

Федеральное Агентство Железнодорожного транспорта
Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Петербургский государственный университет путей сообщения
Кафедра «Электрическая тяга»
Якушев А.Я., Викулов И.П., Цаплин А.Е.
Исследование способов оценки качества регулирования САУ ЭПС
Методические указания к лабораторной работе
Санкт-Петербург
2013
Цель исследования - изучение характерных параметров логарифмических частотных характеристик разомкнутой системы, определяющих основные показатели качества регулирования замкнутой системы автоматического управления (САУ) в переходных режимах при возмущающих воздействиях на систему.
1 Частотный метод оценки качества регулирования
Динамические свойства устойчивой САУ принято оценивать по виду переходных процессов, возникающих при воздействиях на систему возмущающих факторов. Требования, определяющие приемлемость функционирования системы автоматического управления в переходных режимах, объединяются понятием качества регулирования. Эти требования сформированы практикой создания систем автоматического управления, настройки их рабочих режимов и определяются совокупностью показателей качества регулирования.
Показатели качества регулирования позволяют сделать количественную оценку характерных особенностей переходного процесса выходной переменной при ступенчатых изменениях задающего Dg×1(t) или возмущающего DZ×1(t) воздействий.
Применяются следующие основные показатели качества регулирования:
- максимальное
перерегулирование выходной переменной
![]() ,
,
- допустимая ошибка регулирования DYдоп,
- степень колебательности процесса регулирования m,
- период колебаний процесса регулирования t,
- время регулирования tp.
Перерегулированием называют экстремальное отклонение выходной переменной относительно ее установившегося уровня при протекании переходного процесса автоматического регулирования.
Максимальным
перерегулированием называют максимальное
превышение выходной переменной
![]() установившегося
уровня (pис.2,а), отнесенное к ее
установившемуся уровню
установившегося
уровня (pис.2,а), отнесенное к ее
установившемуся уровню
![]() :
:
![]()
Допустимой ошибкой регулирования называют заранее установленные допустимые отклонения выходной переменной пределах ±DYдоп относительно установившегося уровня. Допустимую ошибку регулирования обычно принимают равной DYдоп =± (0,02...0,05)Yуст (pис.2,а)
Степенью колебательности m называют число знакопеременных перерегулирований переходного процесса выходной переменной y(t), превышающих по величине допустимую ошибку регулирования ±DYдоп. Для монотонного переходного процесса m=0 (рис.2,б), для апериодического - m=1, для мало-колебательного - m=2...3, для колебательного - m≥4.
Период колебаний t представляет собой интервал времени между двумя смежными максимумами перерегулирования колебательного процесса изменения выходной переменной (рис.2,б).
Время регулирования tp характеризует длительность протекания переходного процесса от начала ступенчатого воздействия на систему до затухания переходного процесса выходной переменной y(t) в пределах допустимой величины её отклонения относительно установившегося уровня.

Рис. 1.
Инженерный частотный метод оценки качества регулирования системы автоматического управления основан на использовании логарифмических частотных характеристик (ЛЧХ) разомкнутой системы, приведенной к одноконтурной.
Логарифмическая
амплитудно-частотная характеристика
(ЛАЧХ) показывает, как изменяются в
логарифмическом масштабе усиление
амплитуды гармонических сигналов,
передаваемых звеном или системой, в
зависимости от логарифма угловой
частоты. Для
количественного выражения ординат ЛАЧХ
использована логарифмическая единица
усиления мощности гармонического
сигнала 1бел [Б], применяемая в акустике.
Она характеризует усиление мощности
сигнала в 10 раз. В теории автоматического
управления используют понятие усиления
амплитуды гармонического сигнала.
Мощность гармонического сигнала
пропорциональна квадрату его амплитуды,
поэтому единице усиления мощности 1 бел
соответствует усиление амплитуды
сигнала в
![]() раза.
Практически используют дольную единицу
- децибел (1дБ=0,1Б), соответствующую
усилению мощности сигнала в
раза.
Практически используют дольную единицу
- децибел (1дБ=0,1Б), соответствующую
усилению мощности сигнала в
![]() раза
и увеличению амплитуды в
раза
и увеличению амплитуды в
![]() раза.
Логарифмы угловой частоты
раза.
Логарифмы угловой частоты
![]() выражаются в декадах; 1 дек соответствует
увеличению частоты в 10 раз.
выражаются в декадах; 1 дек соответствует
увеличению частоты в 10 раз.
Достоинством частотного метода исследования САУ является простота построения ЛАЧХ, основанная на графоаналитическом сложении линеаризованных табличных характеристик, в соответствии с главной передаточной функцией разомкнутой системы, содержащей табличные передаточные функции звеньев направленного действия.
Аналитическая оценка качества регулирования замкнутой системы основана на сопоставлении переходных функций замкнутой системы автоматического регулирования с логарифмическими частотными характеристиками разомкнутой системы.
Принятый для анализа 3-й порядок системы автоматического регулирования позволяет установить связь между параметрами САУ, характерными особенностями ЛАЧХ разомкнутой системы и количественными показателями качества регулирования, определяемыми переходной функцией замкнутой системы. С другой стороны, закономерности, установленные применительно к системе 3-го порядка, можно распространить на системы более высоких порядков, поскольку система 3-го порядка достаточно полно отображает основные свойства систем автоматического регулирования более высоких порядков.
В зависимости от закона регулирования пропорционального или пропорционально-интегрального структурная схема системы 3-го порядка может иметь вид, показанный на рис.1,а или1,б.

