

25. Шариковые червячно-реечные передачи.
Винтореечная шариковая передача представляет собой короткий шариковый ходовой винт, который в результате вращения перемещается по длинной червячной рейке. Винтореечная передача предназначена для привода подач в станках с большой длиной хода. Червячную рейку укрепляют вдоль станины. Винтореечные передачи характеризуются высоким КПД. Для нормальной работы винтореечной передачи необходимо обеспечить, чтобы допуск, плоскостности и конусности составлял 0,005—0,008 мм на всей длине хода.
Шариковый винтореечный привод подач (рис.106) состоит из редуктора с высокомоментным электродвигателем А постоянного тока.
Редуктор имеет одну пару зубчатых колес 2, 21 с передаточным отношением 1 : 2 и паразитное зубчатое колесо 5 для того, чтобы можно было увеличить межцентровое расстояние.
Зазор винтореечной передачи устраняют путем разворота разрезного зубчатого колеса 5 болтом-эксцентриком 4. В качестве устройства обратной связи применен вращающийся трансформатор 3 с ценой оборота фазы 2 мм. Короткий шариковый ходовой винт 9 вращается в жестких опорах. Радиальные силы воспринимаются игольчатыми подшипниками 13, осевые — упорными роликовыми подшипниками 8. Осевой предварительный натяг осуществляется благодаря компенсаторному кольцу 12. В теле винта имеется канал возврата шариков 19. Корпус 15 с опорами винта крепится к подвижной каретке через две гибкие планки 14 и 16, которые имеют увеличенную жесткость в продольном направлении и дают возможность корпусу с ходовым винтом перемещаться в поперечном направлении (к червячной рейке 17).
Это перемещение создается от гидроцилиндра 10 мембранного типа и необходимо для предварительного натяга в паре ходовой винт — червячная рейка. Одна часть шариков упирается в резьбовую поверхность 18 рейки 17 под углом 45° с одной стороны, а другая часть шариков — под углом 45° с противоположной стороны. Таким расположением шариков достигается отсутствие зазоров и оптимальная жесткость привода.
Средний виток ходового винта по сравнению с остальными витками имеет увеличенный шаг на 0,34 мм при основном шаге резьбы 20 мм.
Ходовой винт 9 с выходным валом 22 редуктора соединяется через пластинчатую муфту 6 – 20 - 7. Шарики в нижней (на рисунке) половине винта контактируют с червячной рейкой, в то время как шарики в верхней половине винта контактируют с внутренней поверхностью полукольца 11 корпуса 15.
Червячную рейку собирают в блоки на специальной плите (платформе), соблюдая малый допуск на шаг резьбы.
С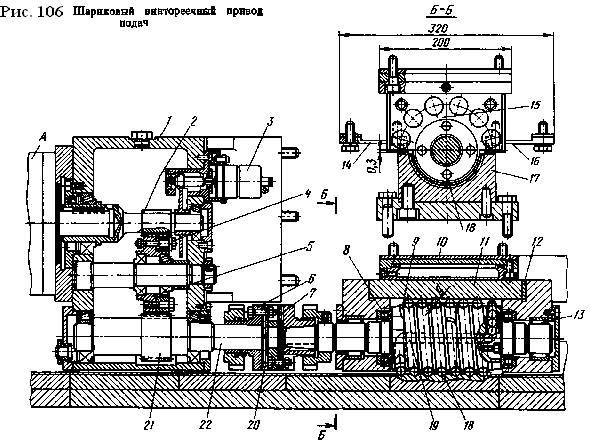 огласно
исследованиям, проведенным В. 3.
Миклишанским, определены технико-экономические
показатели в зависимости от типов
применяемых приводов подач по продольной
координате X на портальном продольно-фрезерном
станке 2ФП-231
огласно
исследованиям, проведенным В. 3.
Миклишанским, определены технико-экономические
показатели в зависимости от типов
применяемых приводов подач по продольной
координате X на портальном продольно-фрезерном
станке 2ФП-231
Табл. 30
|
Зубчатое колесо-рейка, m=4, z=20, i=60
|
Винт-рейка качения с полукруглым профилем, D=100 мм, d=10мм |
Жесткость привода координаты, даН/мкм |
12 |
100 |
Наименьшая собственная частота колебаний (с учетом инерции портала), Гц |
20 |
57 |
Допустимый коэффициент усиления по скорости |
10-12 |
30-40 |
Тип датчика в измерительной системе |
Измерительная рейка + вращающийся трансформатор |
Вращающийся трансформатор
|
КПД привода |
0,4 -0,7 |
0,9 – 0,93 |
Точность обработки (в условных единицах) |
1 |
2,5 – 3,5 |
Точность позиционирования, мм |
±0,05/1000 |
±0,025/1000 |
Наибольшая подача, мм/мин, при допустимой погрешности, мм: ±0,05 ±0,1
|
50 – 100 100 - 150 |
300 – 400 300 - 400 |
Коэффициент повышения .производительности станка |
1 |
1,32 |