

Вопрос 2. Регулярные методы оптимизации: динамическое программирование. Принцип оптимальности Беллмана и рекуррентное соотношение. Примеры задач управления запасами.
Метод динамического программирования
Данный метод, разработанный Р. Беллманом, позволяет решать вариационные задачи при сложном виде возможных управлений. Он получил широкое применение при решении транспортных задач, задач распределения ресурсов, замены оборудования и т.д. При проектировании метод динамического программирования может быть использован для оптимизации конфигураций деталей, если их поверхность представлена как некоторая траектория в пространстве.
Метод динамического программирования отвечает тому естественному ходу человеческой мысли, который был выработан эволюцией. Подобные методы оптимизации, основанные на идее последовательного анализа вариантов, в большой степени используют природу изучаемых задач.
В основе метода лежит сформулированный Р. Беллманом принцип оптимальности. Этот принцип верен для тех систем, последующее движение которых полностью определяется их
состоянием в текущий момент времени. К таким системам относятся, например, управляемые системы, т.е. системы, аналогичные тем, для которых вводится принцип максимума.
Принцип оптимальности отражает важнейшие особенности задач оптимального управления. Его суть можно объяснять по-разному. Ввиду его важности приведем несколько формулировок.
Первая формулировка. Если управление оптимально, то, каковы бы ни были первоначальное состояние системы и управление системой в начальный момент времени, последующее управление оптимально относительно состояния, которое система примет в результате начального управления.
Указанное свойство - одно из основных, для процессов марковского типа, т.е. процессов, будущее поведение которых полностью определяется состоянием и управлением в настоящее время.
Вторая формулировка. Оптимальное управление в любой момент времени не зависит от предыстории системы и определяется только состоянием системы в этот момент и целью управления.
Е![]() ще
один вариант принципа оптимальности
дадим для за-дачи оптимального управления
с фиксированным временем и свободным
правым концом. Пусть закон движения
описывается автономной системой
дифференциальных уравнений (6.25), причем
заданы начальный t1
и
конечный t2
моменты
времени, а также начальное состояние
x(t1)
=
х1
. Целевой
функционал определим следующим
образом:
ще
один вариант принципа оптимальности
дадим для за-дачи оптимального управления
с фиксированным временем и свободным
правым концом. Пусть закон движения
описывается автономной системой
дифференциальных уравнений (6.25), причем
заданы начальный t1
и
конечный t2
моменты
времени, а также начальное состояние
x(t1)
=
х1
. Целевой
функционал определим следующим
образом:
Третья формулировка. Начиная с любого момента времени t'ϵ[t1,t2] участок оптимальной траектории также является оптимальной траекторией.
Другими словами, каково бы ни было положение точки x*(t') на оптимальной фазовой траектории, ее участок от точки х*( t')участок 2 на рис. 6.10) тоже является оптимальной траекторией.
Что же касается участка 1 оптимальной траектории до точки x*(t'), то можно утверждать, что этот участок есть оптимальная траектория, когда точка x*(t') - х' является фиксированной, т.е. когда по условию задачи допустимая траектория обязательно должна проходить через точку х'. Если же задана только начальная точка x*(t1) - x1, то участок 1 оптимальной траектории сам по себе может и не быть оптимальной траекторией, т.е. может не доставлять минимум целевому функционалу в задаче со свободным правым концом.
Т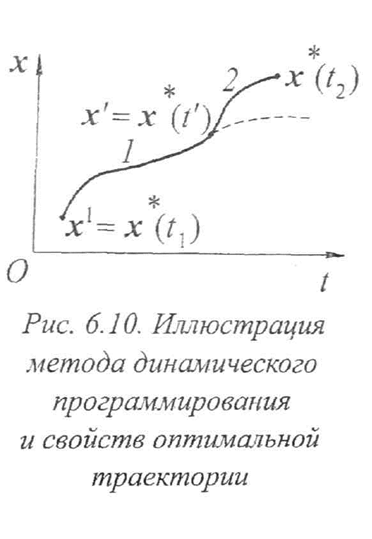 аким
образом, важно иметь в виду, что принцип
оптимальности относится к последующему
за данным состоянием движению системы,
но может нарушаться для движения,
предшествующего данному состоянию.
