

12. Методы линеаризации нелинейных моделей.
На рис.10.2 приведена схема нелинейной системы, для анализа которой можно воспользоваться методом гармонической линеаризации
Рис.10.2 Структурная схема нелинейной системы
В этой схеме входной сигнал x(t) = Asint - гармонический, а после нелинейного элемента НЭ включен фильтр нижних частот (ФНЧ) с передаточной функцией Wл(p).
При гармоническом входном сигнале x(t) = Asint = Asin, где =t сигнал y на выходе НЭ будет периодическим, но не гармоническим, так как зависимость y=f(x) нелинейная. Периодические сигналы можно представить рядом Фурье
y = f(x) = q(A)Asin + q1(A)Acos + yвч ,
где q(A) и q1(A) - коэффициенты ряда Фурье для первых гармоник синуса и косинуса, которые определяются по формулам:
,
(10.1)
![]() ,
(10.2)
,
(10.2)
где y - сигнал на выходе НЭ при изменении фазы входного сигнала x от - до ,
yвч - высокочастотные составляющие (высшие гармоники) в сигнале y.
Так как на выходе НЭ включен фильтр нижних частот, который не пропускает на выход высшие гармоники сигнала y, тогда на его выходе будут присутствовать только первые гармоники в сигнале y, т. е.
yвых = q(A)Asin + q1(A)Acos.
Так как , откуда , здесь - символ дифференцирования.
Следовательно .
От гармонических сигналов x и y перейдем к комплексным сигналам путем замены p=j , тогда получим:
Y(jt) = X(jt)[q(A) + jq1(A)] (10.3)
Это соотношение устанавливает связь между первой гармоникой комплексных сигналов на входе и выходе НЭ, для которого введем понятие нелинейного ККП
WН(A) = q(A) + jq1(A) (10.4)
тогда Y(jt) = X(jt)WН(A).
Определим коэффициенты q(A) и q1(A) для нелинейных элементов, характеристики которых приведены на рис.10.1.в и 10.1.з.
Для идеального ограничителя (рис.10.1.в) получим:
13. Анализ поведения нелинейных систем на фазовой плоскости.
Метод
фазовой плоскости применяется
для анализа нелинейных систем,
порядок
которых не выше второго. На плоскости
с координатами ![]() и
и![]() ,
где
–
ошибка системы или какой-либо другой
сигнал, строится траектория движения
системы. Плоскость и траекторию движения
систем называют фазовыми.
По характеру фазовой траектории
оценивается качество работы
системы.
,
где
–
ошибка системы или какой-либо другой
сигнал, строится траектория движения
системы. Плоскость и траекторию движения
систем называют фазовыми.
По характеру фазовой траектории
оценивается качество работы
системы.
Метод фазовой плоскости используется для исследования нелинейных САУ, линейная часть которых с достаточной для решения практических задач точностью может быть описана дифференциальным уравнением второго порядка.
|
|
|
|
Фазовой
плоскостью называется
плоскость, на которой изображается
изменение какой-либо переменной
величины ![]() в
функции скорости ее изменения:
в
функции скорости ее изменения:![]() . Оси
времени на фазовой плоскости нет, но
каждому моменту времени соответствует
определенная точка (изображающая
точка),
абсцисса и ордината которой равны
соответственно значению сигнала и
скорости его изменения в данный момент
времени. При изменении времени изображающая
точка перемещается по определенной
траектории, называемой фазовой
траекторией.
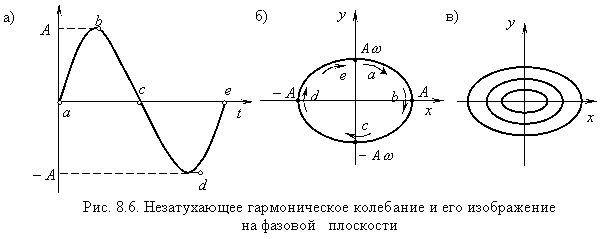
Определим
выражение фазовой траектории для
сигнала
,
представляющего собой незатухающие
гармонические колебания с амплитудой
. Оси
времени на фазовой плоскости нет, но
каждому моменту времени соответствует
определенная точка (изображающая
точка),
абсцисса и ордината которой равны
соответственно значению сигнала и
скорости его изменения в данный момент
времени. При изменении времени изображающая
точка перемещается по определенной
траектории, называемой фазовой
траекторией.
