

5.2. Режими скорочення та різновиди роботи м'язів
М'язи, прикріплені сухожиллями до кісток, функціонують в ізометричному й анізометричному режимах (див. рис. 1.13).
При ізометричному (утримуючому) режимі довжина м'яза не змінюється (від гречок. “ізо“ – рівний, “метр” – довжина). Наприклад, у режимі ізометричного скорочення працюють м'яза людини, що підтягся й утримує своє тіло в цьому положенні. Аналогічні приклади: “хрест Азаряна” на кільцях, утримання штанги тощо.
На кривої Хілла ізометричному режиму відповідає величина статичної сили (F0), при якій швидкість скорочення м'яза дорівнює нулю.
Замічено, що статична сила, що виявляється спортсменом в ізометричному режимі, залежить від режиму попередньої роботи. Якщо м'яз функціонував у режимі, що уступає, то F0 більше, ніж у тому випадку, коли виконувалася робота, що переборює. Саме тому, наприклад, “хрест Азаряна” легше виконати, якщо спортсмен приходить у нього з верхнього положення, а не з нижнього.
При анізометричному скороченні м'яз коротшає чи подовжується. В анізометричному режимі функціонують м'язи бігуна, плавця, велосипедиста тощо.
У анізометричному режимі два різновиди. У режимі, що переборює, м'яз коротшає в результаті скорочення. А в режимі, що уступає, м'яз розтягується зовнішньою силою. Наприклад, литковий м'яз спринтера функціонує в режимі, що уступає, при взаємодії ноги з опорою у фазі амортизації, а в, що переборює у фазі відштовхування.
Права частина кривої Хілла (див. рис. 1.13) відображає закономірності роботи, що переборює, при якій зростання швидкості скорочення м'яза викликає зменшення сили тяги. А в режимі, що уступає, спостерігається зворотна картина: збільшення швидкості розтягання м'яза супроводжується збільшенням сили тяги. Це є причиною численних травм у спортсменів (наприклад, розриву ахіллесового сухожилля в спринтерів і стрибунів у довжину).
5.3. Групова взаємодія м'язів
Існують два випадки групової взаємодії м'язів: синергізм і антагонізм.
М’язи-синергісти переміщують ланки тіла в одному напрямку. Наприклад, у згинанні руки в ліктьовому суглобі беруть участь двоголовий м'яз плеча, плечовий і плечепроменевий м'язи тощо. Результатом синергічної взаємодії м'язів служить збільшення сумарної сили дії. Але цим значення синергізму м'язів не вичерпується. При наявності травми, а також при локальному стомленні будь-якого м'яза його синергісти забезпечують виконання рухової дії.
М'язи-антагоністи (на противагу м’язам-синергістам) мають різнонаправлену дію. Так, якщо один з них виконує роботу, що переборює, то інший, що уступає. Існуванням м'язів-антагоністів забезпечується: 1) висока точність рухових дій; 2) зниження травматизму.
5.4. Потужність і ефективність м'язового скорочення
В міру збільшення швидкості м'язового скорочення сила тяги м'яза, що функціонує в режимі, що переборює, знижується по гіперболічному законі.
Відомо, що механічна потужність дорівнює добутку сили на швидкість. Існують сила і швидкість, при яких потужність м'язового скорочення найбільша (рис. 1.14). Цей режим має місце, коли і сила, і швидкість складають приблизно 30% від максимально можливих величин.
Питання для самоконтролю:
Якими показниками характеризується геометрія мас тіла?
Які показники геометрії мас потрібно знати, щоб обчислити найбільш економічний темп ходьби? На скільки точним буде цей розрахунок?
Яка міцність кіст і м'язів?
Намалюйте криву Хілла і вкажіть на ній області, що відповідають переборюючому, уступаючому та ізометричному (утримуючому) режимам м'язового скорочення.
Поясніть, чому один із двох варіантів виконання “хреста Азаряна”
(з верхньої та з нижньої точки) легше здійснити, чим інший.
У якому режимі м'язового скорочення виявляється максимальна сила? Як це зв'язано з небезпекою одержання травм?
При якій умові досягається найвища потужність м'язового скорочення?
Що вивчає біомеханіка?
Які основні розділи біомеханіки?
У чому розходження між такими поняттями, як “рух”, “рухова дія” і “рухова діяльність”?
Перелічите основні етапи біомеханічного аналізу.
Що таке оптимізація рухової діяльності?
Які критерії оптимальності рухової діяльності вам відомі?
У чому полягає головна відмінність функціонального підходу від системно-структурного?
Що таке топографія працюючих м'язів?
Приведіть приклади ситуацій із практики фізичного виховання і спорту, коли необхідно біомеханічне обґрунтування:
а) техніки рухових дій;
б) тактики рухової діяльності.
Література для самостійного опрацювання
Донской Д. Д. Биомеханика: учеб. Пособие для студентов фак. Физ. воспитания пединститутов. – М.: Просвещение, 1975. – 239 с.
Донской Д. Д. Биомеханика: уч-ник для ин-тов физ. культ./Д. Д. Донской, В. М. Зациорский – М.: Физкультура и спорт, 1979. – 264 с.
Уткин В. Л. Биомеханика физических упражнений: учебн. пособие для студентов фак. физ. воспитания пед. ин-тов и для ин-тов физ культуры по спец. №2114 “Физическое воспитание”. – М.: Просвещение, 1989. – 210 с.
Біомеханіка спорту /за загальною редакцією А. М. Лапутіна. – Київ.: Олімпійська література, 2001. – 318 с.
Дубровский В. И. Биомеханика: ученик для сред. и высш. учеб. заведений / В. И. Дубровский, В. Н. Фёдорова. – М.: ВЛАДОС-ПРЕСС, 2004. – 672 с.
Загревский В. И. Биомеханика физических упражнений: учебн. пособие /В. И. Загревский, О. И. Загревский. – Томск: ТМЛ-Пресс, 2007. – 274 с.
Попов Г. И. Биомеханика: учебн. для студ. вузов обуч. по спец “Физическая культура”. – М.: Академия, 2008. – 254 с.
