8) Теорема об условиях равновесия атт. Ур-я равновесия для пространственной сис-мы сил
Теорема равновесия АТТ
Для
того чтобы произвольная система сил
была уравнов-ой необходимо и достаточно
чтобы ее главный вектор и гл момент
относ-но произв-ого полюса В=0 (*)
 =0,
.
=0,
. =0
=0
1)Необходимость.
Имеем: { ,…,
,…, }экв0
По теореме о приведении к 2 силам
{
}экв0
По теореме о приведении к 2 силам
{ ,…,
,…, }экв{
}экв{ .
. По аксиоме о 2 силах {
По аксиоме о 2 силах { ,
, }экв0
}экв0 =-
=- и
и //
// Первое рав-во означ что
Первое рав-во означ что +
+ =0
а силы
=0
а силы и
и образуют пару поскольку она экв нулю.
образуют пару поскольку она экв нулю. M(
M( ,
, )=0
)=0
2)Достаточность.
Исходим из равенства (*).По теореме о
приведении к силе и паре: { ,…,
,…, }экв{
}экв{ .
. где {
где { ,
, }
–пара сил,т.е
}
–пара сил,т.е ,но
,но =0,итак
{
=0,итак
{ ,…,
,…, }экв{
}экв{ ,
, },для
этой пары сил
},для
этой пары сил (
( ,
, )=
)= =0,поэтому
{
=0,поэтому
{ ,
, }экв0,т.е
{
}экв0,т.е
{ ,…,
,…, }экв0.
}экв0.
≤простой системы сил. Пусть xyz-произвольная декартовая система координат. Следствие:уравнения равновесия произв системы сил в скалярной форме:
X: y:
y: z:
z:
 :
: =0
=0 :
: =0
=0 :
: =0
=0
Для системы из n тел получаем 6 n уравнений равновесия.
9)Ур-е равновесия для плоской и сходящейся сис-мы сил, для сис-мы параллельных сил. Статистически определяемые задачи.
Уравнения равновесия АТТ
1)Пусть
система сил-плоская и полюс В вместе с
осями x
и y
лежит в той же плоскости что и сила.
Тогда можно пользоваться ур-ми: X: y:
y: :
: =0
В самом делеɏ
К
=0
В самом делеɏ
К
 перп
перп и
и //
// ,т.ч
остальные 3 ур-ия обратились в тождества.
,т.ч
остальные 3 ур-ия обратились в тождества.
2)
Пусть система сил-параллельная, тогда
ɏ К
 //
// ,тогда
можно пользоваться ур-ми:z:
,тогда
можно пользоваться ур-ми:z:
 :
: =0
=0 :
: =0
В самом делеɏ
К
=0
В самом делеɏ
К
 //
// и
и перп
перп
3)
) Пусть система сил-сходящаяся и линии
действия всех сил проходят через В.
Тогда можно пользоваться ур-ми: X: y:
y: z:
z: Дляɏ К
Дляɏ К
 =0
=0
Задача статистически определима если число неизвестных не превосходит числа ур-ий равновесия. Если в задаче nтел и m неизвестных то в статист опр задачах:m≤3n-плоский случай;m≤6n-простр-ый случай.
11)Законы трения скольжения(при покое). Закон Амантона-Кулона. Задача о трибометре.
Законы трения скольжения:
1)Если тело на которое действует сила трения скольжения находится в покое то модуль ее может принимать любое значение. Случай предельного равновесия-модуль силы тр=макс силе тр
2)Предельная величина силы трения прямопропорциональна модулю нормальной реакции
3)Значение
 не зависит от площади соприкосновения
не зависит от площади соприкосновения
4)
Значение
 зависит материала тел, частоты обработки
пов-ей и т.п
зависит материала тел, частоты обработки
пов-ей и т.п
![]()
Задача о трибометре.
X:Q- =0Q=
=0Q= y:N-P=0
N=P
Подбором груза находим наибольшее
значение Q
при котором брусок будет покоится. В
силу закона Амонтона-Кулона:
y:N-P=0
N=P
Подбором груза находим наибольшее
значение Q
при котором брусок будет покоится. В
силу закона Амонтона-Кулона: макс
макс
 =
= N
так что
N
так что
 =:
=: макс
макс
 /N=
Qмакс/Р
/N=
Qмакс/Р
26. Антисимметричные линейные операторы. Теорема о взаимно однозначном соответствии между векторами и антисимметричными операторами в трехмерном пространстве.
Пусть
х-евклидово векторное пр-во. Линейный
оператор –
антисимметричный, если (
–
антисимметричный, если (
В
общем случае
 =(
=( .
Иная форма определения:
.
Иная форма определения:
Для
компонентов антисимметричного оператора
 в ортонорм. Базисе
в ортонорм. Базисе ≡
≡ =-
=-
Значит,
матрица А оператора
 тоже антисимметрична
тоже антисимметрична
В
частности, при i=j:

