

3. Напрямок сили тяги трактора при агрегатуванні причіпних і напівпричіпних машин.
Під час експлуатації сільськогосподарських агрегатів, особливо з причіпними машинами, за певних умов роботи можуть виникати небажані явища, пов'язані з перерозподілом навантажень на опорні елементи машини. При проектуванні причіпних і напівпричіпних сільськогосподарських машин варто звертати особливу увагу на правильний вибір параметрів з’єднувальних елементів машини до трактора. Крім усього, при консольному розташуванні машини стосовно трактора тільки правильно обрані розміри з’єднувальних елементів і розташування опорних коліс забезпечують стійке прямолінійне прямування причіпною і напівпричіпною машини в роботі.
4. Окремі випадки агрегатування сільськогосподарських машин.
Маючи велику розмаїтість технологій у рільництві, ми безумовно маємо і велику розмаїтість сільськогосподарських машин для виконання робіт по цих технологій. Як показує практика, всю цю розмаїтість сільськогосподарських машин не можна виписати в якісь тільки класичні схеми агрегатування. Тому в деяких випадках припадає розглядати приватні задачі по агрегатуванню окремих сільськогосподарських машин. Роздивимося деякі приклади.
4.1. Агрегатування машин із консольним розташуванням їх стосовно трактора. До цієї групи машин ставляться насамперед збиральні машини (косарки, жатки, комбайни), тому що технологія роботи таких агрегатів складається в тому, що по неприбраному полю повинна йти тільки машина (рис. 36), а енергетичний засіб (трактор) - тільки по прибраній частині поля.
Найбільше характерним прикладом є збиральні агрегати з напівпричіпними машинами, що являють собою асиметричну систему, у який машина має знижену стійкість ходу в горизонтальній площині в зв'язку з можливістю розгортання її по годинній стрілці навколо точки О причепа до трактора (рис. 36, 37).

Рис. 36. 1 – трактор; 2 – машина
Рис. 37. Розрахункова схема по визначенню стійкості ходу машини: 1 - трактор; 2 - машина; 3 - зовнішнє опорне колесо (башмак); 4 - внутрішнє опорне колесо (башмак); 5 – сниця
При
розрахунку стійкості варто враховувати
сили, що діють на машину через її робочі
органи,
;
сили опору перекочуванню коліс
![]() і
і
![]() ;
реакції ґрунту на колеса
;
реакції ґрунту на колеса
![]() і
і
![]() від бічного зсуву; сили ваги машини, що
припадають на колеса
від бічного зсуву; сили ваги машини, що
припадають на колеса
![]() і
і
![]() .
.
Щоб хід машини був стійким, і було відсутнім розгортання її навколо точки причепа трактора, необхідно суму моментів усіх сил щодо точки О причепа трактора дорівняти до нуля:
![]()
Необхідні розміри довжини сниці розраховують по формулі
![]() ,
,
де
![]() ;
- коефіцієнт тертя колеса об ґрунт,
;
- коефіцієнт тертя колеса об ґрунт,
Таким чином, для зменшення розмірів сниці необхідно збільшувати масу машини (можна баластувати), що не завжди раціонально. Щоб не збільшувати значно розмір , знайдені деякі конструктивні рішення приєднання машини до трактора з застосуванням пружинних компенсаторів із перехідними ланками і без них, за допомогою яких вдасться декілька компенсувати момент, що розвертається, із вмиканням частин зчіпних сил трактора через ці механізми.
4.2. Агрегатування причіпних плугів.
Стійкий хід причіпного тракторного плуга на заданій глибині опрацювання ґрунту і при відомій ширині захвату буде забезпечений за умови рівноваги сил, що діють на плуг у вертикальній і горизонтальній площинах.
У
вертикальній площині на плуг діють такі
сили (рис. 38):
![]() - сила тяги;
- сила тяги;
![]() - проекція результуючої на площині
- проекція результуючої на площині
![]() елементарних сил опору ґрунту, що
переборюються корпусами;
елементарних сил опору ґрунту, що
переборюються корпусами;
![]() -
результуюча сила тертя польових дошок
об дно борозни;
-
результуюча сила тертя польових дошок
об дно борозни;![]() ,
,
![]() ,
,
![]() -
реакція відповідного польового,
борозневого і заднього колеса з
урахуванням сил опору коченню;
-
сила ваги плуга.