Грецький алфавіт
Назва літери |
Прописна |
Мала літера |
Назва літери |
Прописна |
Мала літера |
Альфа |
|
|
Ню |
|
|
Бета |
|
|
Ксі |
|
|
Гамма |
|
|
Омікрон |
|
|
Дельта |
|
|
Пі |
|
|
Епсилон |
|
|
Ро |
|
|
Дзета |
|
|
Сигма |
|
|
Ета |
|
|
Тау |
|
|
Тета |
|
|
Іпсилон |
|
|
Йота |
|
|
Фі |
|
|
Каппа |
|
|
Хі |
|
|
Лямбда |
|
|
Псі |
|
|
Мю |
|
|
Омега |
|
|
ДОДАТКИ
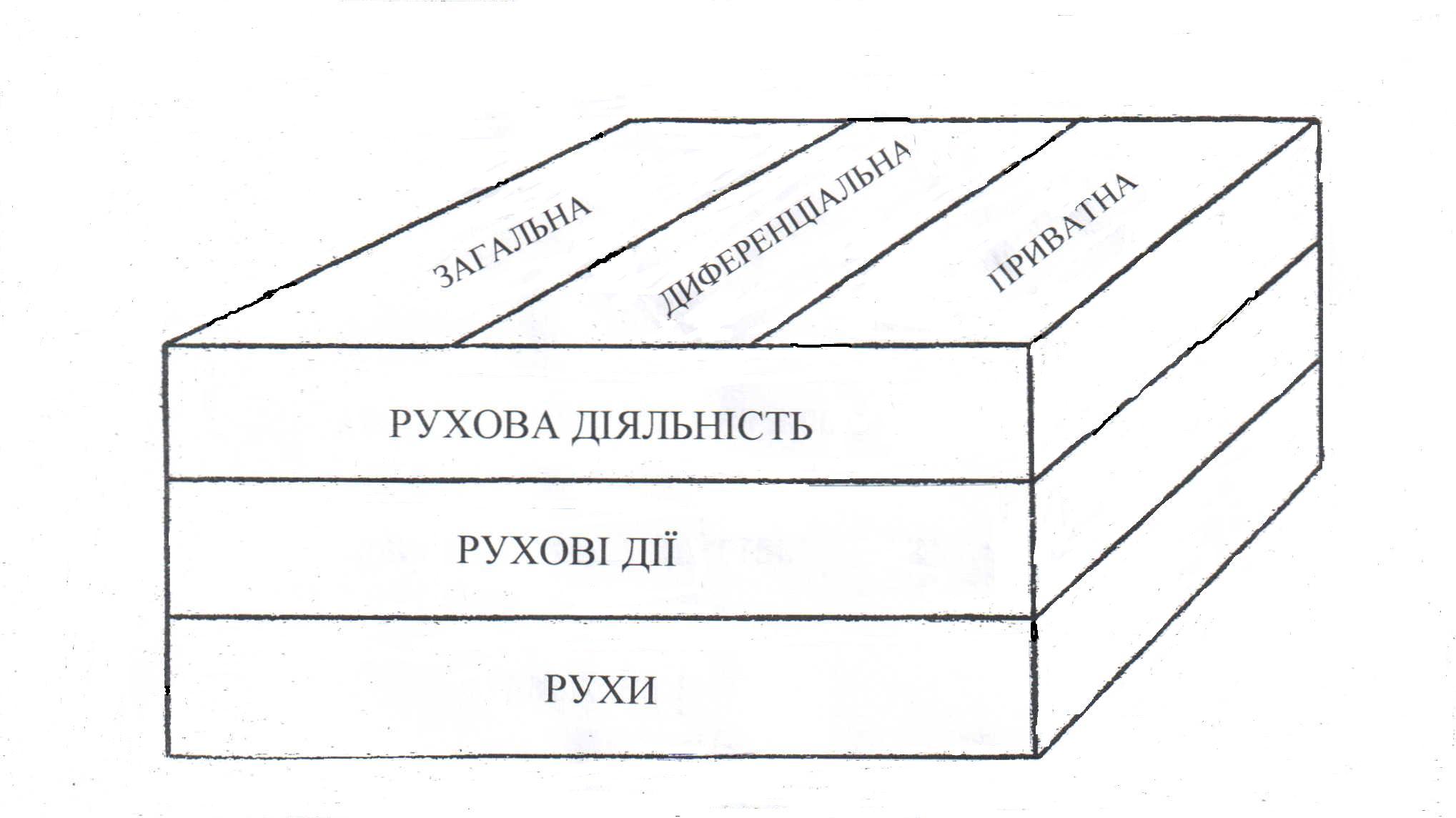
Рис. 1.1. (1). Архітектоніка сучасної біомеханіки
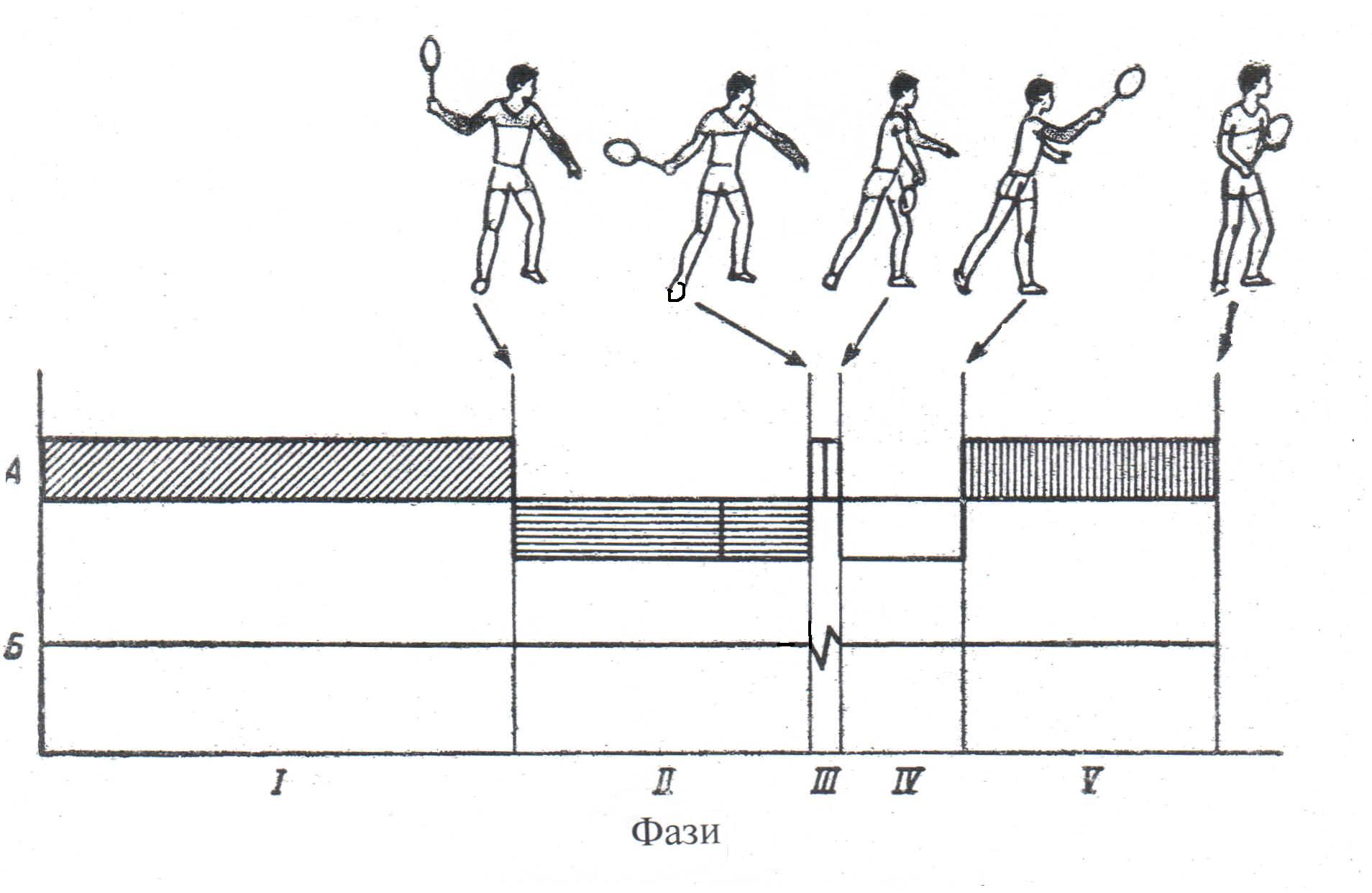
Рис. 1.2.(2) Фазовий склад ударної дії у тенісі (за Л. С. Зайцевою):
