

6. Математична модель
Математична модель являє собою схемне й аналітичне зображення досліджуваного технологічного процесу, виконуваного робочим органом машини або її окремого елемента; призначена вона для визначення основних геометричних і кінематичних характеристик (параметрів) технологічних процесів і робочих органів
На схемному зображенні, що припускається виконувати без дотримання масштабу, рекомендується матеріал, що необхідний для упорядкування відповідних аналітичних залежностей, для аналізу протікання технологічного процесу. При цьому варто пам'ятати, що конструктор у своїй діяльності не розробляє які-небудь нові математичні моделі, а використовує тільки відомі і перевірені на практиці. Частіше усього такими моделями є рівняння механіки. При проектуванні сільськогосподарських машин використовуються як математичні моделі, що зустрічаються часто, за допомогою яких можна виконати розрахунки різноманітних технологічних процесів роботи робочих органів (при обертально-поступальному русі робочого органа прямування частки матеріалу по горизонтальній і похилій площинам, по ротаційних поверхнях і ін., так і сугубо приватні моделі, отримані в результаті наукових досліджень, як правило, оригінальних конструкцій розроблювального або подібного йому робочого органа.
Роздивимося для приклада в якості математичної моделі, що зустрічається часто, модель обертально-поступального прямування робочого органа.
Нехай радіус обертається навколо горизонтальної осі О, що у свою чергу переміщається вздовж осі ОХ (рис. 25).
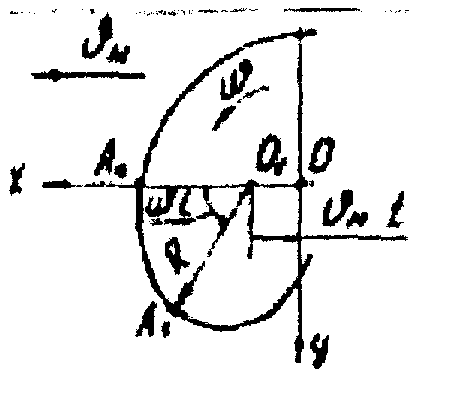
Рис. 25. Схема до визначення траєкторії руху точки
при обертально-поступальному русі.
Через
проміжок часу
![]() центр обертання О
переміститься по осі ОХ
у
нове положення О1,
пройшовши шлях
центр обертання О
переміститься по осі ОХ
у
нове положення О1,
пройшовши шлях
![]() ,
а радіус
повернеться
на кут
,
а радіус
повернеться
на кут
![]() ,
де
поступальна
швидкість центру обертання, а
,
де
поступальна
швидкість центру обертання, а
![]() - кутова швидкість радіуса
.
- кутова швидкість радіуса
.
У результаті цього прямування вершина Ао радіуса перейде з положення А0 в положення А1 і її координати будуть визначатися рівняннями
![]() (2)
(2)
Рівняння (2) характеризує траєкторію абсолютного прямування точки А в параметричній формі.
В конкретних випадках конструкцій робочих органів точкою А може бути лезо ножа, планка мотовила й ін. Тобто рис. 25 і рівняння (2) можуть бути вираженням математичної моделі технологічного процесу роботи ножів ґрунтових фрез, тримачів посадкових апаратів, ножів ріжучих апаратів ротаційних косарок, пальців підбирачів валків, планок мотовила і т.д.
Траєкторія точки А являє собою циклоїду. Причому геометрична форма циклоїди буде залежати від так званого показника кінематичного режиму. що виражають залежністю
![]()
де V - колова швидкість кінця А радіуса R.
Прийнявши
![]() ,
а
,
а
![]() ,
одержимо:
,
одержимо:
![]() або
або
![]() .
Підставивши
в рівняння (2)замість
і
.
Підставивши
в рівняння (2)замість
і
![]() вираження
вираження
![]() й
і
замінивши
й
і
замінивши
![]() ,
будемо мати
,
будемо мати
![]()
Тоді,
якщо
![]() <
1, траєкторія точки А
буде мати форму укороченої циклоїди
(рис. 26,а), якщо
= 1 - чистої циклоїди (рис. 26,б), якщо
>
1, циклоїда буде подовженої, так званою
трохоїдою (рис. 26, в).
<
1, траєкторія точки А
буде мати форму укороченої циклоїди
(рис. 26,а), якщо
= 1 - чистої циклоїди (рис. 26,б), якщо
>
1, циклоїда буде подовженої, так званою
трохоїдою (рис. 26, в).