Пусть
Z(x)
–пр-во всех
линейных
операторов вида

Присоединенным
представлением алгебры векторов 3-х
мерного пр-ва V
называется
отображение : аd:
V->Z(V),
которое всякому вектору ā сопоставляет
лин. Оператор
 ,
определяемый формулой
,
определяемый формулой

Линейность
оператора
 следует из равенств
следует из равенств
 [
[ =
=
 =k[
=k[
Оператор
 ≡ad
≡ad
 будем
обозначать ă и называть присоединительным
оператором для вектора
будем
обозначать ă и называть присоединительным
оператором для вектора
Теорема: отображение ad: :V->Z(V) устанавливает взаимно-однозначное соответствие между векторами из V и антисимметричными линейными операторами:

Док-во:
в силу
 линейный оператор
линейный оператор , отвечающий вектору
, отвечающий вектору ,
определен однозначно. Проверим, что он
антисимметричный.
,
определен однозначно. Проверим, что он
антисимметричный.
Пусть
{ правый
ортонорм. базис вV,
тогда
правый
ортонорм. базис вV,
тогда
 =
= =>
=> =>
=> ,
так что
,
так что ,
,
так
как
 ,
то и
,
то и
Взаимная
однозначность всякий оператор
 в 3-х мерном пр-ве имеет матр. А указанного
вида; поэтому вектор
в 3-х мерном пр-ве имеет матр. А указанного
вида; поэтому вектор находится
однозначно.
находится
однозначно.
Замечание:
в силу взаимной однозначности
установленного соответствия для всякого
антисимметричного оператора
 однозначно
определен вектор
однозначно
определен вектор =a
=a ,
для которого ă=
,
для которого ă=