А – хронограма; Б – тензометрична відмітка удару; I – фаза руху назад для замаху; II – фаза прискореного руху ракетки уперед; III – фаза взаємодії ракетки з м’ячем; IV – фаза уповільненого руху ракетки уперед; V – фаза повернення ракетки до вихідного рівня
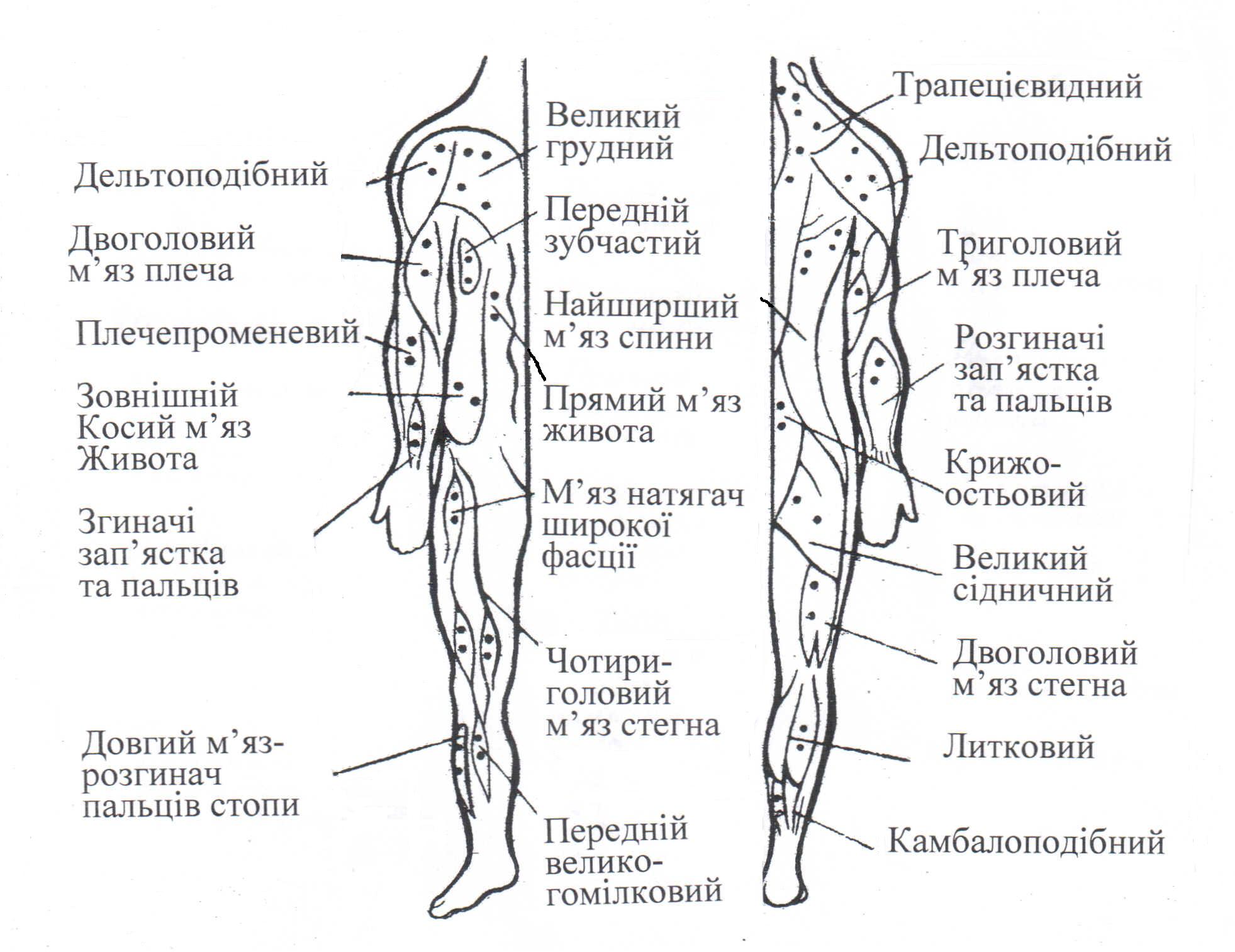
Рис. 1.3.(3). Схематичне зображення м’язів тіла людини та місць накладання електроміографічних електродів (за Droer, Каунсілмену, Барчаі, перероблено)
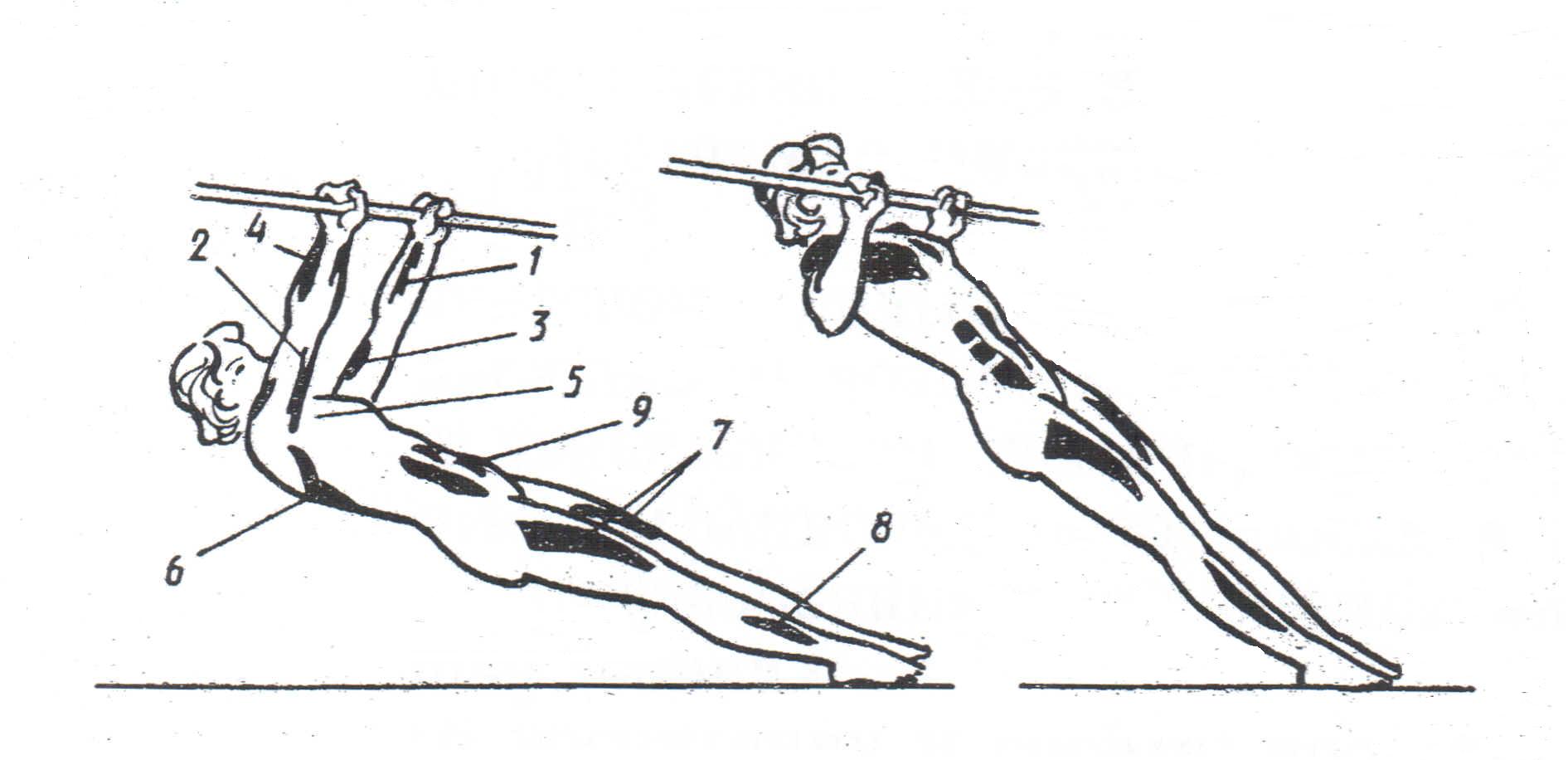
Рис. 1.4.(4). Граничні пози при підтягуванні у висі лежачі на незлій поперечині (штрихуванням позначені найбільш активні м’язи):