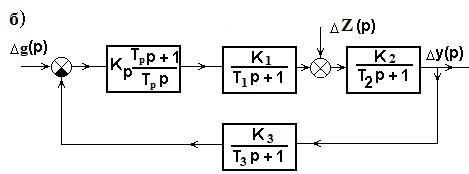
Рис.2.
Операторные передаточные функции разомкнутой САУ с пропорциональным и пропорционально-интегральным законами регулирования, определяющие форму ЛАЧХ, характеризуются следующими выражениями:
- для САУ с П-регулятором:
![]() ;
(1)
;
(1)
- для САУ с ПИ-регулятором:
![]() . (2)
. (2)
В выражениях (1) и (2) общий коэффициент усиления обозначен:
![]() . (3)
. (3)
В соответствии
законами регулирования, пропорциональным
и пропорционально-интегральным, ЛАЧХ
разомкнутых систем можно подразделить
на два вида. Графики линеаризованных
ЛАЧХ для САУ с пропорциональным и
пропорционально-интегральным законами
регулирования показаны соответственно
на рис.3,а и б. С целью конкретизации
связи динамических параметров структурных
звеньев САУ с формой графиков ЛАЧХ
условно принято соотношение постоянных
времени
![]() и для регулятора с пропорционально-интегральным
законом регулирования
и для регулятора с пропорционально-интегральным
законом регулирования
![]() .
.
Ордината точки
пересечения ЛАЧХ оси ординат для САУ с
пропорциональным законом регулирования
определяется величиной общего коэффициента
усиления
![]() ,
для САУ с пропорционально-интегральным
законом регулирования - величиной
,
для САУ с пропорционально-интегральным
законом регулирования - величиной
![]() .
Частота среза ЛАЧХ в обоих случаях, с
учетом принятой настройки регуляторов
на апериодический или малоколебательный
процесс регулирования и постоянной
времени ПИ-регулятора
,
определяется следующим выражением:
.
Частота среза ЛАЧХ в обоих случаях, с
учетом принятой настройки регуляторов
на апериодический или малоколебательный
процесс регулирования и постоянной
времени ПИ-регулятора
,
определяется следующим выражением:
![]() . (4)
. (4)
Изменение крутизны
наклона линейного отрезка ЛАЧХ с минус
20 дБ/дек на минус 40 дБ/дек правее частоты
среза в точке N
с ординатой G1
происходит при логарифмической частоте
![]() .
.
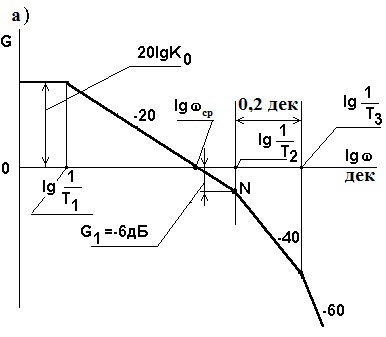

Рис.3