Следствие
1: ă
Следствие
2: ă =0
=0
 II
II
 ,
т.к.
,
т.к.
 II
II

Следствие
3: т.к. оператор
ă все векторы,
параллельные
 переводит в 0, то антисем. Операторы в
3-х мерном пр-венеобратимы(обратного
оператора не сущ.)
переводит в 0, то антисем. Операторы в
3-х мерном пр-венеобратимы(обратного
оператора не сущ.)
Вывод: в 3-х мерном пр-ве операции умножения вектора на антисим. оператор эквивалентно операции векторного умножения.
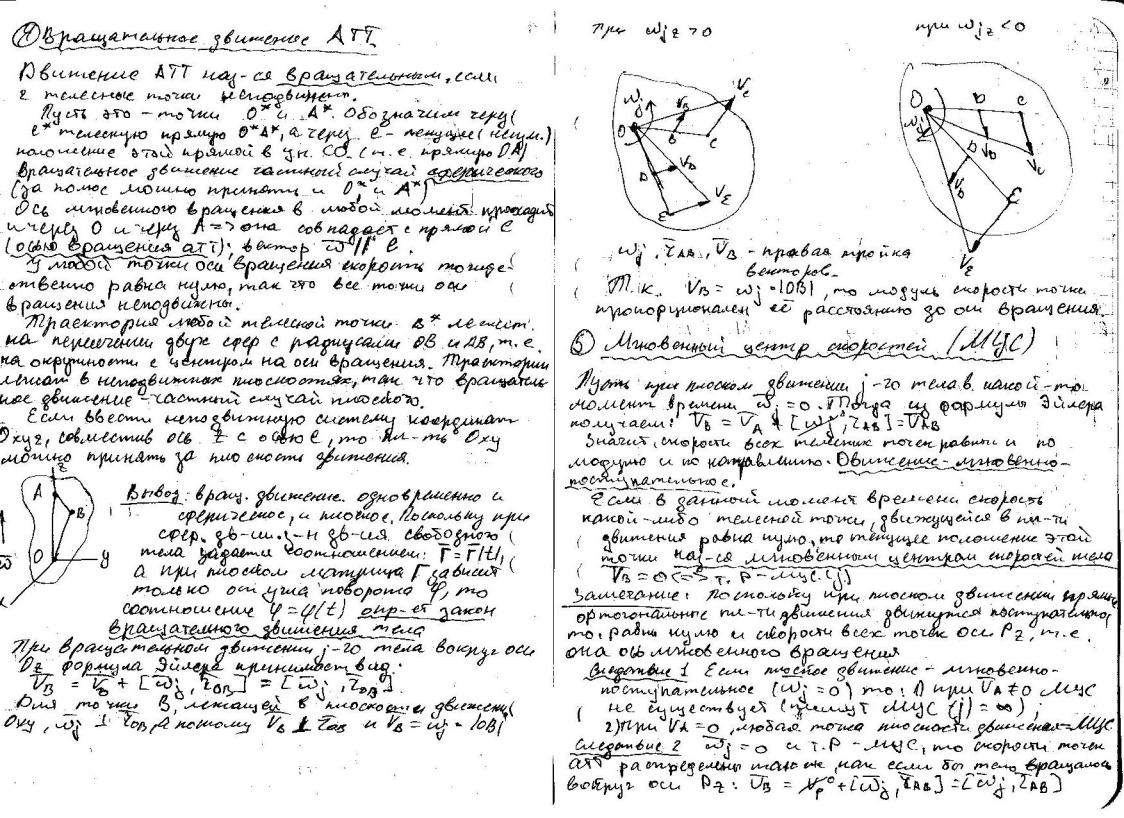
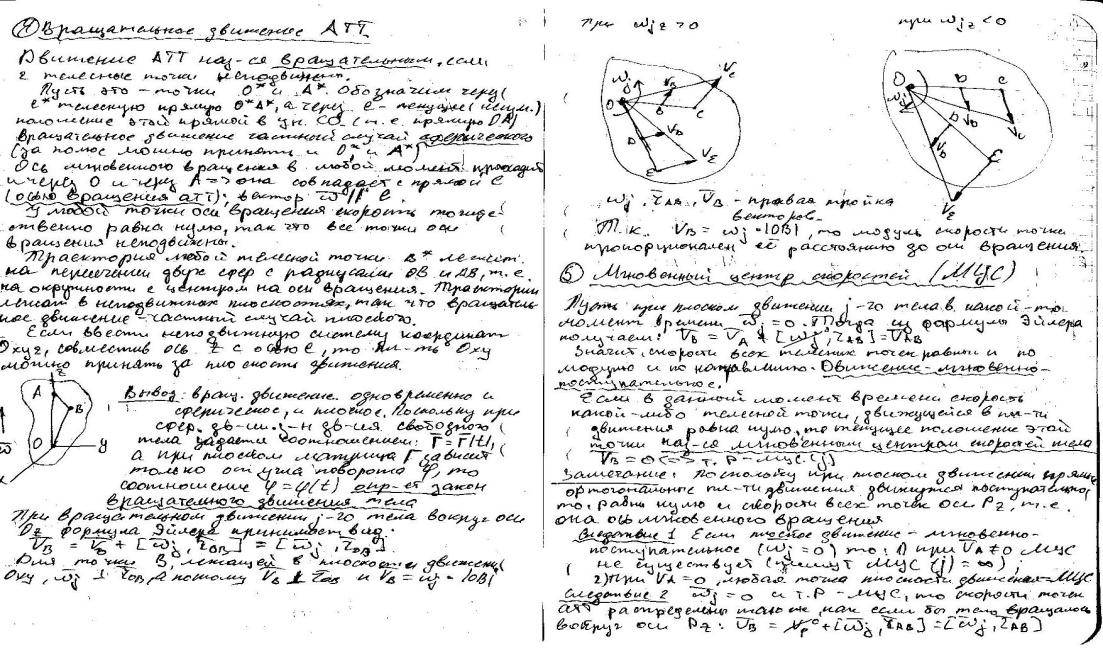
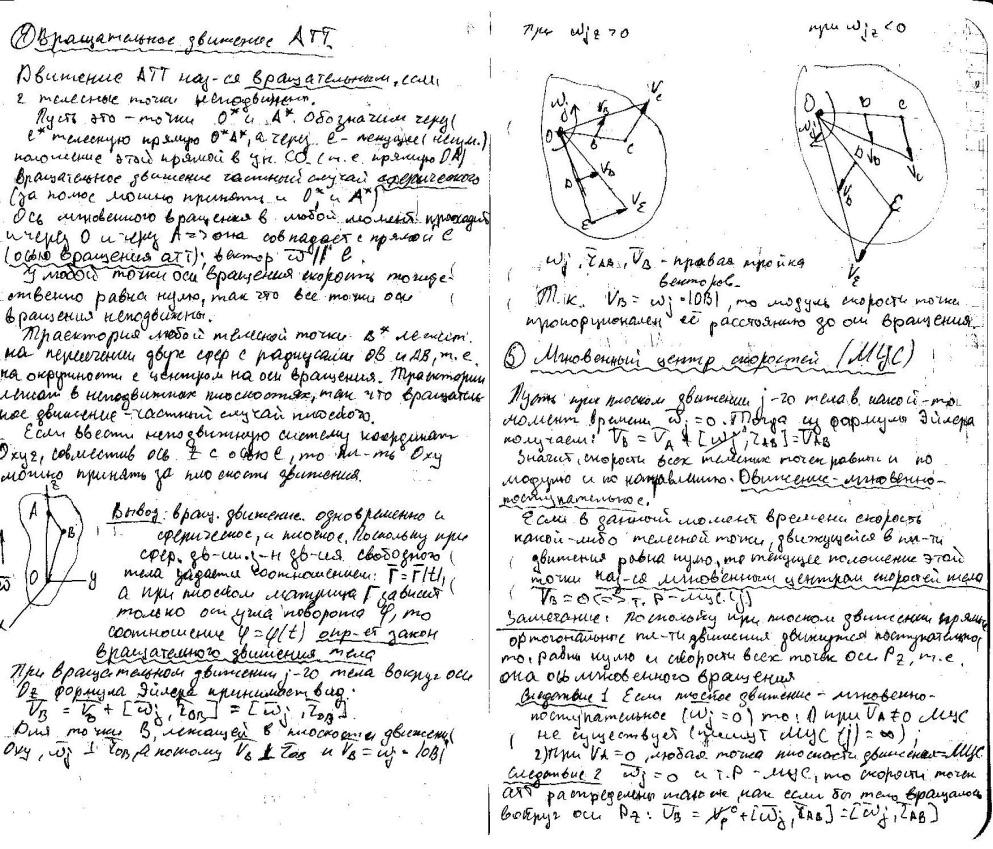
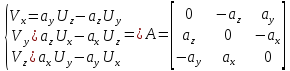
32. Вращательное движение абсолютно твердого тела. Ось вращения. Траектории и скорости телесных точек при вращательном движении.Движение АТТ вращательное, если 2 телесные точки неподвижны. Пусть это точки О* и А*; обозначим через е* телесную прямую А*О*, а через ɭ текущее положение этой прямой в у. н. СО
Вращательное движение – частный случай сферического. Ось мгновенного вращения в любой момент проходит и через точку О и через А => она совпадает и прямой ɭ (осью вращения АТТ)
Вектор
 ll
l
ɭ
ll
l
ɭ
У любой точки оси вращения скорость тождественно равна 0, так что все точки оси вращения неподвижны.
Траектории любой телесной точки β* лежит на пересечении 2-х сфер с радиусами lOBl и lABl, т.е. на окружности с центром на оси вращения.
Траектории лежат в неподвижных плоскостях, ортогональных оси ɭ, ток что вращательное движение – частный случай плоского. Если ввести неподвижную систему координат Охуz, совместив ось z с осью ɭ, то плоскость Oxy можно
