

2.2 Метод Ейлера
Однокрокові методи призначені для розв’язування диференціальних рівнянь першого порядку виду
 (1.1)
(1.1)
Метод Ейлера є найпростішим методом розв’язування задачі Коші. Він дозволяє інтегрувати ДР першого порядку. Точність його не велика.
Тобто крива заміняється дотичними. Рух відбувається не по інтегральній кривій, а по відрізках дотичної .
Метод
Ейлера базується на розкладі функції
 в ряд Тейлора в околі точки
в ряд Тейлора в околі точки


 (1.2)
(1.2)
Якщо
 мале, то, члени розкладу, що містять в
собі
мале, то, члени розкладу, що містять в
собі
 і т.д. є малими високих порядків і ними
можна знехтувати.
і т.д. є малими високих порядків і ними
можна знехтувати.
Тоді
 (1.3)
(1.3)
Похідну знаходимо з рівняння (1.1), підставивши
в нього початкову умову. Таким чином
можна знайти наближене значення залежної
змінної при малому зміщенні
від початкової точки. Цей процес можна
продовжувати, використовуючи
співвідношення.
знаходимо з рівняння (1.1), підставивши
в нього початкову умову. Таким чином
можна знайти наближене значення залежної
змінної при малому зміщенні
від початкової точки. Цей процес можна
продовжувати, використовуючи
співвідношення.
 ,
,
роблячи як завгодно багато кроків.
Похибка
методу має порядок
 ,
оскільки відкинуті члени, що містять
в другій і вище степенях.
,
оскільки відкинуті члени, що містять
в другій і вище степенях.
Недолік методу Ейлера - нагромадження похибок, а також збільшення об’ємів обчислень при виборі малого кроку з метою забезпечення заданої точності.
В
методі Ейлера на всьому інтервалі h
тангенс кута нахилу дотичної приймається
незмінним і рівним
 .
Очевидно, що це призводить до похибки,
оскільки кути нахилу дотичної в точках
.
Очевидно, що це призводить до похибки,
оскільки кути нахилу дотичної в точках
 та
та
 різні. Точність методу можна суттєво
підвищити, якщо покращити апроксимацію
похідної.
різні. Точність методу можна суттєво
підвищити, якщо покращити апроксимацію
похідної.
Це можна зробити, якщо, наприклад, використати середнє значення похідної на початку та в кінці інтервалу. В т.з. модифікованому методі Ейлера (метод Ейлера з перерахунком) спочатку обчислюється значення функції в наступній точці за звичайним методом Ейлера.
 (1.4)
(1.4)
Воно
використовується для обчислення
наближеного значення похідної в кінці
інтервалу
 .
.
Обчисливши
середнє між цим значенням похідної та
її значенням на початку інтервалу,
знайдемо більш точне значення
 :
:
 (1.5)
(1.5)
Принцип модифікованого методу можна пояснити інакше. Якщо в розкладі в ряд Тейлора зберегти член з
 (1.6)
(1.6)
Замість
другої похідної
 можна використати наближення кінцевою
різницею
можна використати наближення кінцевою
різницею
 (1.7)
(1.7)

 .
.
Підставивши (1.7) в (1.6) одержимо
 (1.8)
(1.8)
Що
співпадає по формі з (5). Відмінність між
( 1.8) та (1.5): в (1.5) точне значення похідної
 замінимо на
замінимо на
 .
Похибка при такій заміні має порядок
.
Похибка при такій заміні має порядок
 .
.
Відмітимо, що за підвищення точності доводиться платити додатковими затратами машинного часу.
В обчислювальній практиці використовується також метод Ейлера-Коші з ітераціями:
знаходиться грубе початкове наближення (за звичайним методом Ейлера)

будується ітераційний процес
 (1.9)
(1.9)
Ітерації
продовжують до тих пір, доки два послідовні
наближення не співпадуть з заданою
похибкою
 .
Якщо після декількох ітерацій співпадання
нема, то потрібно зменшити крок
.
.
Якщо після декількох ітерацій співпадання
нема, то потрібно зменшити крок
.

