

Построение цифроуправляемых функциональных преобразователей для систем автоматизированных электроприводов в.М. Сапельников, м.И. Хакимьянов
(Уфимский государственный нефтяной технический университет, г. Уфа)
Развитие современных средств автоматизации требует создания широкого спектра прецизионных регулируемых электроприводов. Во многих областях высокоточной техники требуется не просто регулировать скорость вращения электродвигателя, но и обеспечивать изменение скорости по определенным законам или обеспечивать необходимый угол поворота вала в заданные моменты времени.
Такие прецизионные регулируемые электроприводы требуются в робототехнике, системах поиска дефектов в трубопроводах и многих других областях. Еще одно применение таких систем в нефтяной промышленности – это создание манипуляторов для механизации спуско-подъемных операций в буровых установках и комплексах текущего и капитального ремонта скважин.
Традиционно при создании «интеллектуальных» электроприводов используются специализированные однокристальные микроконтроллеры, базирующиеся на цифровых сигнальных процессорах(DSP). Эти микроконтроллеры, изначально ориентированные на использование в автоматизированном электроприводе, обладают широким набором периферийных устройств для сопряжения с объектами управления и могут решать большой круг задач управления параметрами движения исполнительного механизма[1].
Однако такой подход не позволяет создавать системы управления, полностью адаптированные к требованиям конкретной задачи. Это обусловлено, во-первых, фиксированным набором встроенных периферийных устройств, и, во-вторых, программной реализацией математических функций.Известно, что программная реализация математических функций в значительной мере снижает быстродействие системы.
Повысить быстродействие и точность позиционирования систем автоматизированного электропривода можно используя аппаратную реализацию математических функций в функциональных цифроаналоговых и аналогово цифровых преобразователях (ФЦАП и ФАЦП).
На рисунке 1 показана схема ФЦАП для реализации математической функции квадратного корня. Такой ФЦАП состоит из двух линейных ЦАП, на цифровые входы которых подается одинаковый входной код, но аналоговый выход ЦАП1 соединен со входом опорного напряжения ЦАП2 Uоп.2.
Рисунок 1 – ФЦАП, реализующий математическую функцию извлечения квадратного корня из входного кода
Работает такой ФЦАП следующим образом. На выход ЦАП1 поступает напряжение, пропорциональное входному коду N:
![]() ,
,
где UОП.1 – опорное напряжение, подаваемое на вход схемы, и, соответственно, на ЦАП1;
NМАКС. – максимальный код ЦАП.
Напряжение на выходе ЦАП2 будет уже пропорционально опорному напряжению UОП.2, которое равно UВЫХ.1:
![]() .
.
Таким образом, отношения кодов будут пропорциональны квадратному корню из отношений напряжений:
 .
.
Аналогичным образом можно построить ФЦАП для извлечения корня любой степени, соединяя последовательно несколько ЦАП и подавая на вход опорного напряжения каждого выходное напряжение от предыдущего ЦАП [2, 3].
Другой класс цифроуправляемых преобразователей, которые используются в системах управления электроприводами, это устройства формирования и регулирования фазового сдвига.
Функциональная схема фазосдвигающего устройства (ФСУ) в общем виде показана на рисунке 2. Фазосдвигающее устройство содержит устройство синхронизации с сетью С, генератор развертки ГР и пороговое устройство (нуль-орган) НО. На вход НО подается кроме опорного напряжения Uоп сигнал управления Uy. В общем случае напряжение Uy может подаваться через специальное входное устройство, осуществляющее согласование параметров сигнала управления со входом ФСУ.
В момент равенства опорного напряжения Uoп и напряжения управления Uy пороговое устройство переключается и формирователь импульсов ФИ в этот же момент времени выдает управляющий импульс. Все перечисленные элементы могут иметь различное исполнение и отличаться по принципу работы.
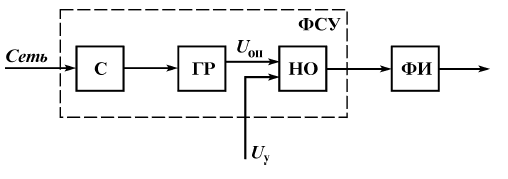
Рисунок 2 – Структурная схема фазосдвигающего устройства
Структурная схема цифроуправляемого калибратора фазы представлена на рисунке 3. Принцип действия устройства заключается в суммировании двух синусоидальных напряжений, сдвинутых одно относительно другого на угол 90° [4].
Выходное напряжение UВЫХ является суммой двух синусоидальных напряжений US и UC, сдвинутых одно относительно другого на 90°.
Рисунок 3 – Цифроуправляемый калибратор фазы с линейным преобразованием управляющего кода в фазовый сдвиг
Напряжений US и UC формируются из входного синусоидального напряжения UВХ цепью каскадно-включенных преобразователей ЦАП1-ЦАП7 и инвертирующими сумматорами А1-А4.
Передаточная функция i-го ЦАП Hi(θ)выражается линейной зависимостью:
![]() ,
,
где bi – масштаб преобразования i-го ЦАП;
![]() ;
;![]() .
.
Передаточную функцию nкаскадно-включенных ЦАП можно записать в виде:
![]() .
.
Погрешность такого калибратора фазы будет главным образом определяться погрешностью настройки ЦАП на заданный масштаб преобразования, паразитными фазовыми сдвигами в ЦАП и сумматорах на высоких частотах, а также точностью поддержания фазового сдвига 90°.
Такие цифроуправляемые функциональные преобразователи могут найти широкое применение в системах управления для прецизионного и быстродействующего электропривода, в быстродействующих измерительных системах, в робототехнике, а также при создании автоматизированных манипуляторов для механизации спуско-подъемных операций в буровых установках и комплексах ремонта скважин.
Таким образом, могут быть сделаны следующие выводы:
1 Применение ФЦАП позволяет проектировать системыуправления электроприводами, полностью адаптированные к требованиям конкретной задачи.
2 Использование в системах управления электроприводами ФЦАП позволяет значительно повысить быстродействие и точностные характеристики проектируемых электроприводов.
СПИСОК ЛИТЕРАТУРЫ
1 Фалеев М.В., Кашин А.В., Самок С.Г.Импульсно-фазовые электроприводы с цифровымуправлением // «Вестник ИГЭУ». Вып. 3. 2005. C. 74-81.
2 ОпадчийЮ.Ф. и др.Аналоговая и цифровая электроника (полный курс): Учебник для вузов / Ю.Ф.Опадчий, О.П. Глудкин, А.И. Гуров: Под. ред. О.П. Глудкина.- М.: Горячая Линия – Телеком,2002.- С. 750-751.
3 Федорков Б.Г., ТелецВ.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение.- М.: Энергоатомиздат, 1990.- С. 68-71.
4 Сапельников В.М., Кравченко С.А., Чмых М.К. Проблемы воспроизведения смещаемых во времени электрических сигналов и их метрологическое обеспечение / Изд-е Башкирск. гос. ун-та.- Уфа, 2000.- 196 с.
УДК 621.311.4