Следовательно, нужно подчеркнуть,
что принцип оптимальности не может быть
распространен на любой участок
траектории движения.
аким
образом, важно иметь в виду, что принцип
оптимальности относится к последующему
за данным состоянием движению системы,
но может нарушаться для движения,
предшествующего данному состоянию.
Следовательно, нужно подчеркнуть,
что принцип оптимальности не может быть
распространен на любой участок
траектории движения.
О тметим
еще одну особенность оптимального
управления, вытекающую из принципа
оптимальности: выбор оптимального
управления определяется лишь состоянием
системы в текущий момент времени Если
в какой-то период времени управление
было не оптимальным, то последствия
этого в будущем исправить уже нельзя
тметим
еще одну особенность оптимального
управления, вытекающую из принципа
оптимальности: выбор оптимального
управления определяется лишь состоянием
системы в текущий момент времени Если
в какой-то период времени управление
было не оптимальным, то последствия
этого в будущем исправить уже нельзя
Билет №15
Регулярные методы оптимизации: линейное программирование. Виды исследуемых функций, общая постановка и примеры задач.
ЛП- неточный перевод – пл-е на осн-е линейных соотн-ий.
F(x)=c1x1+c2x2+…+cnxn=(сбч)ю «nf a-z не ограничена, поэтому искать ее мах, не налагая ограничений на обл-ь изм-я вектора х, бессмысленно.. стесним вектор х многогранникомиз линейных равенств и неравенств. Тогда нужно найти величины х1, хn, доставляющие экстремум ф-ии.
Задача о выборе оптимального плана (выпуск с макс эф-ностью или мин затратами). Транспортная задача (наиб экономичный маршрут перевозки Т от складов к магазинам с учетом кол-ва). Отл-ся двойной индексацией переменных
Основы теории надёжности: определение вероятности безотказной работы, свойства функции вероятности безотказной работы и её графическое представление.
ВБР – в-ть того, что в пределах заданной наработки отказ объекта не возникнет. Если Т – время непрерывной исправно А; t – время, за кот необх опр-ть ВБР, то ВБР: P(t)= P{T>=t},t>=0. Св-ва ФВБР: 1) 0<=P(t)<=1; 2) ф-я P(t) – невозрастающая ф-я своего аргумента, т.е. если t2>t1, то P(t2)<=P(t1); 3) P(0)=1, P(∞)=0. Из 3):в-ть безотказной А опр-ся в предположении, что в нач момент т-и исчисления наработки об-т был работоспособен. + фото 7 (с 122-123 б)
Билет 16. Вопрос 1. Регулярные методы оптимизации: симплекс-метод решения задач линейного программирования.
Для линейных моделей может быть предложен детерминированный метод перебора возможных решений, позволяющий за конечное число итераций найти точное оптимальное решение. По существу, при этом происходит последовательное исследование вершин некоторого полиэдрального множества, в связи с чем этот метод известен под названием симплекс-метода [10,24].
Предварительный анализ задачи линейного программирования показывает, что для поиска оптимального решения необходимо включить ограничения в функцию цели, а затем найти оптимальные значения переменных.
В
общем случае эта задача не является
тривиальной. Симплекс-метод
предусматривает построение некоторого
возможн ого
базисного
решения
(предполагается, что множество допустимых
решений не пусто и, значит, какие-то
решения возможны)
и
его последовательное улучшение. Изложение
метода целесообразно начать с
рассмотрения простого примера.
ого
базисного
решения
(предполагается, что множество допустимых
решений не пусто и, значит, какие-то
решения возможны)
и
его последовательное улучшение. Изложение
метода целесообразно начать с
рассмотрения простого примера.