Тобто в модифікованому методі Ейлера, в методі Ейлера-Коші з ітераціями спочатку (на першому етапі) знаходиться наближення для , а потім воно вже коригується за формулами (5) або (9).
РОЗДІЛ 3
3.1 Постановка задачі.
Дослідимо систему Чуа розв’язавши систему лінійних диференціальних рівнянь методом Ейлера.
3.2 Вибір способу реалізації.
Було обрано спосіб реалізації в об’єктно орієнтованому середовищі Qt на операційній системі Linux Ubuntu 12.04 . При реалізації використовується метод Ейлера для розв’язання системи лінійних диференціальних рівнянь.
3.3 Результат.
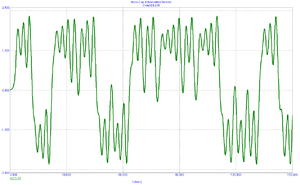
Було проведено декілька дослідів, перший з константами за яких виконується ланцюг Чуа, інші три зі зміненими константами для того щоб виявити як поводить себе система при змінах різних початкових даних.
1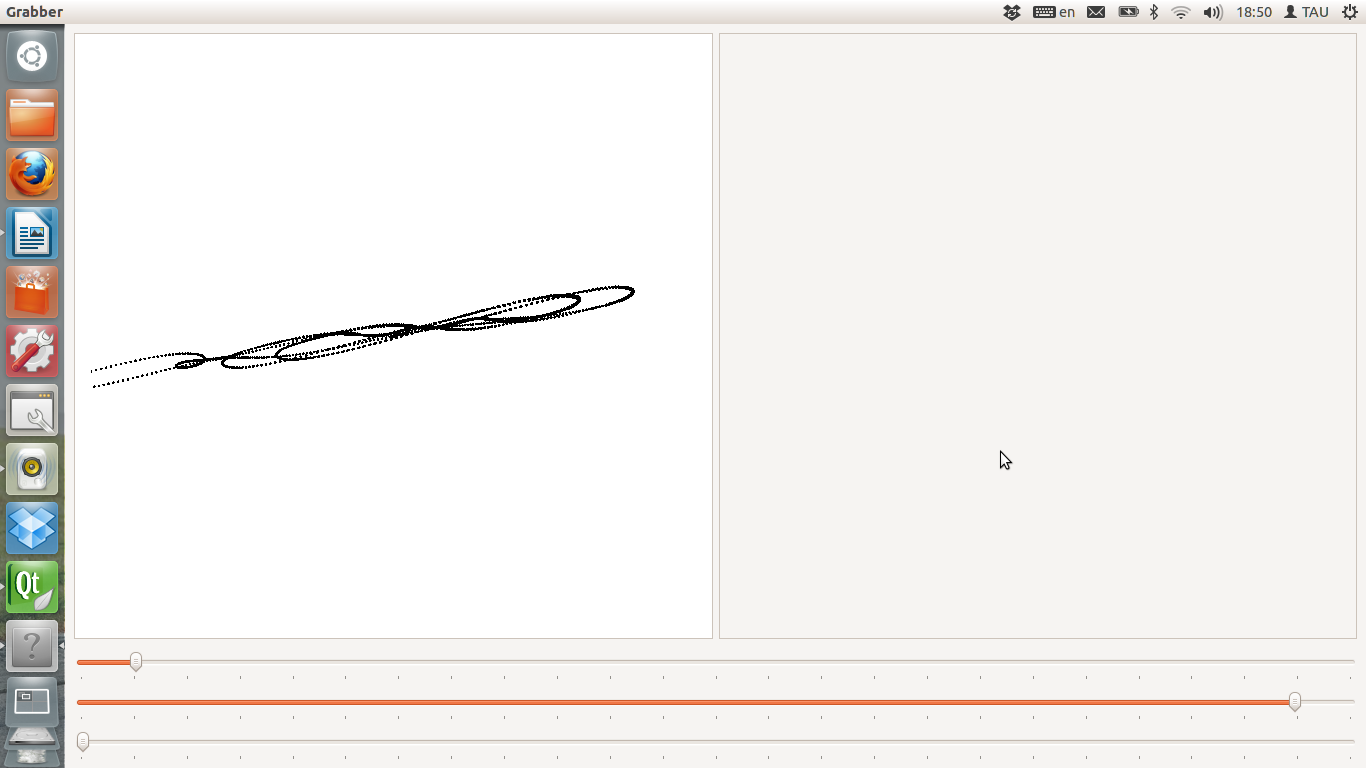 .
.
float c1=1/9;
float c2=1.0f;
float l=1/7;
float ga=-0.8f;