1 – м’язи-згиначі кисті; 2 – триголовий м. плеча; 3 – двоголовий м. плеча; 4 – плече променевий м.; 5 – великий грудний м.; 6 – найширший м. спини; 7 – чотириголовий м. стегна; 8 – м’язи-розгиначі стопи; 9 – прямий м. живота
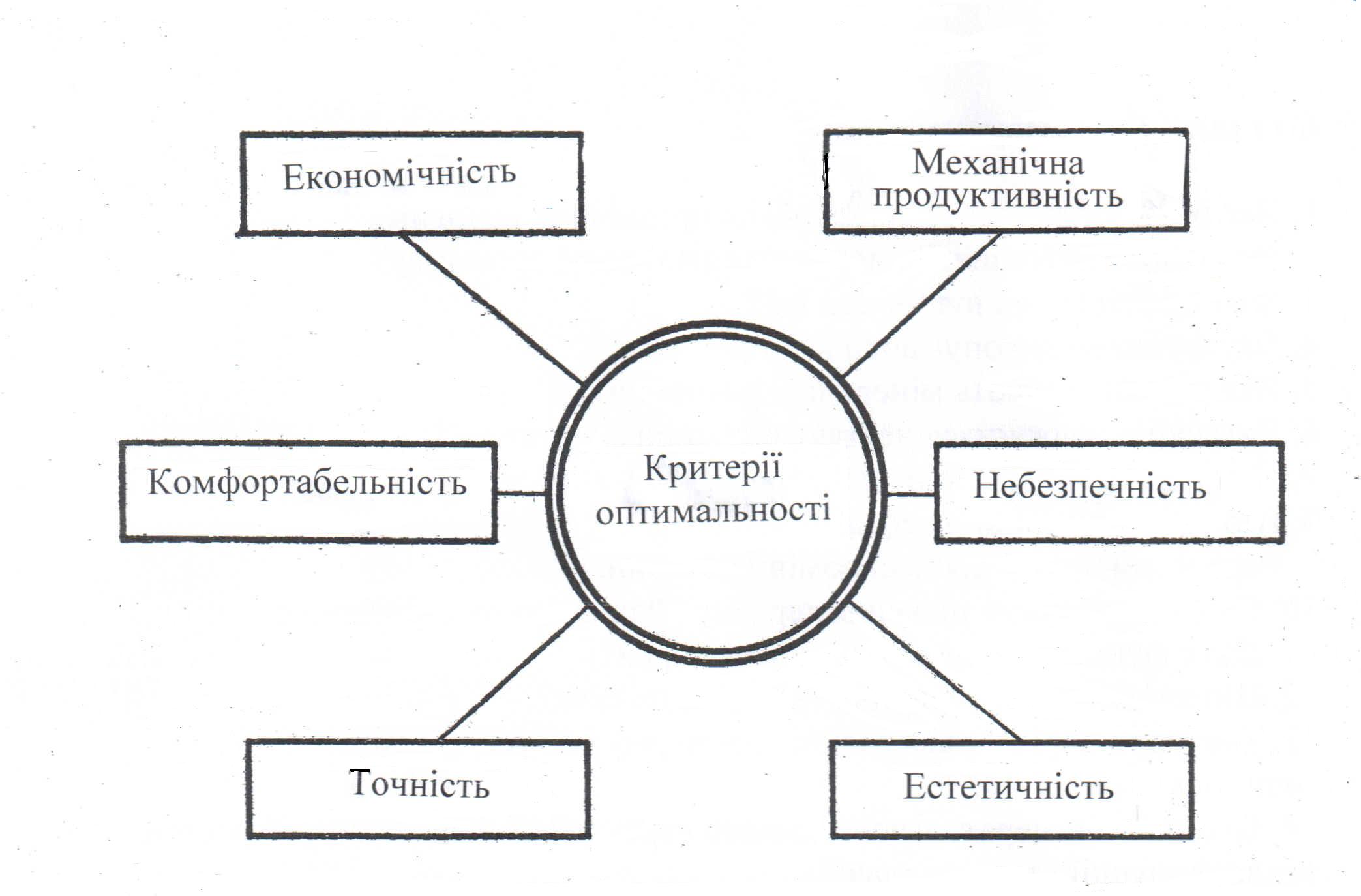
Рис. 1.5.(5). Критерії оптимальності рухової діяльності
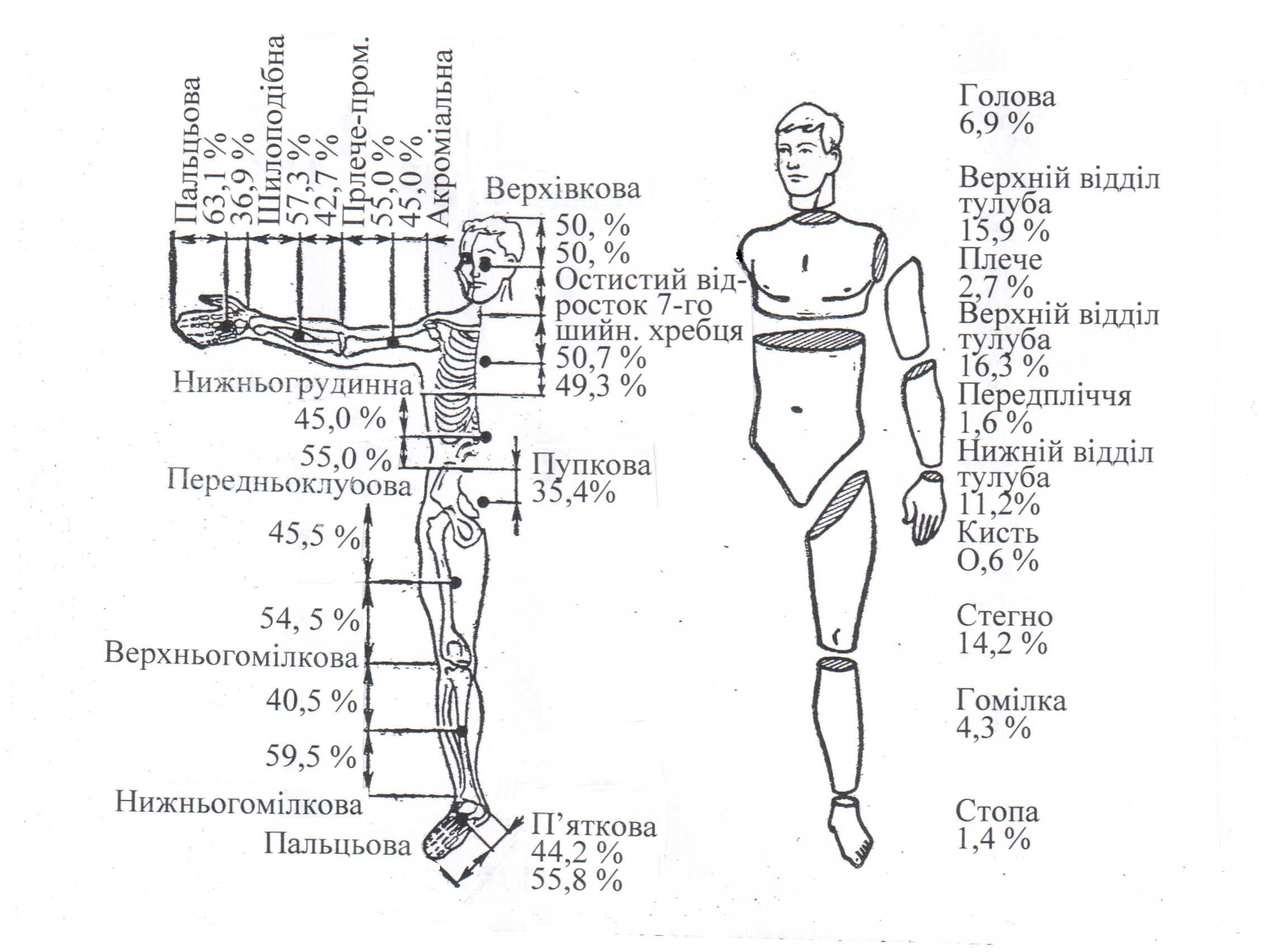
Рис. 1.6.(7). 15-ти – ланцюгова модель людського тіла:
