

АЭП типовых производственных механизмов и технологических комплексов
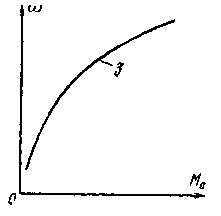
Механические характеристики центробежных насосов, компрессоров, вентиляторов.
![]()
где MС — момент сопротивления производственного механизма при скорости ,
M0 — момент сопротивления трения в движущихся частях механизма;
МС,Н0М — момент сопротивления при номинальной скорости НОМ;
K— показатель степени, характеризующий изменение момента сопротивления при изменении скорости при K=2 –получается вентиляторная хар-ка.
2. Позиционный электропривод. Точность остановки и производительность позиционирования
Позиционный электропривод: Позиционный электропривод обеспечивает регулирование положения исполнительного органа рабочей машины. Он выполняет перемещение исполнительного органа из исходного в требуемое положение и его остановку с необходимой точностью. Этот электропривод должен также обеспечивать регулирование скорости и момента двигателя с хорошими статическими и динамическими качествами, облегчающими условие регулирования положения.
В позиционном электроприводе используются специальные устройства и датчики, контролирующие положение и перемещение.
Схемы электроприводов осуществляют позиционирование с помощью датчиков положения. В резисторных электроприводах постоянного тока при питании от сети снижение скорости перед остановкой при позиционировании осуществляется по схеме шунтирования якоря. В резисторных асинхронных электроприводах многоскоростные двигатели датчиком ДИЗ переключаются на пониженную скорость, а в односкоростных используется схема включения динамического торможения.
Точность остановки и производительность (время дотягивания) позиционирования зависят от нагрузки привода и его электромеханической характеристики, статизм которой выбирается из заданной точности остановки. При различных нагрузках электропривода торможение происходит при разных значениях замедления, что снижает точность остановки.
Поэтому используется двух- и многоступенчатое торможение с большой скорости на малую скорость дотягивания, а с нее – до скорости останова. для этого устанавливают два датчика, из которых первый ( ДИЗ – датчик импульса замедления) подает команду на начало торможения с большой рабочей скорости, а второй (ДТО – датчик точной остановки) – на отключение двигателя со скорости дотягивания.
При работе двух двигателей с фазными роторами на один вал пониженная скорость обеспечивается переводом одного из двигателей в режим динамического торможения.
В электроприводах постоянного тока при питании ДПТ от управляемого преобразователя снижение скорости при остановке обеспечивается снижением задающего напряжения.
3. Вентильные каскады. Рекуперируемая в сеть энергия
В ентильный
каскад представляет собой привод с
регулированием частоты вращения
асинхронного
двигателя с фазным ротором,
у которого энергия скольжения через
кольца ротора, выпрямитель и сглаживающий
дроссель возвращается обратно в сеть
с
помощью инвертора, ведомого сетью.
Обычно
вентильный каскад применяется в
электроприводах, у которых пределы
регулирования частоты вращения не
превышают
1,5—2.
ентильный
каскад представляет собой привод с
регулированием частоты вращения
асинхронного
двигателя с фазным ротором,
у которого энергия скольжения через
кольца ротора, выпрямитель и сглаживающий
дроссель возвращается обратно в сеть
с
помощью инвертора, ведомого сетью.
Обычно
вентильный каскад применяется в
электроприводах, у которых пределы
регулирования частоты вращения не
превышают
1,5—2.
Различают две группы каскадных схем: электрический и электромеханический каскад.
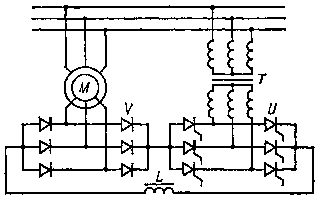
Рис. 1.5. Схема вентильного каскада.
Рекуперативное торможение — вид электрического торможения, при котором электроэнергия, вырабатываемая тяговыми электродвигателями, работающими в генераторном режиме, возвращается в электрическую сеть.