float gb=-0.5f;
float g=0.7f;
float alpha=9;//c2/c1;
float beta=1*7/(0.7*0.7)
На рисунках показані часові залежності коливань, що виявляються даною системою.
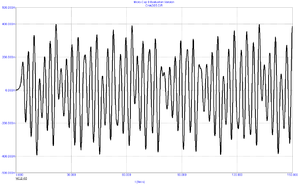
У випадку 2, 3, 4 були змінені деякі константи для того щоб дослідити як змінюється поведінка системи та до яких констант найбільш чутлива.
2. Була змінена константа ga з -0,8 на -0,7
f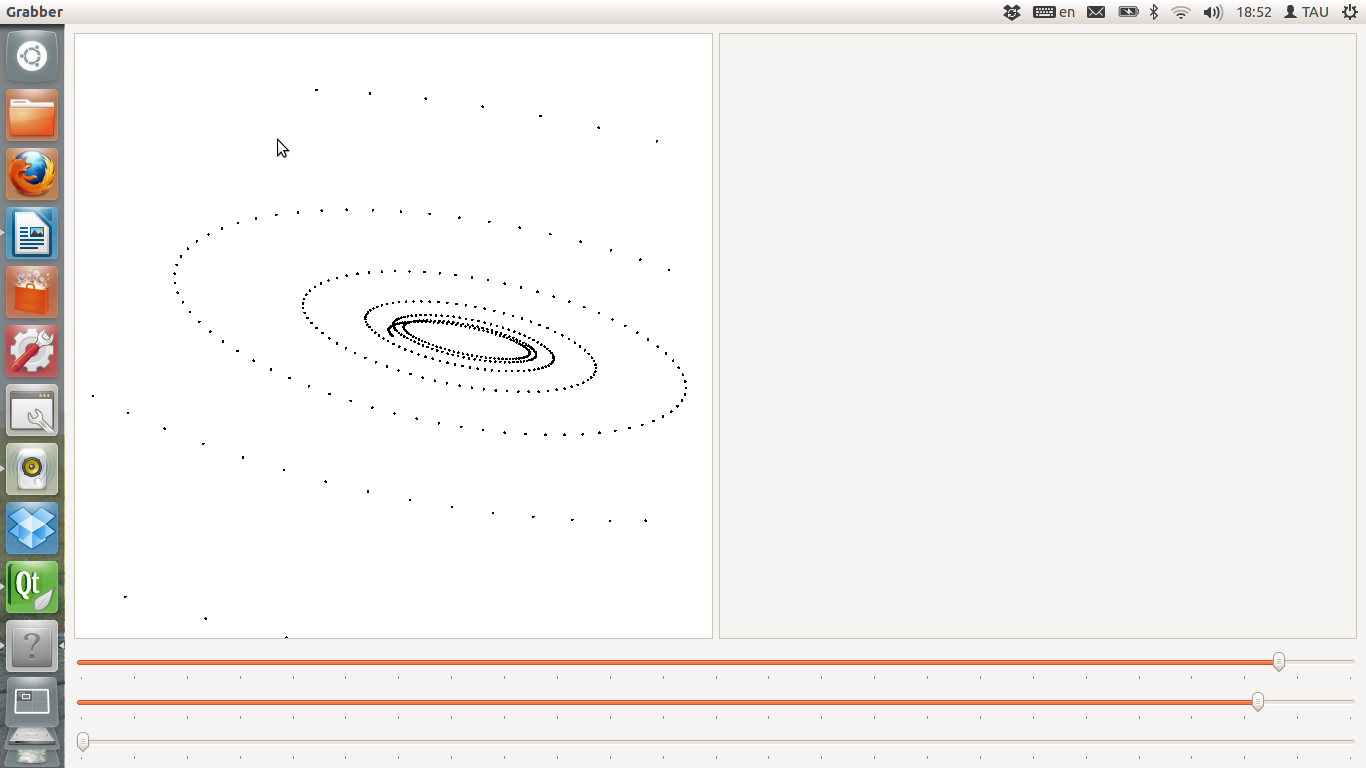 loat
c1=1/9;
loat
c1=1/9;
float c2=1.0f;
float l=1/7;
float ga=-0.7f;
float gb=-0.5f;
float g=0.7f;
float alpha=9;//c2/c1;
float beta=1*7/(0.7*0.7);
3 .Стала ga була відновлена до початкової і змінена c2 з 1 на 1,2
float c1=1/9;
float c2=1.2f;
float l=1/7;
float ga=-0.8f;
float gb=-0.5f;
float g=0.7f;
float alpha=9;//c2/c1;
float beta=1*7/(0.7*0.7);
4.
float c1=1/9;
float c2=1.0f;
float l=1/7;
float ga=-0.8f;
float gb=-0.4f;
float g=0.7f;
float alpha=9;//c2/c1;
float beta=1*7/(0.7*0.7);