праворуч – спосіб поділу тіла на сегменти і маса кожного сегмента (у % до маси тіла); ліворуч – місця розташування центрів мас сегментів (у % до довжини сегмента) – див. табл. 1 (за В. М. Заціорським, А. С. Аруіну,
В. Н. Селуяновим)
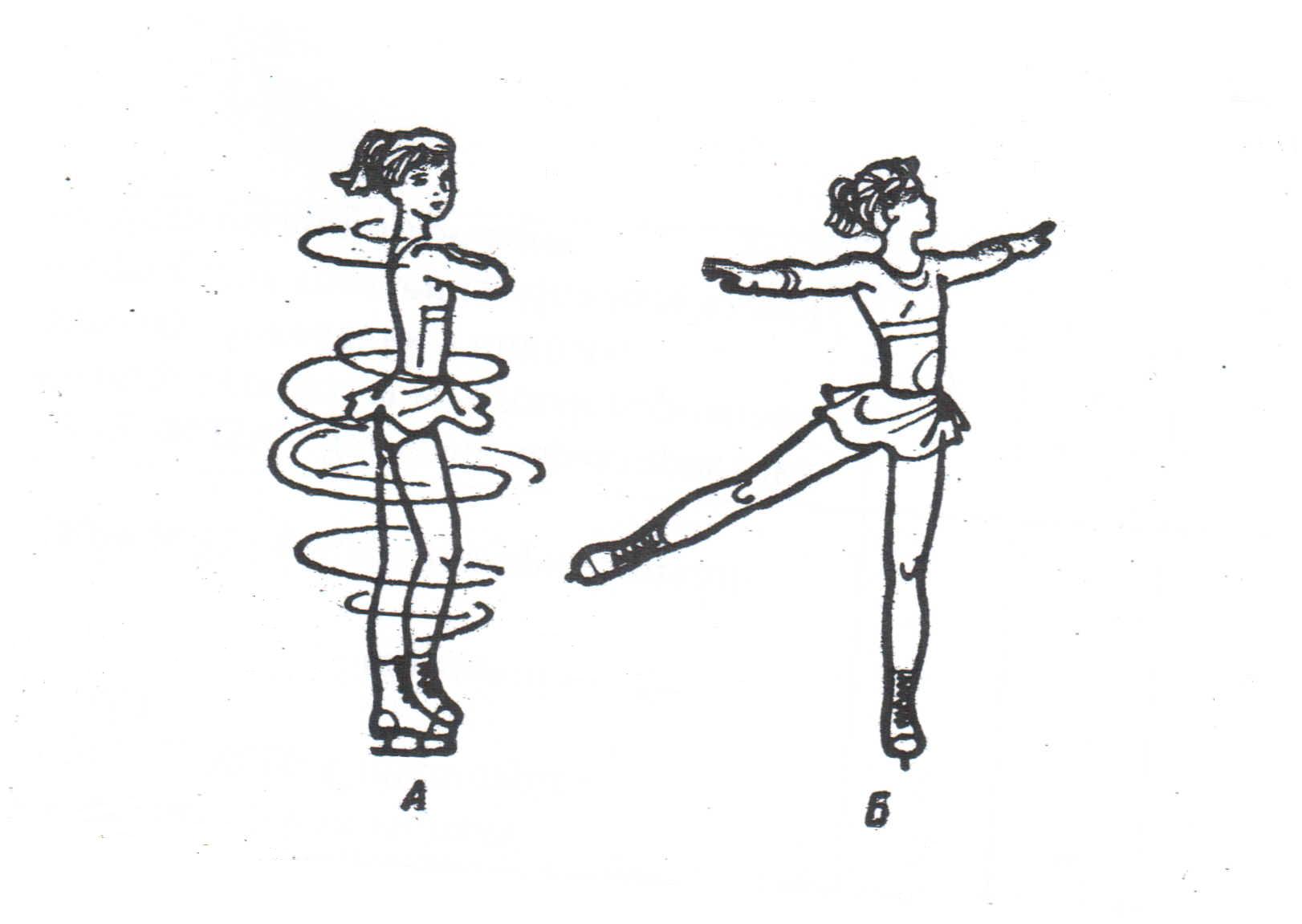
Рис. 1.7.(8). Уповільнення обертання при зміні пози:
А – менша; Б – більша величина радіуса інерції і моменту інерції, що пропорційний квадрату радіусу інерції (J = mR2 ін,)
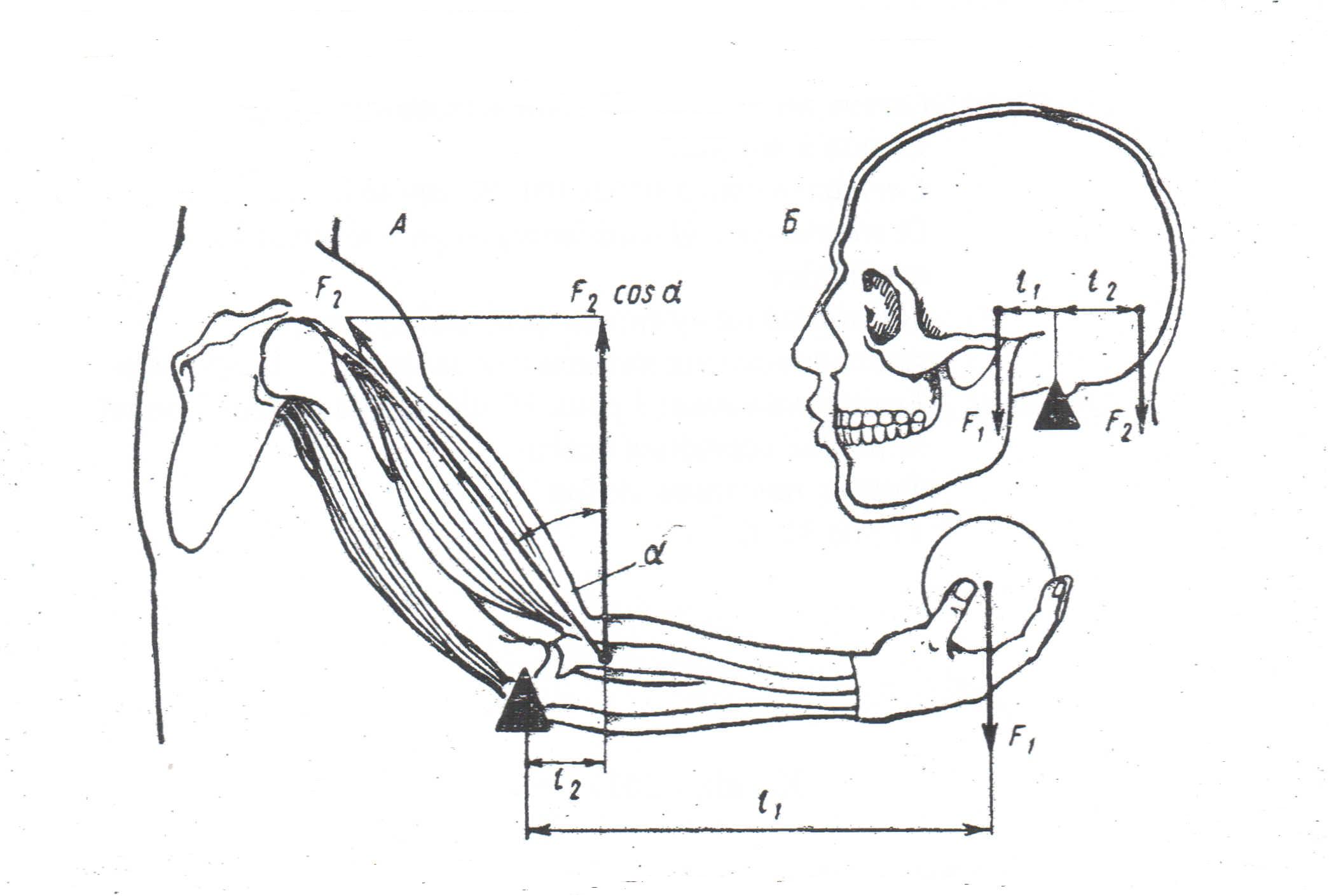
Рис. 1.8.(9). Приклади важелів тіла людини:
А – передпліччя-важель другого роду; Б – голова-важель першого роду
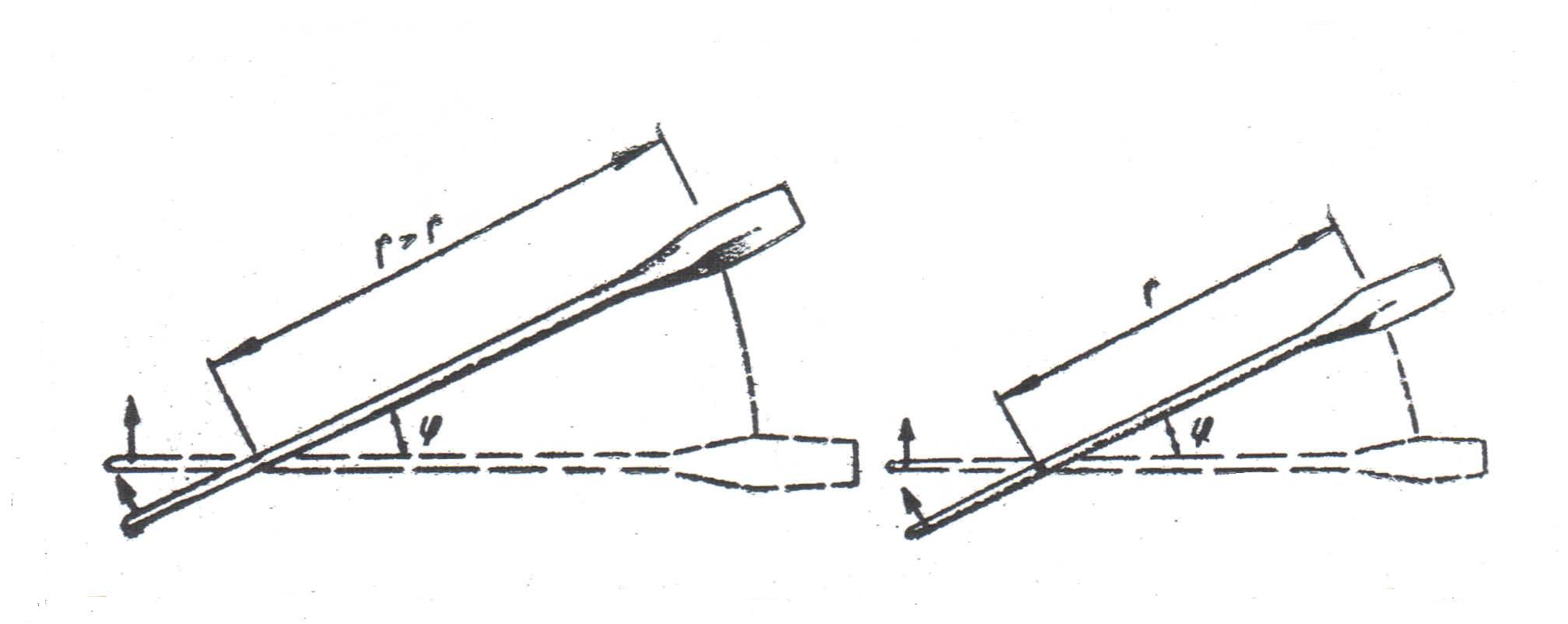
Рис.