-
реакція відповідного польового,
борозневого і заднього колеса з
урахуванням сил опору коченню;
-
сила ваги плуга.
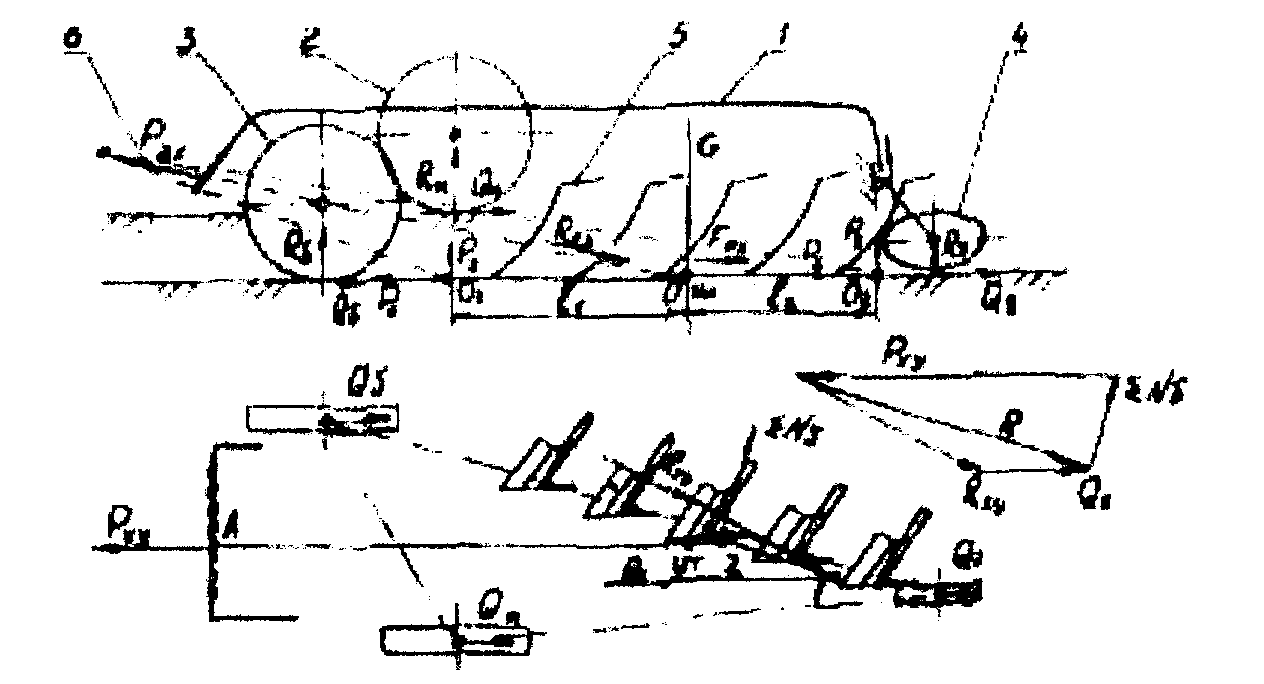
Рис. 38. Розрахункова схема по визначенню стійкості ходу причіпного плуга: 1 - рама плуга; 2 - польове колесо; 3 – борознове колесо; 4 – заднє колесо; 5 – корпус плуга; 6 – причіп.
Особливістю роботи плуга є те, що крім сили тяжіння плуга на стійкість його ходу істотно впливають сили опору ґрунту на корпуса. Тому як показали дослідження і практика, найвигіднішим із погляду стійкості ходу напрямком вектора сили тяги Рzx трактора є таким, коли він буде проходити через слід О центру ваги плуга, розташованого на дні борозни.
