

Вопрос 2. Теория принятия решений: общие положения и область применения. Ситуация выбора решения. Факторы выбора альтернатив и этапы процесса принятия решений.
Т ЕОРИЯ
ПРИНЯТИЯ РЕШЕНИЙ 5.2.1. Основные положения
ЕОРИЯ
ПРИНЯТИЯ РЕШЕНИЙ 5.2.1. Основные положения
Т еория
принятия решений рассматривает задачи,
где существует необходимость принимать
решения в ситуациях, для которых не
удается полностью учесть определяющие
их условия, а также последующее их
влияние.
еория
принятия решений рассматривает задачи,
где существует необходимость принимать
решения в ситуациях, для которых не
удается полностью учесть определяющие
их условия, а также последующее их
влияние.
Теория принятия решений представляет собой набор понятий и систематических методов, позволяющих всесторонне анализировать проблемы принятия решений в условиях неопределенности.
Под ситуацией выбора решения следует понимать все элементы задачи, такие, как состояния исходных данных, варианты решения и их последствия, а также все оказывающие существенное влияние на решение внешние факторы как объективного, так и субъективного характера.
В основе теории принятия решений лежит предположение о том, что выбор альтернатив должен определяться двумя факторами: 1) представлениями лица, принимающего решение о вероятностях различных возможных исходов (последствий), которые могут иметь место при выборе того или иного варианта решения; 2) предпочтениями, отдаваемыми им различным возможным исходам.
Варианты решения определяются, главным образом, параметрами системы или процесса. Факторы, влияющие на принятие решения, находятся в диапазоне от крайне субъективных, определяемых компетенцией и осведомленностью принимающего решение и проявляющихся в ускоренном выборе или затягивании решения, до таких объективных условий, как технические данные, характеристики, методы и всевозможные вспомогательные средства. По затраченным для обработки средствам решения можно разбить на три группы: 1) эмпирические; 2) опирающиеся на некоторые количественные сравнительные оценки; 3) принятые на основании построенной с исчерпывающей полнотой модели.
Для удобства изложения выделим четыре важных этапа процесса принятия решений.
1. Определение альтернативных способов действия. Должен быть задан подходящий набор целей и указаны соответствующие им меры эффективности;
2. Описание вероятностей возможных исходов. При этом требуется, чтобы неопределенность, связанная с альтернативными решениями, была выражена численно через распределение вероятностей. В результате такой операции становится известной вероятность каждого возможного исхода для каждого принятого решения,
Ранжирование предпочтений возможных исходов через их полезность. Для этого выбирают меру эффективности, а затем с ее помощью представляют в числовой форме отношение лица, принимающего решение, к возможным последствиям решения и вероятности возможных исходов.
Рациональный синтез информации, полученной на первых трех этапах. Следует проанализировать и эффективно использовать всю полученную информацию для того, чтобы решить, какой из возможных альтернатив следует отдать предпочтение.
?????????????????????????????????????????????
Билет №12
Минимаксный критерий принятия решений: характеристика проектной ситуации и правило выбора варианта решения. Фото 7 (с 209 б)
Ищем
в-т с макс знач-ем рез-та (мах еi),
считаем, что оц-и еi
хар-т такие вел-ны, как выигрыш.Выбор
оптим в-та производим с пом критерия
 :
Мн-во Е0
оптимальных в-тов сост из тех Еi0
, кот принадлежат мн-ву Е всех в-тов и
оц-а еi0
кот-х максимальна среди всех оц-к еi.
:
Мн-во Е0
оптимальных в-тов сост из тех Еi0
, кот принадлежат мн-ву Е всех в-тов и
оц-а еi0
кот-х максимальна среди всех оц-к еi.
Взаимосвязь между основными единичными показателями надёжности: вероятностью безотказной работы, средней наработкой на отказ и интенсивностью отказов (-характеристикой).
ВБР – в-ть того, что в пределах заданной наработки отказ объекта не возникнет. Если Т – время непрерывной исправно А; t – время, за кот необх опр-ть ВБР, то ВБР: P(t)= P{T>=t},t>=0
СНО
– отн-е наработки восстанавливаемого
об-а к математическому ожиданию числа
его отказов в течение этой наработки.


ИО – отн-е числа отказов об-ов в ед-у т-и к среднему числу об-ов, продолжающих исправно работать в данный инт-л т-и.
Все они хар-т надежность невосстанавливаемых об-ов. (для восстанавливаемых наработка рассм-ся только до 1-го отказа) (с 122-130 б)
Билет 14. вопрос 1. Методы многомерной оптимизации: покоординатного спуска и градиентный.
2. Методы покоординатного спуска (метод Гаусса-Зейделя) (иногда их называют релаксационными методами). Эти методы предусматривают последовательную циклическую оптимизацию по каждой из варьируемых переменных х1.
Направление движения к экстремуму выбирается поочередно вдоль каждой из координатных осей управляемых параметров х1
Р![]() ассмотрим
процесс поиска экстремума целевой
функции W(X)
для
n-мерной
задачи оптимизации при X
=
(х1,
х2,…хn).