1.9. (10). При однаковому кутовому переміщенні
(φ) і кутовій швидкості ![]() траєкторія
(показана пунктиром) тим довша, сила, що
прикладається до весла (показана
стрілками) тим більша і лінійна швидкість
V
= ωr
тим
вища, чим більший радіус обертання (r)
траєкторія
(показана пунктиром) тим довша, сила, що
прикладається до весла (показана
стрілками) тим більша і лінійна швидкість
V
= ωr
тим
вища, чим більший радіус обертання (r)
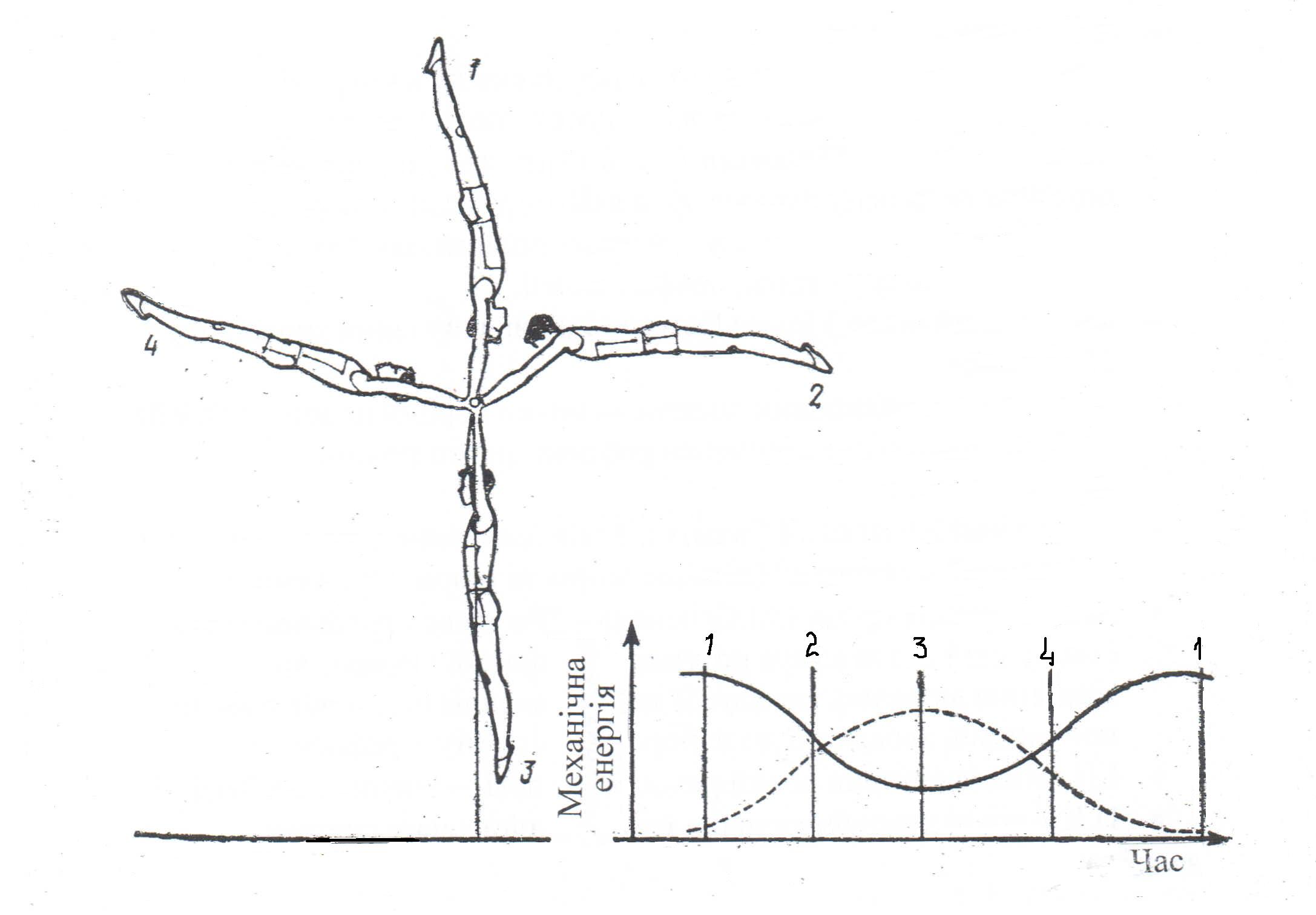
Рис. 1.10.(11) Один із варіантів рекуперації енергії при циклічних рухах:
потенціальна енергія тіла (безперервна лінія) переходить у кінетичну (пунктир), яка знову перетворюється у потенційну і сприяє переходу тіла гімнаста у верхнє положення; цифри на графіку відповідають пронумерованим позам спортсмена
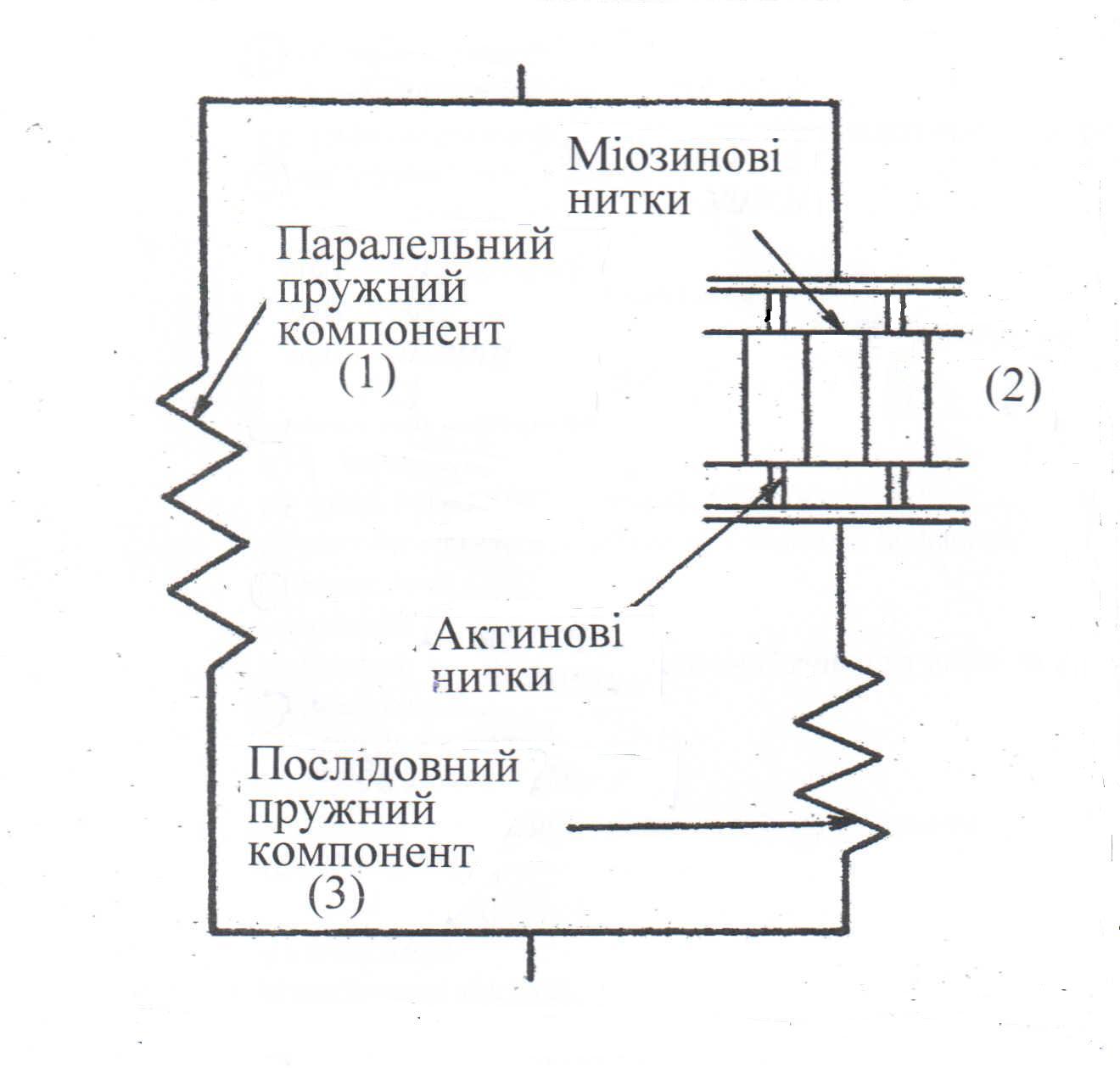
Рис. 1.11.(12) Трикомпонентна модель м’яза:
1 – паралельний пружний компонент; 2 – скоротний компонент; 3 – послідовний пружний компонент (за В. М. Зациорським)
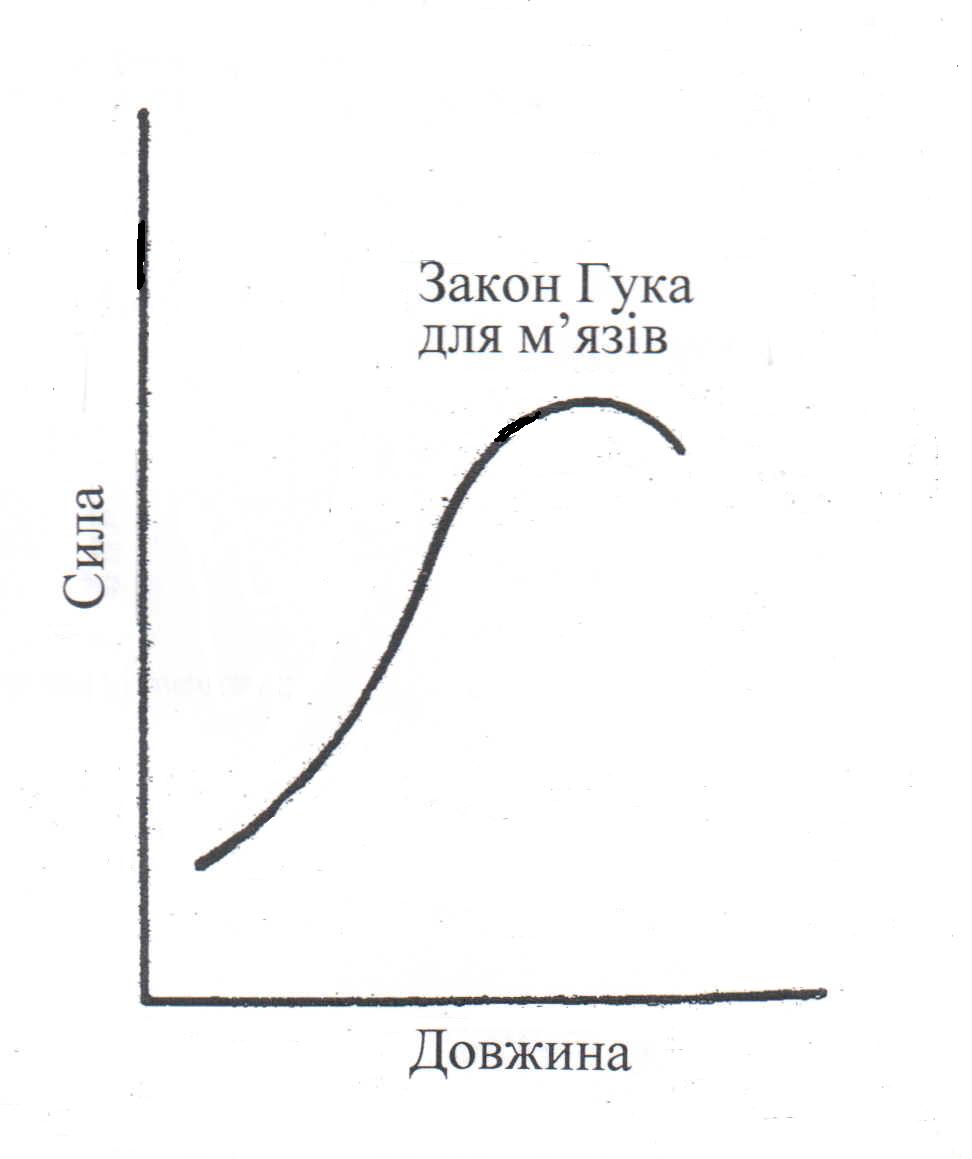
Рис. 1.12.(13). Зв’язок між силою тяги та довжиною м’яза