Так, якщо напрямок сили тяги перетинає дно борозни перед слідом центру ваги в точці О1, то передні корпуса плуга будуть ринутися опрацьовувати ґрунт на меншу глибину, а задні - на велику. Заднє колесо буде перевантажено, а плуг буде працювати хитливо. І навпаки, якщо напрямок сили тяги проходить за слідом центру ваги (допустимо у точці О2), то передні корпуса будуть ринутися до заглиблення, задні до виглиблення, польове і борознове колеса переобтяжуються, плуг йде в борозні хитливо, погіршується якість оранки, збільшується знос підшипників коліс і різко підвищується тяговий опір плуга.
Тому конструктору необхідно розробляти таку конструкцію передньої з’єднувальної частини рами плуга, щоб можна було шарнірне кріплення причепа переставляти по висоті в залежності від глибини оранки і типу трактора. Практично це дозволить відрегулювати напрямок сили тяги трактора таким чином, щоб забезпечувалася нормальна стійка робота плуга, тобто щоб напрямок сили тяги проходив через слід центру ваги.
У
горизонтальній площині на плуг діють
горизонтальні складові тих же сил, тобто
![]() -
горизонтальна складова сили тяги;
-
горизонтальна складова сили тяги;
![]() -
проекція результуючої на площину
-
проекція результуючої на площину
![]() елементарних сил опору ґрунту, що
переборюються корпусами;
елементарних сил опору ґрунту, що
переборюються корпусами;
![]() - результуюча сила тиску польових дошок
об стінки борозен, а також сили
- результуюча сила тиску польових дошок
об стінки борозен, а також сили
![]() ,
,
![]() ,
,
![]() опір коліс перекочуванню.
опір коліс перекочуванню.
Для
визначення напрямку сили тяги і розміру
шуканих сил спочатку відомим засобом
додавання рівнобіжних сил визначаємо
розмір і напрямок рівнодіючої сили
![]() опору
коліс. Потім будуємо силовий багатокутник
і визначаємо рівнодіючу
сил
опору
коліс. Потім будуємо силовий багатокутник
і визначаємо рівнодіючу
сил
![]() і
.
Далі, на схемі плуга знаходимо точку 1
перетинання векторів сил
і
,
і через неї проводимо пряму, рівнобіжну
рівнодіючої
,
до перетинання в точці 2
із вектором сили
.
Потім у багатокутнику сил силу
розкладаємо по напрямках 2-А
і
;
Отримані відрізки в багатокутнику дають
значення сил Рху,
і
.
Причому напрямок 2-А,
тобто напрями сили тяги
і
.
Далі, на схемі плуга знаходимо точку 1
перетинання векторів сил
і
,
і через неї проводимо пряму, рівнобіжну
рівнодіючої
,
до перетинання в точці 2
із вектором сили
.
Потім у багатокутнику сил силу
розкладаємо по напрямках 2-А
і
;
Отримані відрізки в багатокутнику дають
значення сил Рху,
і
.
Причому напрямок 2-А,
тобто напрями сили тяги
![]() в горизонтальній площині, повинна
розташовуватись паралельно до стінки
борозни, щоб забезпечувалась прямолінійна
стійкість руху плуга. Слід відмітити,
що положення точки 2
не завжди співпадає з положенням сліду
центру тяжіння плуга, але звичайно вона
знаходиться поблизу і часто в вертикальній
площині розміщення сліду центра тяжіння.
в горизонтальній площині, повинна
розташовуватись паралельно до стінки
борозни, щоб забезпечувалась прямолінійна
стійкість руху плуга. Слід відмітити,
що положення точки 2
не завжди співпадає з положенням сліду
центру тяжіння плуга, але звичайно вона
знаходиться поблизу і часто в вертикальній
площині розміщення сліду центра тяжіння.
Таким чином, при незмінному положенні точки 2 (на схемі плуга) на напрямок лінії тяги і розмір опору плуга Рху впливає положення точки А (місця шарнірного з'єднання причепа з плугом). Якщо точку А причепа перенести вправо від нормального її положення, то плуг під дією бічної складової сили буде ринутися відхилятися вбік зораного поля, польові дошки будуть відходити від стінок борозен, зменшиться ширина захвату плуга і, хоча тяговий опір зменшиться, якість роботи плуга погіршиться.