Предположим, что осуществляется поиск
минимума функции W(х).
Тогда
улучшению ее на шаге (k
+ 1) поиска будет соответствовать условие
ассмотрим
процесс поиска экстремума целевой
функции W(X)
для
n-мерной
задачи оптимизации при X
=
(х1,
х2,…хn).
Предположим, что осуществляется поиск
минимума функции W(х).
Тогда
улучшению ее на шаге (k
+ 1) поиска будет соответствовать условие
И
![]() з
выбранной начальной точки поиска Х0
выполняется
пробный шаг h0
в
положительном направлении одной из
координатных осей (обычно вдоль оси
первого управляемого параметра х1).
В
новой точке Х1
с
координатами Х1
=
(x1,1=x1,0+h0,x2,1=x2,0,…xn,0=xn,0)
вычисляется значение целевой функции
W(Х)
и
сравнивается с ее значением в начальной
точке W(X0).
Если
W(X1)
< W(X0)
это
направление принимается для осуществления
дальнейшего пошагового движения к
экстремуму в соответствии с выражением
з
выбранной начальной точки поиска Х0
выполняется
пробный шаг h0
в
положительном направлении одной из
координатных осей (обычно вдоль оси
первого управляемого параметра х1).
В
новой точке Х1
с
координатами Х1
=
(x1,1=x1,0+h0,x2,1=x2,0,…xn,0=xn,0)
вычисляется значение целевой функции
W(Х)
и
сравнивается с ее значением в начальной
точке W(X0).
Если
W(X1)
< W(X0)
это
направление принимается для осуществления
дальнейшего пошагового движения к
экстремуму в соответствии с выражением
В противном случае производится, возврат в исходную точку Х0 и движение осуществляется в отрицательном направлении оси х1:
![]()
Движение в выбранном направлении оси х1 выполняется до тех пор, пока целевая функция улучшается, т.е. выполняется условие (6.97). При его нарушении на шаге (k + 1) производится возврат в точку x1,k, определяется направление движения вдоль следующей координатной оси x2 и совершаются спуски в направлении, обеспечивающем улучшение целевой функции.
![]()
П![]() осле
осуществления спусков вдоль всей п
осей
первый цикл спусков
N=
1
завершается и начинается новый цикл
N=2.
Если на очередном цикле движение
оказалось невозможным ни по одной из
осей, тогда уменьшается шаг поиска:
осле
осуществления спусков вдоль всей п
осей
первый цикл спусков
N=
1
завершается и начинается новый цикл
N=2.
Если на очередном цикле движение
оказалось невозможным ни по одной из
осей, тогда уменьшается шаг поиска:
Далее поиск экстремума продолжается с уменьшенным шагом. Условие окончания поиска -
![]()
При достижении условия (6.102) поиск прекращается, и полученная точка Хk принимается в качестве искомой экстремальной точки X. Точка Xk при этом находится в некоторой малой окрестности точки локального экстремума X* , ограничиваемой задаваемым минимальным значением шага поиска hmin.
Параметрами алгоритма покоординатного спуска являются ho, hmin и γ. Алгоритм обеспечивает сходимость к решению X* за конечное число итераций, если функция W(X) имеет первую и вторую производные в окрестности экстремума.
П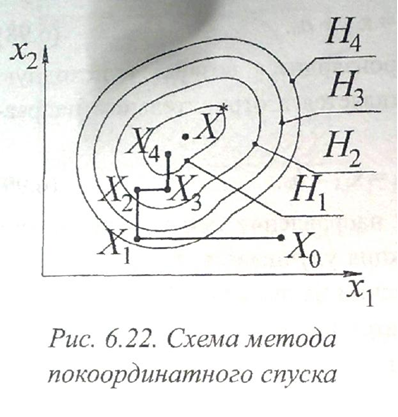 ример
поиска экстремума методом
покоординатного спуска для двумерной
задачи при Х=(х1,х2)
представлен
на рис. 6.22, где показаны два цикла
спусков вдоль осей х1
и
х2
Линии
равных уровней целевой функции W(X)
обозначены
Н1
...,
Н4,
причем Н1<
Н2<
Н3<
Н4,
а минимум ее соответствует точке X*.
Траектория
поиска изображена жирной линией.
ример
поиска экстремума методом
покоординатного спуска для двумерной
задачи при Х=(х1,х2)
представлен
на рис. 6.22, где показаны два цикла
спусков вдоль осей х1
и
х2
Линии
равных уровней целевой функции W(X)
обозначены
Н1
...,
Н4,
причем Н1<
Н2<
Н3<
Н4,
а минимум ее соответствует точке X*.
Траектория
поиска изображена жирной линией.
Движение начато из исходной точки X0. При этом в каждом цикле вдоль каждой из осей выполняется несколько шагов. После достижения точки Х1 значение W(X) начинает возрастать, поэтому произошла смена направления движения. На новом направлении вдоль оси Х2 движение осуществляется к точке Х2 и первый цикл спусков на этом завершается. Затем циклы повторяются, пока не будет выполнено условие прекращения поиска.