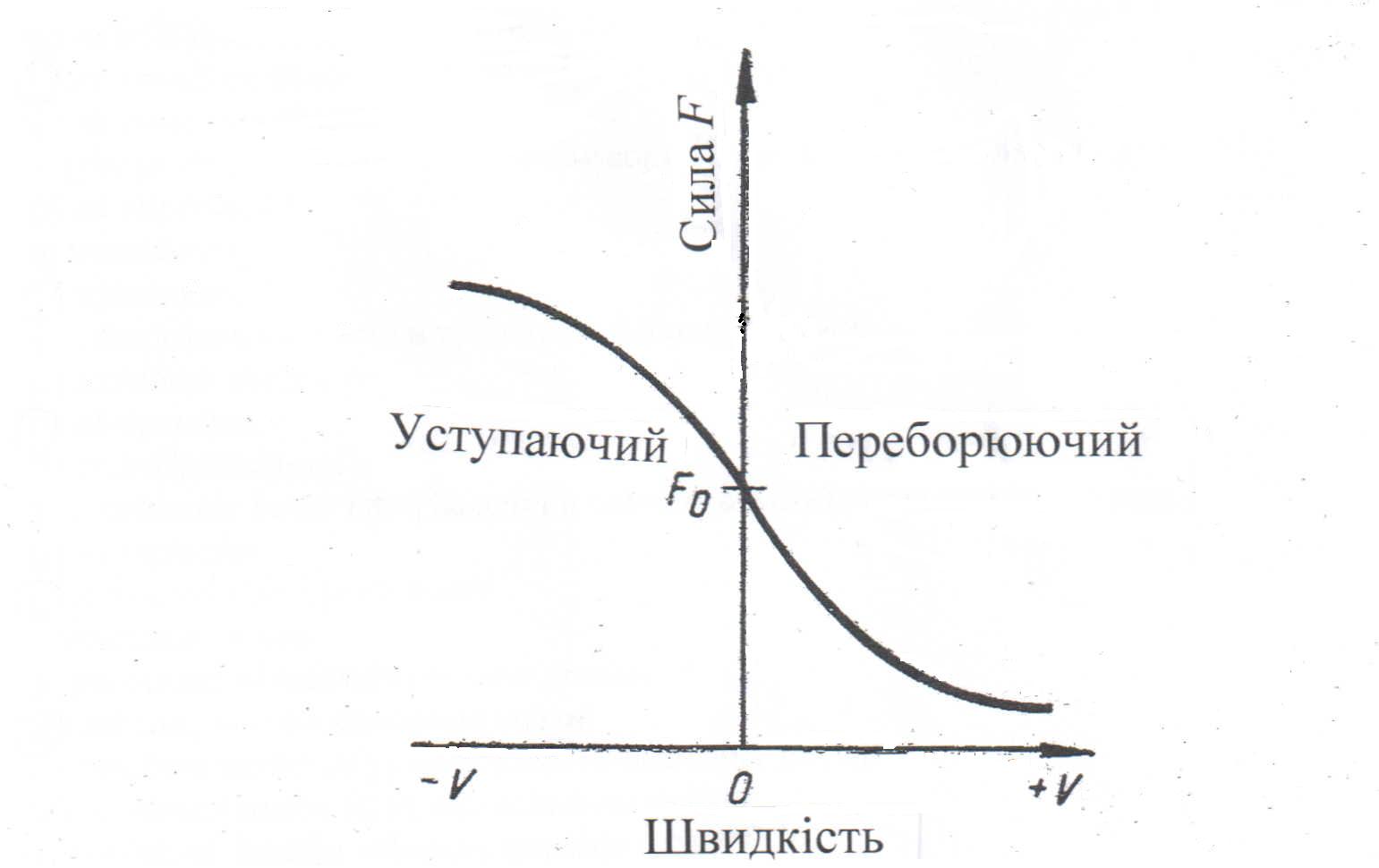
Рис. 1.13.(14). Взаємозв’язок між
Силою та швидкістю м’язового скорочення (за А. Хіллом; Abbot)
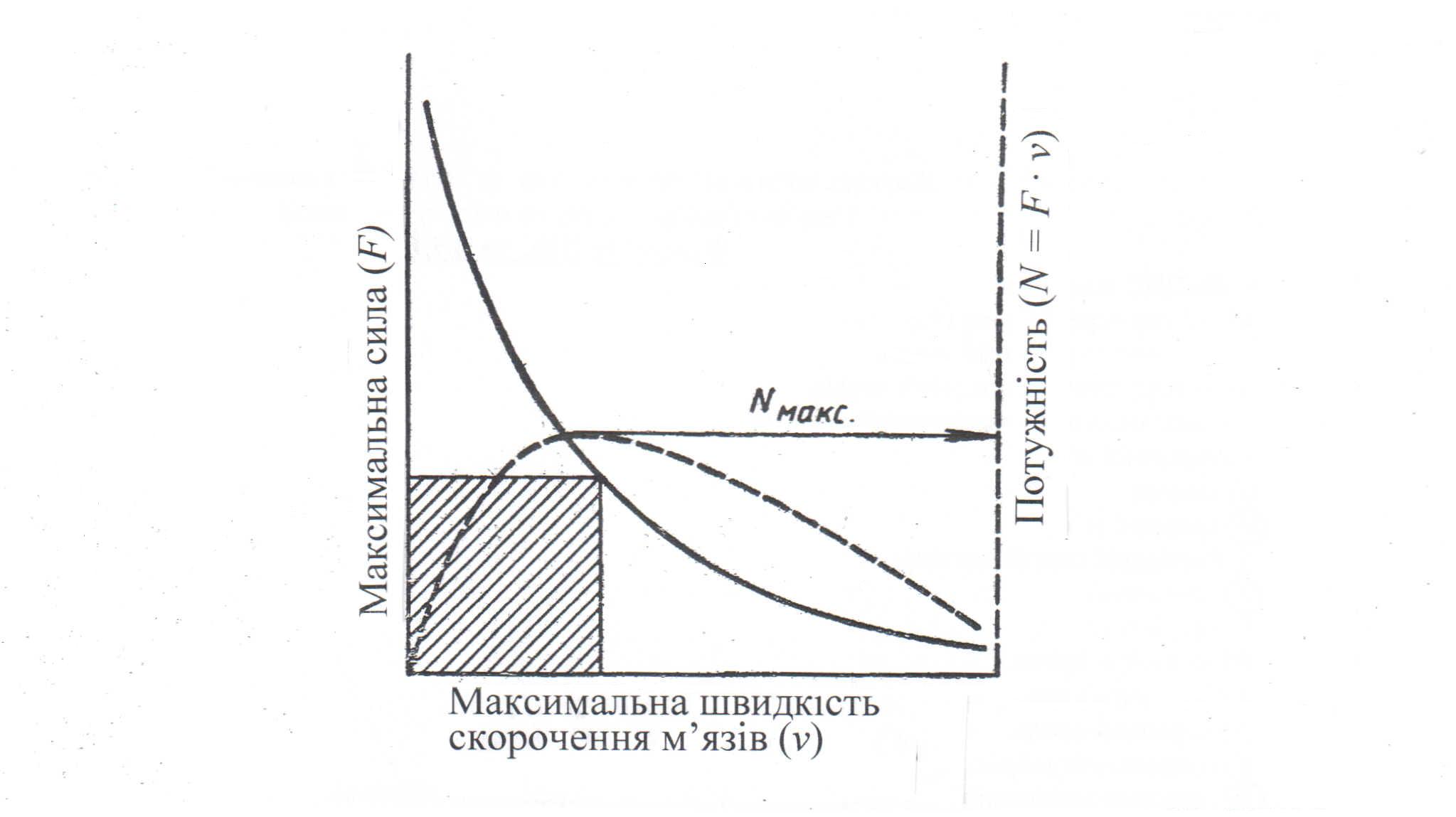
Рис. 1.14.(15). Потужність м’язового скорочення в залежності від сили, що проявляється та швидкості; заштрихований прямокутник відповідає максимальній швидкості
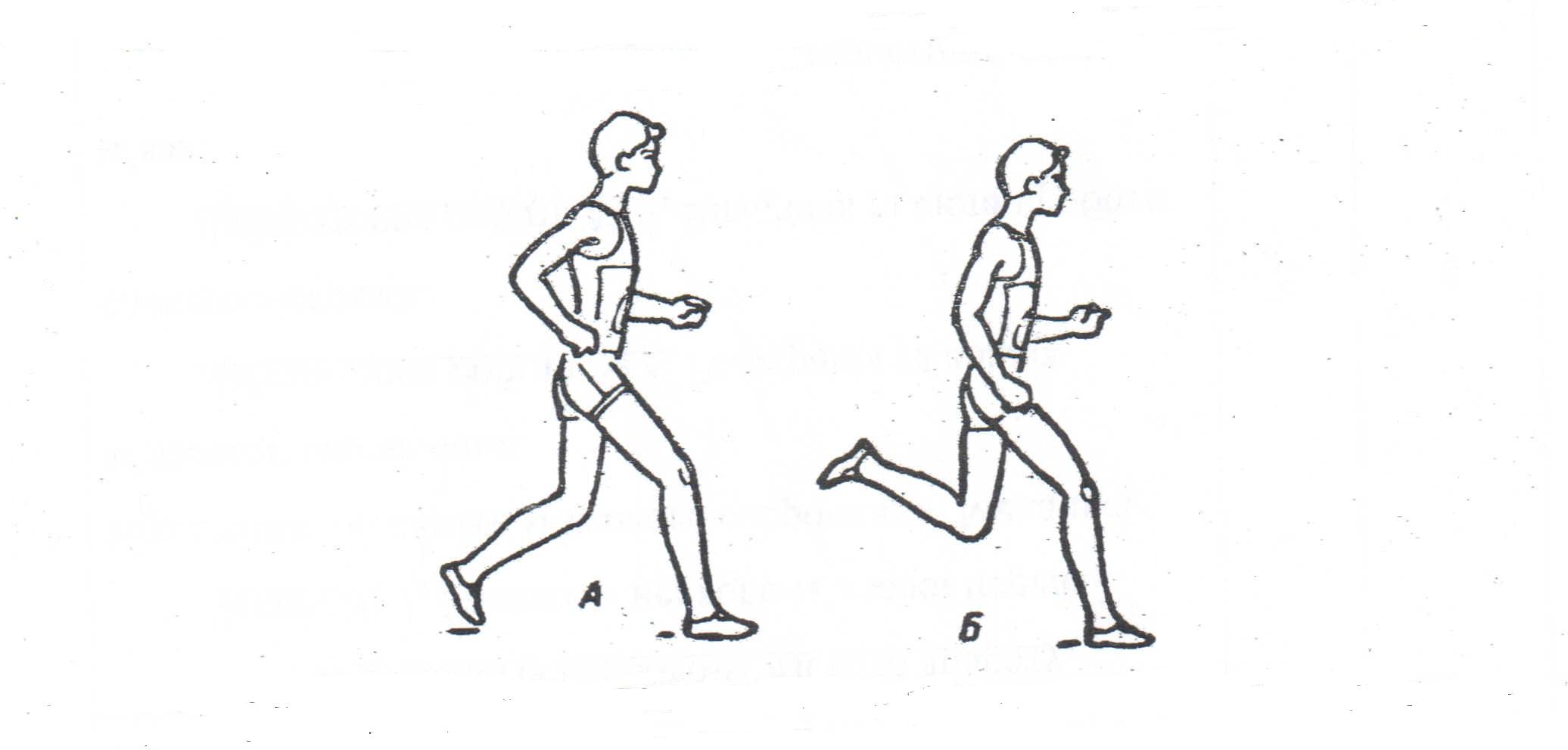
Рис. 1.15.(16). Два варіанти техніки бігу; при перенесенні ноги у бігуна Б кут у колінному суглобі та момент інерції менше, ніж у бігуна А