Определим
выражение фазовой траектории для
сигнала
,
представляющего собой незатухающие
гармонические колебания с амплитудой ![]() и
частотой
и
частотой ![]() (рис.
8.6,
а):
(рис.
8.6,
а):
![]() .
(8.1)
Скорость
изменения такого сигнала
равна:
.
(8.1)
Скорость
изменения такого сигнала
равна:
![]() .
(8.2)
Выражая
из уравнений (8.1) и (8.2)
.
(8.2)
Выражая
из уравнений (8.1) и (8.2) ![]() и
и ![]() ,
на основании основного тригонометрического
тождества
получим:
,
на основании основного тригонометрического
тождества
получим:
![]() .
(8.3)
Следовательно,
незатухающие гармонические колебания
изображаются на фазовой плоскости в
виде эллипса (рис. 8.6, б) с полуосями А и
.
(8.3)
Следовательно,
незатухающие гармонические колебания
изображаются на фазовой плоскости в
виде эллипса (рис. 8.6, б) с полуосями А и ![]() .
При
изменении времени изображающая
точка, будет
перемещаться вдоль эллипса по часовой
стрелке с периодом колебания
.
При
изменении времени изображающая
точка, будет
перемещаться вдоль эллипса по часовой
стрелке с периодом колебания ![]() .
Для
различных амплитуд А при
заданной частоте
можно
построить семейство таких эллипсов,
вложенных один в другой (рис. 8.6, в).
Совокупность фазовых траекторий
нелинейной системы, соответствующих
различным значения ее параметров или
начальных условий, называется фазовой
картиной (фазовым портретом).
.
Для
различных амплитуд А при
заданной частоте
можно
построить семейство таких эллипсов,
вложенных один в другой (рис. 8.6, в).
Совокупность фазовых траекторий
нелинейной системы, соответствующих
различным значения ее параметров или
начальных условий, называется фазовой
картиной (фазовым портретом).
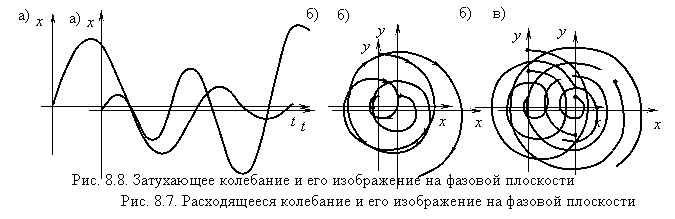 В
случае расходящегося колебательного
процесса (рис. 8.7, а) амплитуда колебаний
увеличивается и соответствующая
такому процессу фазовая траектория
будет иметь вид расходящейся
логарифмической спирали (рис. 8.7, б).
Наоборот, затухающий
колебательный процесс (рис. 8.8,
а) на фазовой плоскости изображается в
виде логарифмической спирали, сходящейся
к началу координат (рис. 8.8, б). Фазовые
портреты, соответствующие различным
значениям начальных условий для таких
процессов приведены соответственно на
рис. 8.7, в и рис. 8.8, в.
Таким
образом, по виду фазовой траектории
можно наглядно судить об устойчивости
системы.
В
случае расходящегося колебательного
процесса (рис. 8.7, а) амплитуда колебаний
увеличивается и соответствующая
такому процессу фазовая траектория
будет иметь вид расходящейся
логарифмической спирали (рис. 8.7, б).
Наоборот, затухающий
колебательный процесс (рис. 8.8,
а) на фазовой плоскости изображается в
виде логарифмической спирали, сходящейся
к началу координат (рис. 8.8, б). Фазовые
портреты, соответствующие различным
значениям начальных условий для таких
процессов приведены соответственно на
рис. 8.7, в и рис. 8.8, в.
Таким
образом, по виду фазовой траектории
можно наглядно судить об устойчивости
системы.