3. Метод градиента
Г радиент
- векторная величина, компонентами
которой являются частные производные
целевой функции по управляемым
параметрам:
радиент
- векторная величина, компонентами
которой являются частные производные
целевой функции по управляемым
параметрам:
Градиент всегда сориентирован в направлении наиболее быстрого изменения функции. Градиентное направление является локально наилучшим направлением поиска при максимизации целевой функции, а антиградиентное - при ее минимизации. Это свойство вектора gradW(X) и используется в методе градиента, определяя вид траектории поиска.
Движение по вектору градиента перпендикулярно линиям уровня поверхности отклика (или перпендикулярно поверхности уровня в гиперпространстве в случае, если число проектных параметров больше двух).
Движение в пространстве управляемых параметров осуществляется в соответствии с выражением
![]()
где hk - шаг поиска; Sк - единичный вектор направления поиска
н а
шаге (k
+ 1),
характеризующий направление градиента
в точке Хk,.
При
минимизации целевой функции вектор Sk
должен
иметь направление, противоположное
направлению вектора градиента,
поэтому для его определения используется
выражение
а
шаге (k
+ 1),
характеризующий направление градиента
в точке Хk,.
При
минимизации целевой функции вектор Sk
должен
иметь направление, противоположное
направлению вектора градиента,
поэтому для его определения используется
выражение
Дадим краткое изложение алгоритма поиска минимума целевой функции W(X). В каждой точке траектории поиска Хk, в том числе в исходной точке Х0 определяется градиент целевой
функции gradW(Xk) и единичный вектор направления Sk выполняется шаг в пространстве управляемых параметров к точке Хк+1 согласно выражению (6.104) и оценивается успешность поиска на основе неравенства (6.97). При этом вычисляется значение целевой функции W(Xk+1) в точке Хк+1 и сравнивается с ее значением W(Xk+1) предыдущей точке Хk.
Если условие (6.97) выполнено, то шаг поиска успешный, поэтому определяется новое направление движения из точки Хk+1 и выполняется следующий шаг в точку Хk+2
При большой кривизне линий равных уровней (т.е. при сложном рельефе поверхности целевой функции), а также вблизи экстремальной точки принятый в начале поиска шаг hk может оказаться слишком большим, и условие (6.97) на очередном шаге не будет выполнено. В этом случае необходимо возвратиться в предыдущую точку hk уменьшить шаг по формуле ™
![]()
где γ в коэффициент уменьшения шага: 0 <γ< 1, и повторить движение в том же направлении, но с меньшим шагом.
Условия окончания поиска методом градиента имеют вид

где ε - малая положительная величина.
При выполнении одного из условий: (6.107) или (6.107)-поиск прекращается, а полученная точка Хk принимается в качестве искомой точки экстремума X. Если поиск прекращен по условию (6.107), то считается, что точка Хk находится в некоторой малой окрестности точки X*, ограничиваемой величиной hmin
Малое значение модуля градиента целевой функции означает, что целевая функция в некоторой области вблизи стационарной точки X* изменяется незначительно и поэтому любая точка в этой области может быть принята в качестве допустимого решения задачи оптимизации.
На рис. 6.23, а показан пример поиска минимума целевой функции для двумерной задачи методом градиента. Линии равных уровней целевой функции обозначены H1..., H7, причем H1<Н2<...<Н7 а траектория поиска проходит через точки X0, Х1, Х2… .
Д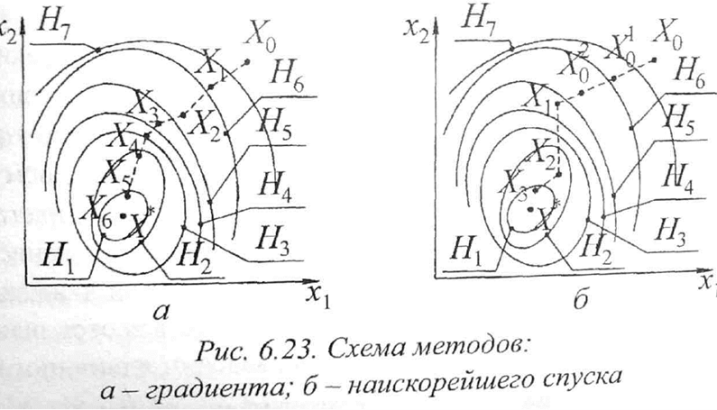 вижение
в градиентном направлении по
определению должно
приводить к улучшению функции качества
Если это не так и W(Xn+1)
< W(Xn),
можно
предположить, что поиск просто «проскочил»
оптимальную точку. В этом случае следует
уменьшить величину шага и повторить
вычисления.
вижение
в градиентном направлении по
определению должно
приводить к улучшению функции качества
Если это не так и W(Xn+1)
< W(Xn),
можно
предположить, что поиск просто «проскочил»
оптимальную точку. В этом случае следует
уменьшить величину шага и повторить
вычисления.