![]()
принять за плоскость движения.
Вывод: вращательное движение одновременно и сферическое и плоское.
27.Закон движения абсолютно твердого тела. Дифференцирование линейных операторов. Оператор угловой скорости; формула Эйлера в операторной записи.
Закон движения материального тела –правило, задающее для каждой точки тела и каждого момента времени текущее положение точки.
Прямой способ задания движения тела:
В=Н(В*;t);
конфигурация
тела β зависит от t
как от параметра, а В* β-произвольная точка тела
β-произвольная точка тела
Если
тело β-абс. твердое, то В* Е*(т.е. это произвольная точка тела)
Е*(т.е. это произвольная точка тела)
Векторный
способ: задают 2 ф-ции времени
 =
= ;
; =
= (t)(операторная);
(t)(операторная);
Здесь
А- текущее положение полюса А* *,
а
*,
а -оператор
ориентации АТТ.
-оператор
ориентации АТТ.
Тогда
по основной ф-ие геометрии движения
 =
= *,
где
*,
где *=
*= ,
можно найти закон движения произвольной
телесной точки В*
,
можно найти закон движения произвольной
телесной точки В*
Если
лин. оператор
 :
х->у зависит от времениt,
как от параметра:
:
х->у зависит от времениt,
как от параметра:
 ,
то его производной поt
наз-ся предел
,
то его производной поt
наз-ся предел
 =
=
Пусть
сущ. t
оператор
 =
= мультипликативной производной (
умножения) поt
наз-ся лин. оператор:
мультипликативной производной (
умножения) поt
наз-ся лин. оператор:
 ,
т.к.
,
т.к. :-y->x,
то
:-y->x,
то
 :y->y,
т.е.
:y->y,
т.е.