При зсуві точки причепа вліво від нормального її положення виникає бічна сила в оберненому напрямку, під дією якої плуг ринеться повернутися вбік незораного поля, збільшується сила тертя між польовими дошками і стінками борозен, стінки руйнуються, засипаючи ґрунтом дно борозни, збільшується тяговий опір плуга, і якість оранки стає незадовільною.
У такий спосіб і тут конструктору необхідно передбачити в конструкції передка плуга можливість переміщення шарніра А по ширині плуга в залежності від умов роботи і типу трактора з тим, щоб напрямок 2-А (напрямок сили тяги трактора Рху) завжди можна було б встановити паралельно стінці борозни.
Для
перебування положення сліду центру
ваги плуга на опорній площині зважуванням
на платформних вагах визначають опорні
реакції коліс:
![]() - борознового,
- борознового,
![]() -
польового,
-
польового,
![]() -
заднього. Потім вимірюють відстані а,
в,
с,
d
між точками опор коліс і в прийнятому
масштабі наносять на папір обрис опорного
трикутника ПБЗ
плуга (рис. 39).
-
заднього. Потім вимірюють відстані а,
в,
с,
d
між точками опор коліс і в прийнятому
масштабі наносять на папір обрис опорного
трикутника ПБЗ
плуга (рис. 39).
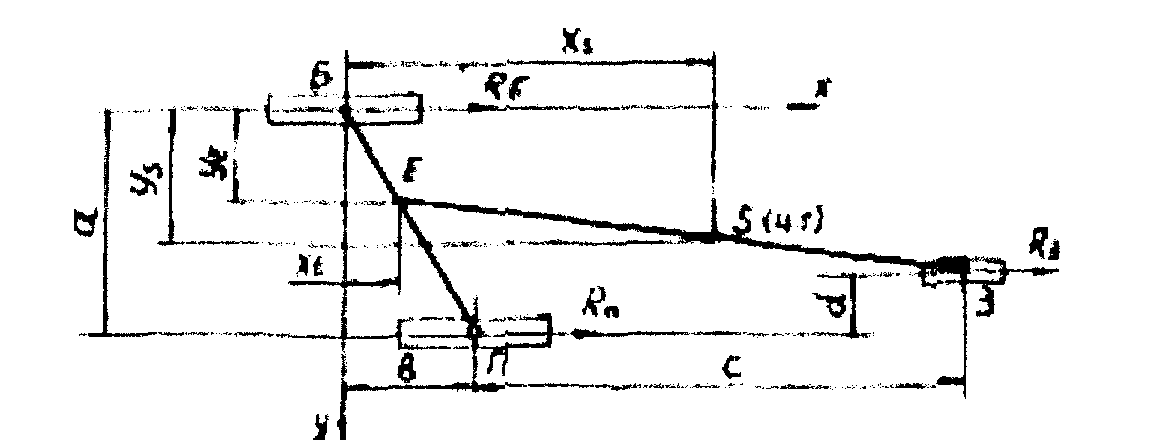
Рис. 39. Визначення сліду центру ваги по реакціях опор
За
початок координат можна прийняти точку
Б.
Далі знаходять точку додатка рівнодіючих
паралельних опорних реакцій
,
![]() ,
припустимо точку Е
(реакції
коліс для наочності повернені на 90), і
тоді з умови рівності моментів щодо
осей х,
у
знаходять координати точки Е:
,
припустимо точку Е
(реакції
коліс для наочності повернені на 90), і
тоді з умови рівності моментів щодо
осей х,
у
знаходять координати точки Е:
![]() ;
;
![]() .
.
Потім складають рівняння відносно точки S – слід центра тяжіння:
![]() ;
;
![]() .
.
Підставляючи
в ці рівняння знайдені значення
![]() і
і
![]() ,
і перетворюючи їх, знаходять координати
сліду центра тяжіння плуга на опорній
площині:
,
і перетворюючи їх, знаходять координати
сліду центра тяжіння плуга на опорній
площині:
![]() ;
;
![]() .
.