Рис. 26. Варіанти можливих траєкторій прямування точки при різноманітних значеннях показника кінематичного режиму.
Як
випливає з рис. 26. при
<
1 напрямок вектора абсолютної швидкості
![]() точки
А
є незмінним. При
=1
також не змінює свого напрямку, але в
точці повертання кривої траєкторії
абсолютна швидкість її рівна 0. При
>1
абсолютна швидкість в нижній частині
кривої змінює свій напрямок.
точки
А
є незмінним. При
=1
також не змінює свого напрямку, але в
точці повертання кривої траєкторії
абсолютна швидкість її рівна 0. При
>1
абсолютна швидкість в нижній частині
кривої змінює свій напрямок.
Така особливість характеру прямування широко використовується при виборі кінематики руху робочих органів сільськогосподарських машин. Так, для штангових культиваторів (див. рис. 17) траєкторію ребер штанги вибирають з умови < 1, для розсадосадильних апаратів = 1, а для мотовила > 1. Роздивимося докладніше два останніх приклади.
Роботу розсадосадильних секції можна простежити по місцю розташування захвату (рис. 27,а), де положення А - це сам захват перед укладкою в нього розсади, Б - місце, де розсада вкладається вручну в захват, що автоматично її защемляє, положення В - захват звільняється від розсади. У момент звільнення рослини розсади від захвату, коли вона знаходиться ще у відкритій борозні і щоб уникнути нахилу її вперед або тому до моменту присипки коренів ґрунтом, абсолютна швидкість рослини розсади повинна бути близької до нуля. Тому режим роботи для диска з захватами повинен характеризуватися значенням, = 1.

Рис. 27. Функціональні схеми роботи секції розсадосадильна машину (а) і мотовила (б): 1 - сошник; 2 - диск із захватами; 3 - рослина розсади; 4 - накочуючи котки; 5 - мотовило; 6 - ріжучий апарат
Призначення мотовила в жатках і косарках - своїми планками примусово підводити стебла до ріжучого апарату і вкладати зрізані стебла на платформу жатки, тобто планки мотовила в нижній частині повинні мати абсолютну швидкість і напрямком назустріч швидкості машини. Тому режим роботи повинний характеризуватися значенням > 1 для кінця планки мотовила (рис. 27,б).
Як приклад приватної математичної моделі роздивимося аналіз необхідних умов захвату бульб картоплі ложковим-дисковим апаратом. Причому в цьому випадку приймають у вигляді геометричної моделі сферу замість бульб.
При роботі такого апарата, відкрита (без затискача) ложечка проходить крізь прошарок бульб картоплі для заповнення (захвату) її окремою бульбою. Фіксування цієї бульби 2 у ложечці 1 (рис. 28) здійснюється в момент виходу ложечки з бульбою з прошарку картоплі, товщина якого змінюється в ковші апарата що живеться. Тому необхідно вибирати такий режим роботи апарата, при якому бульба не буде випадати з ложечки до фіксації його в ній затискачем.

Рис. 28. Схема дії сил на бульбу в момент її випадання з ложечки:
1 – ложечка; 2 – бульба.
Випадання
бульби з ложечки можливо щодо її або
зовнішнього краю (точка А
на рис. 28) або її внутрішнього краю (точка
В).
При цьому на бульбу будуть діяти такі
сили: G
-
вага бульби; Р(Р1)
-
відцентрова сила інерції; N(N1)
– нормальна реакція; F(F1)
-
дотична реакція ложечки. Умова стійкого
положення бульби в ложечці, при якому
вона не буде випадати назовні:
![]() ,
,
![]() ,
де т
-
маса бульби;
–
кутова швидкість диска з ложечками;
-
відстань від центру обертання диска до
центру ваги бульби.
,
де т
-
маса бульби;
–
кутова швидкість диска з ложечками;
-
відстань від центру обертання диска до
центру ваги бульби.
Звідси максимальна кутова швидкість диска
![]()
У
сучасних картоплесаджалках вихід
ложечки з захопленою бульбою з прошарку
картоплі в ковші, що живиться здійснюється
при куті
![]() .
.
Для того щоб бульба не випадала з ложечки в обернену сторону до фіксації його затискачем, необхідно витримувати умову
![]() або
або
![]() звідки мінімально припустима кутова
швидкість диска
звідки мінімально припустима кутова
швидкість диска
![]() .
.
По
досвідченим даним момент фіксації
бульби в ложечці з зажимом приймають
при куті
![]() .
.
Тоді необхідною умовою нормальної роботи апарату є режим, при якому робоча кутова швидкість диска буде відповідати нерівності
![]()