Оператор
угловой скорости характеризует быстрому
изменению ориентации АТТ формула
 =
= принимает вид
принимает вид =
= ,
т.к.
,
т.к. -
- ,
получаем
,
получаем
(*) Это формула Эйлера( в операторной
записи)
Это формула Эйлера( в операторной
записи)
Вывод:
мгновенное движение АТТ задано, если
известны вектор и
оператор
и
оператор .
.
28.Теорема об антсимметричности оператора угловой скорости. Вектор угловой скорости; формула Эйлера в векторной записи. Траектории и скорости телесных точек при сфкрическом движении.
Теорема:
оператор угловой скорости антисимметричный:
 =-
=-
Док-во:
в силу ортогональности

 =
= ,
дифференцируем поt
,
дифференцируем поt
 +
+ =0
=0
Вычисляем
 =
= =
= =
= ,
,
Вектор
 ,
сопоставляемый антисимметричному
оператору
,
сопоставляемый антисимметричному
оператору по
формуле
по
формуле
 =[
=[ ]
называется вектором угловой скорости
АТТ.
]
называется вектором угловой скорости
АТТ.
Если
 -
един-ные векторы системы коорд.xyz,
то
-
един-ные векторы системы коорд.xyz,
то
 =
= +
+ +
+ ,
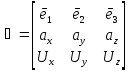
а матрица
,
а матрица =
=
Вектор
 изменения ориентации АТТ
изменения ориентации АТТ
Это свободный вектор, т.к. его компоненты выражаются только через направление cos и их производных, а от выбора полюса не зависит
 ,
это формула Эйлера в векторной записи,
была получена в 1765 году.
,
это формула Эйлера в векторной записи,
была получена в 1765 году.
Движение АТТ сферическое, если одна из телесных точек неподвижна, поскольку текущее положение О этой точки О* не изменяется с течением времени, то О можно принимать за
![]()
начало неподвижной системы координат.
Выберем
точку О* за полюс, тогда
 =
= *,
где
*,
где *=
*=
Вывод:
соотношения
 =
= (t)
определяет закон сферического движения
тела
(t)
определяет закон сферического движения
тела
Из услвия IОВI=const следует, что траектории телесных точек при сферическом движении лежат на концентрических сферах
При
сферическом движении
 принимает вид (*)
принимает вид (*)
 .
.
При сферическом движении АТТ:
-мгновенное движение в любой момент времени-мгновенное вращение, ось которого всегда проходит через точку О;
-распределение скоростей телесных точек задается формулой (*).
29.Плоское движение АТТ. Матрица направляющих косинусов при таком движении. Вывод соотношений для координат двух телесных точек при плоском движении.
Движение АТТ – плоское (или плоскопараллельное), если все телесные точки движутся в плоскостях, параллельных некоторой неподвижной плоскости (плоскость движется).
Траектории телесных точек при этом- плоские кривые.
Примем за плоскость движение Oxy ту из параллельных плоскостей, в которой движется полюс А*
Точки тела, движущегося в этой же плоскости, образуют плоскую фигуру.