Отримані
значення
![]() і
і
![]() множать на прийнятий масштаб, відкладають
на опорні площини плуга і відмічають
точку S
– слід центра тяжіння.
множать на прийнятий масштаб, відкладають
на опорні площини плуга і відмічають
точку S
– слід центра тяжіння.
4.3. Агрегатування зубових борін.
Зубові борони, хоча і не мають ніяких опорних елементів у виді коліс, ковзанок або башмаків, проте стійкість ходу цих знарядь також забезпечується лише правильним напрямком сили тяги трактора (рис. 40).
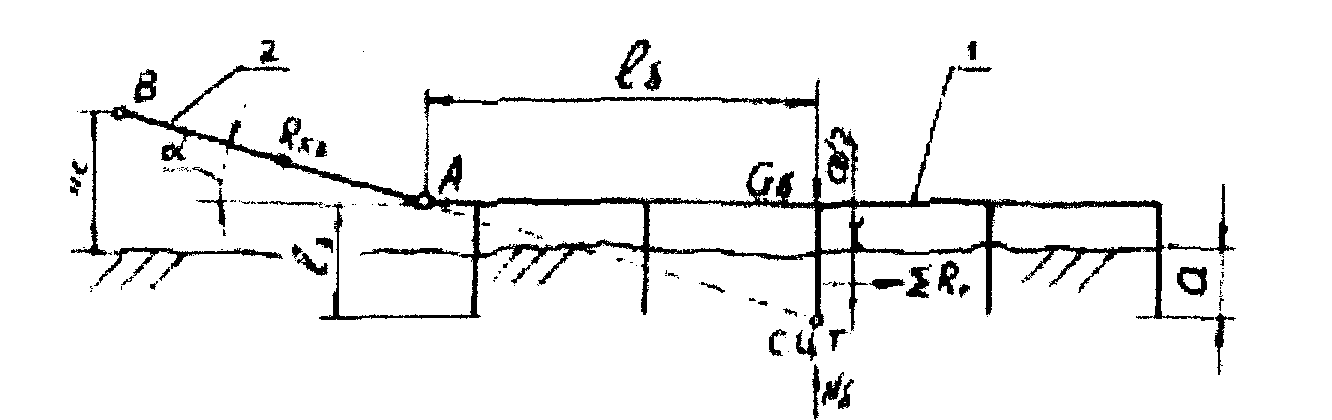
Рис. 40. Розрахункова схема до визначення умов рівноваги зубової борони: 1 - секція борони; 2 – повідець.
Рівновагу зубової борони розглядають тільки в повздошно-вертикальній площині, тому що сили, що діють у горизонтальній площині, взаємно врівноважуються.
У
вертикальній площині на борону діють
такі сили:
![]() - сила ваги борони;
- сила ваги борони;
![]() - рівнодіюча вертикальних сил реакцій
ґрунту на зуби, прикладена в центрі
ваги;
- рівнодіюча вертикальних сил реакцій
ґрунту на зуби, прикладена в центрі
ваги;
![]() - рівнодіюча горизонтальних сил опору
ґрунту (нормальних тисків і сил тертя,
для практичних цілей можна скористатися
вираженням
- рівнодіюча горизонтальних сил опору
ґрунту (нормальних тисків і сил тертя,
для практичних цілей можна скористатися
вираженням
![]() ,
де k
– опіh
одного зуба);
,
де k
– опіh
одного зуба);
![]() -
сила тяги трактора.
-
сила тяги трактора.
Стійке прямування борони можливо при проходженні напрямку сили тяги через слід центру ваги, що при заданих параметрах борони залежить від довжини повідця АВ=ln і висоти точки причепа на брусі зчіпки hc. Умовою рівноваги в аналітичній формі буде необхідним і достатнім рівність нулю таких рівнянь:
![]() ;
;
![]() ;
;
![]() .
.
Для
більшості конструкцій борін
α=14…17º,
![]() мм. Усувають нестійкість ходу борони
зміною кута а,
регулюючи висоту точки причепа борони
на брусі зчіпки hс.
мм. Усувають нестійкість ходу борони
зміною кута а,
регулюючи висоту точки причепа борони
на брусі зчіпки hс.