

Лабораторная работа № 2
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ (ДПВ)
2.1. Цель работы
Изучение электромеханических свойств электродвигателя постоянного тока последовательного возбуждения.
2.2. Теоретическое введение по изучаемым вопросам
Работой предусматривается получение расчетным и экспериментальным путями электромеханических и механических характеристик ДПВ при различных схемах включения в двигательном режиме и в режиме динамического торможения
Уравнения электромеханической и механической характеристик могут быть записаны следующим образом:
|
(2.1) |
|
(2.2) |
Однако, вследствие того, что при изменении тока I изменяется и магнитный поток Ф, т.е. уравнения содержат две переменные при U = const характеристики не имеют строгого аналитического выражения. Поэтому считают, что при изменении нагрузки от нуля до номинальной величины существует пропорциональная зависимость между магнитным потоком машины и током якоря, и на основе этого допущения получают приближённое уравнение электромеханической характеристики:
|
(2.3) |
где I = Ф;
- коэффициент пропорциональности.
Уравнение механической характеристики в этом случае имеет вид:
|
(2.4) |
Оно
получено из уравнения (2.3) с учетом того,
что
![]() ,
т.к. Ф
= I,
момент:
,
т.к. Ф
= I,
момент:
М = CI. |
(2.5) |
Последняя формула, свидетельствует о том, что при изменении нагрузки в пределах номинальной электромагнитный момент двигателя последовательного возбуждения пропорционален квадрату тока якоря. При больших нагрузках эта зависимость нарушается по причине насыщения магнитной цепи машины.
При уменьшении нагрузки уменьшается и магнитный поток машины, что ведет к. возрастанию скорости двигателя (это следует из уравнения электромеханической или механической характеристик). По этой причине не рекомендуется работа двигателя с последовательным возбуждением при нагрузках меньших 0,25·МН во избежание аварийной ситуации, его "разноса".
Для расчета сопротивления добавочного резистора, вводимого в цепь якоря с целью получения желаемой скорости на реостатной характеристике в двигательном режиме или режиме противовключения, необходимо для одной и той же нагрузки записать уравнение электромеханической характеристики для точки естественной характеристики, а затем записать отношение скоростей И и Е. Из полученной пропорции определяют искомое сопротивление. Если в качестве нагрузки дается момент двигателя, то по рабочим характеристикам можно найти соответствующее ему значение тока.
2.3. Описание лабораторной установки
Электрическая схема установки приведена на рис.2. Электродвигатель последовательного возбуждения М питается от сети постоянного тока. Изменение схемы включения двигателя осуществляется переключателями SA1, SA2, SA3. Автоматический выключатель QF1 служит для подачи питания на схему управления, а магнитный пускатель на контакторе KM1 - для подачи постоянного напряжения на силовую часть схемы питания исследуемого двигателя. Момент на валу двигателя М создается нагрузочным генератором G. В качестве датчика скорости используется тахогенератор ВR, подключенный к вольтметру PV3. Переключатель SA4 позволяет включать машину G для ее работы в генераторном и двигательном режимах. Автоматический выключатель QF2 служит для защиты и видимого отключения машин М и G.
С целью исключения работы "в разнос" исследуемого двигателя М в схему установки введены реле обрыва, поля КА9, катушка которого включена последовательно с обмоткой возбуждения LG машины G и реле тока КА10, контролирующее наличие тока в якорной цепи этой машины. В случае отсутствия тока в обмотке возбуждения LG или в якорной цепи этой машины. В случае отсутствия тока в обмотке возбуждения LG или в якорной цепи нагрузочной машины размыкаются контакты КА9 или КА10 в цепи катушки контактора KM1 и двигатель М отключается.
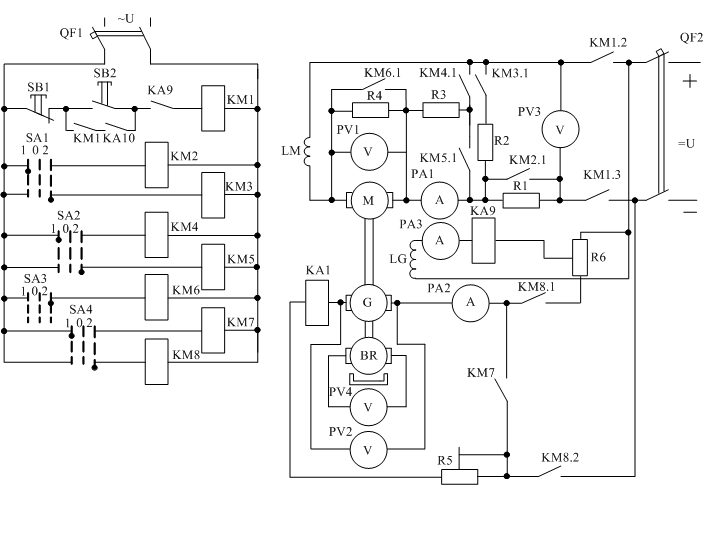
Рис.2