Рассмотрим задачу линейного программирования: найти минимум функции
![]()
Формально изложенный метод сводится к выполнению следующих этапов.
1. В соответствии с числом ограничений вводятся дополнительные свободные переменные и задается первоначальное базисное решение, включающее в себя нулевые действительные переменные и ненулевые свободные переменные.
2. Проверяется возможность улучшения плана (симплекс-критерий I). Если улучшение возможно, осуществляется переход I процедуре 3. Если улучшение невозможно, решение считается окончательным (оптимальным) и вычисления прекращаются.
З. В соответствии с симплекс-критерием II выбирается путь улучшения плана, т.е. новая базисная переменная, и определяется ее максимально допустимое значение. Одновременно определяется переменная, которую нужно исключить из базиса.
4. Изменяется базисное решение. Преобразуется система уравнений задачи, после чего осуществляется переход к процедуре 2.
Как уже отмечалось, задачи линейного программирования могут иметь множество равнозначных оптимальных решении. Симплекс-метод гарантирует получение одного из этих решений. Сама процедура симплекс-метода неоднозначна. Определенный произвол заключен как в выборе первоначального базисного решения, так и пути совершенствования этого решения. В частности, в рассмотренном примере при первоначальном улучшении по переменной х будет получено равнозначное (6.88) оптимальное решение (точка IV на рис. 6.12). I

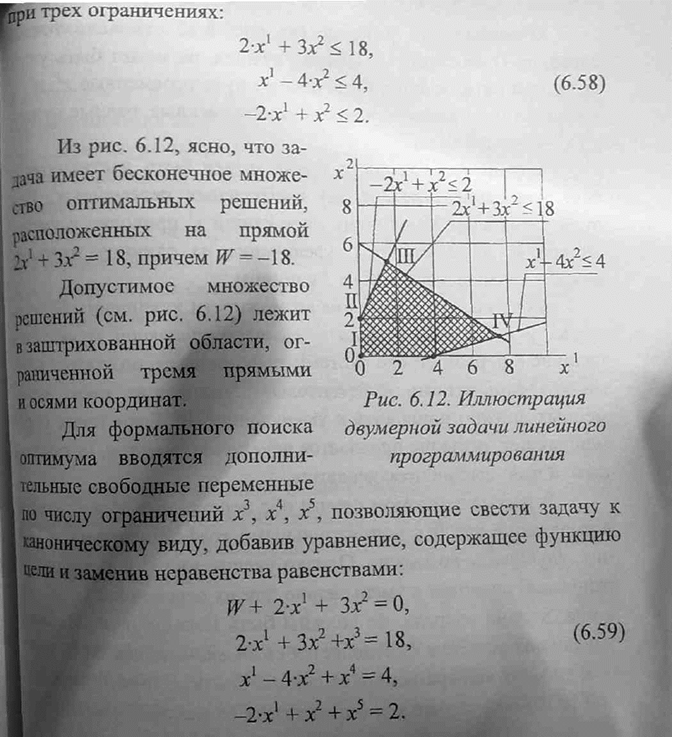
В тех случаях, когда линейная модель имеет более одного оптимального решения, она имеет бесконечное число таких решений. При этом можно показать, что любое положительно взвешенное среднее двух оптимальных решений тоже является эквивалентным оптимальным решением. Для рассмотренного примера будут оптимальны все значения х1 и х2, отвечающие
Тот факт, что конечное оптимальное решение задачи линейного программирования, полученное с помощью симплекс-метода, всегда должно быть ассоциировано с допустимым базисным решением, является тонкой особенностью симплекс -метода. Бели задача имеет одно ограничение, то независимо от числа видов производственной деятельности (переменных), включенных в модель, заранее известно, что в оптимальном решении положительное значение может иметь только одна из этих переменных. Если добавляется еще одно ограничение, не являющееся избыточным, то положительное значение могут
????????????????????????????????????????????????????????? стр 269