электродвигателя и замедлениеснижения скорости технологического механизма. При управлении ПЧ со звеном постоянного тока и инвертором напряжения с широтно-импульсной модуляцией (ШИМ) при нарушении электроснабжения прерывают рабочий режим управления, сохраняют выходную частоту, снижают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне напряжение звена постоянного тока, и запирают инвертор, а после восстановления электроснабжения включают инвертор, повышают выходное напряжение и возобновляют рабочий режим управления. Схемы и принцип работы устройств, реализующих способ, представлены в [3, 4].
Способ имеет развития и уточнения для частных случаев его реализации, состоящих в том, что:
– момент запирания инвертора устанавливают путем отсчета заданной задержки от момента снижения выходного напряжения до заданной величины или от момента фиксации нарушения электроснабжения;
– после восстановления электроснабжения выходную частоту устанавливают равной или пропорциональной ее сохраненному значению или в соответствии с фактической частотой;
– после восстановления электроснабжения повышают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне пусковой ток электродвигателя, питаемого преобразователем.
Наряду с разработанными техническими решениями разработан способ, направленный на уменьшение времени перезапуска ЧРП, т.е.повторного пуска двигателя без бросков тока после провала или кратковременного отключения напряжения в системе электроснабжения. Суть способа заключается в вычислении мгновенной скорости вращения ротора электродвигателя непосредственнос момента поступления сигналаоб отсутствии напряжения в системе электроснабжения. Функциональная схема устройства, реализующего предложенный способ, представлена на рисунок 1.
Благодаря дополнительному блоку вычисления момента инерции ротора, блоку вычисления скорости вращения ротора, датчику состояния обратного клапана вычисление мгновенной скорости вращения ротора электродвигателя начинаетсяс момента поступления вышеназванного сигнала с датчика об отсутствии напряжения в системе электроснабжения. К моменту подачи напряжения на вход ПЧ расчетная скорость вращения ротора известна, поэтому время, которое необходимо на поиск частоты напряжения инвертора, сводится к нулю. При этоминвертор напряжения осуществляет плавноенарастание выходного напряжения до уровня, соответствующего найденной частоте с соблюдением соотношения Uном/fном = const. Общее время перезапуска ЧРП после нарушения электроснабжения сокращается, в результате чего повышается надежность работы электропривода и приводного механизма.
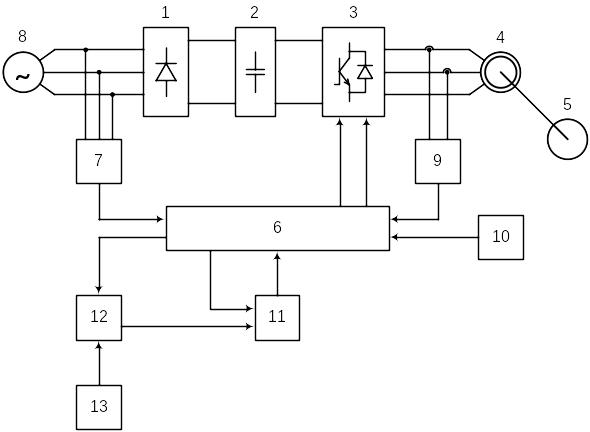
1 – выпрямитель; 2 – звено постоянного тока; 3 – инвертор напряжения; 4 – двигатель;
5 – приводной механизм; 6 – блок управления; 7 – датчик нарушения электроснабжения;
8 – система электроснабжения; 9 – датчик тока ПЧ; 10 – датчик технологического параметра; 11 – блок вычисления скорости вращения ротора; 12 – блок вычисления момента инерции ротора; 13 – датчик состояния обратного клапана
Рисунок 1 – Устройство управления ЧРП с ШИМ для ответственных механизмов
Рассмотренная система управления получила развитие, суть которого поясняется схемой на рисунке 2. Благодаря выключателю, который выполняет функцию «байпаса», скорость вращения электродвигателя после кратковременного нарушения электроснабжениявосстанавливается за меньшее время. Одновременно в блоке управления по параметрам математической модели электродвигателя, показаниям датчика тока, датчика скорости и датчика напряжения вычисляется положение пространственного вектора поля статора. По положению вектора вычисляются значения управляющих сигналов частоты f(t) и напряжения u(t) для инвертора напряжения, который подхватывает вращающийся электродвигатель без бросков тока при переключении его от сети на преобразователь частоты.
Общее время перезапуска сокращается, что снижает чувствительность электропривода к кратковременным нарушениям электроснабжения и повышает его надежность.
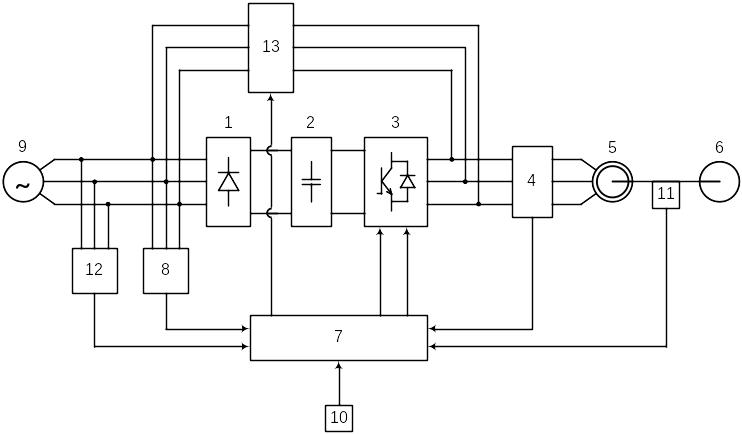
1 – выпрямитель; 2 – звено постоянного тока; 3 – инвертор напряжения; 4 – датчик тока;
5 – двигатель; 6 – приводной механизм; 7 – блок управления; 8 – датчик нарушения электроснабжения; 9 – система электроснабжения; 10 – датчик технологического параметра; 11 – датчик скорости электродвигателя; 12 – датчиком напряжения; 13 – выключатель
Рисунок 2 – Усовершенствованное устройство управления ЧРП с ШИМ
В целомразработанные способы и устройстваобеспечиваютповышение надежности работыЧРП ответственного механизма при кратковременных нарушениях электроснабжения, обеспечивают перезапуск преобразователя частоты на вращающийся двигатель за минимальноевремя после восстановления напряжения в системе электроснабжения.
СПИСОК ЛИТЕРАТУРЫ
Способы повышения устойчивости частотно-регулируемых электроприводов при нарушениях электроснабжения /Г.П. Корнилов, Т.Р. Храмшин, О.И. Карандаева и др. // Вестник МГТУ – Магнитогорск: ГОУ ВПО «МГТУ», 2011. № 4. – С. 79–84.
Компания Emotron. Преобразователь частоты. Руководство по эксплуатации. – 2004 г.
Способ управления преобразователем частоты при нарушениях электроснабжения / А.А. Ионов, Ю.А. Крылов, А.Н. Ремезов, В.Н. Медведев и др. // Патент РФ № 2344538, МПК H02P 1/00. Опубл. 2009. Бюл. №2.
Преобразователь частоты / А.А. Ионов, Ю.А. Крылов, А.Н. Ремезов, В.Н. Медведев и др. // Патент РФ № 72589, МПК H02P 27/08. Опубл. 2008. Бюл. №11.
УДК 621.313.32; 621.31-83-52; 62-83