Вывод: Изучение плоского движения АТТ сводится к изучению движения плоской фигуры.
Здесь Аx’, Ay’,Az’-текущее положение осей А*х*, А*у*, А*z* (ось Az’ сонаправлена оси Оz)
Угол ϕ-угол поворота тела, отсчитывается от направляющей оси Ох до оси Ax’ в положительную сторону.
Перейдем
у метрической записи основной формулы
геометрии движения: =
= *,
где
*,
где *=
*= .
.
Для
чего введем столбцы:
 =
= ,
, =
= ,
, =
=
Получаем
(*) =
= +
+
Сейчас
 =0
=0
Напр.
косинусов
 =cos(
=cos( =cos
ϕ
=cos
ϕ
 =cos(
=cos( =-sinϕ
=-sinϕ
 =cos(
=cos( =sinϕ
=sinϕ
 =cos(
=cos( =cosϕ
=cosϕ
 =cos(
=cos( =cos
0=1
=cos
0=1
Остальные cos=0(векторы ортогональны)
Г=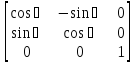 Вывод: соотношения
Вывод: соотношения определяют
закон плоского движения тела, при этом
координаты т. В в силу (*) можно найти по
формулам
определяют
закон плоского движения тела, при этом
координаты т. В в силу (*) можно найти по
формулам
(**)
Для
точек плоской фигуры

30. Вывод формул для компонент оператора и вектора угловой скорости при плоском движении. Получение соотношений для проекций скоростей двух телесных точек.
Для
оператора
 угловой
скорости АТТ имеем
угловой
скорости АТТ имеем =
=
В матричной форме
(*) =
= =
=
Матрица
Г при плоском движении Г=
Вычисляем
 =cos
=cos

 .
.
Поэтому
 =
=
У
матрицы
 3-я
строка нулевая, поэтому в силу (*)
3-я
строка нулевая, поэтому в силу (*) =0.
=0.
Т.к.
 на 1-й столбец
на 1-й столбец (т.е. на первую строку Г):
(т.е. на первую строку Г):
 (ϕ ̇cos
ϕ)
(ϕ ̇cos
ϕ) ϕ
ϕ -
- sinϕ
sinϕ (-sinϕ
)
(-sinϕ
)

 =0,
=0,

Ед.
для

Вывод:
угловая скорость АТТ в плоском движении
– вектор
 ,
где
,
где
Для
оператора угловой скорости:
 =
= ,
а в матричной записи
,
а в матричной записи =
=
Пусть
теперь
 скоростьj-ого
тела, а телесные точки А* и В* движутся
в плоскости движения Оxy.
Пусть
скоростьj-ого
тела, а телесные точки А* и В* движутся
в плоскости движения Оxy.
Пусть
 – угол, образуемый направленным отрезком
– угол, образуемый направленным отрезком с положительным
с положительным
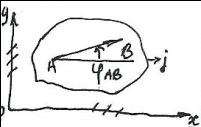
направлением оси Ох.
Т.к.
 ≡0,
≡0, ≡0,
то
≡0,
то =0
и
=0
и =0
=0
Переход
от А к В представим графом (1) А
Подставим
теперь в ф-лу Эйлера

В
матричной записи (2)
 =
= +
+
Здесь
 =
= ,
, =
= ,
, ,
, =
=
Переходя
к компонентной записи из (2) получаем

 ,
,
Эти формулы соответствуют графу (1).
Аналитический метод решения задач кинематики
Пример составного графа:
А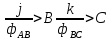
Распишем данный граф:
(1)
Соотношения (1) верны при следующем основном дополнении – скорости тех точек j-ого и k-ого тел, текущим положение которых служит т. В
Порядок решения типичных задач:
Выбрать кинематический граф, с которым связано не более 2-х неизвестных кинематических величин.
Составить кинематические соотношения для выбранного графа.
Учесть связи в концевых точках графа.
Решить полученные кинематические ур-я.
Если не все неизвестные найдены, вернуться к 1.
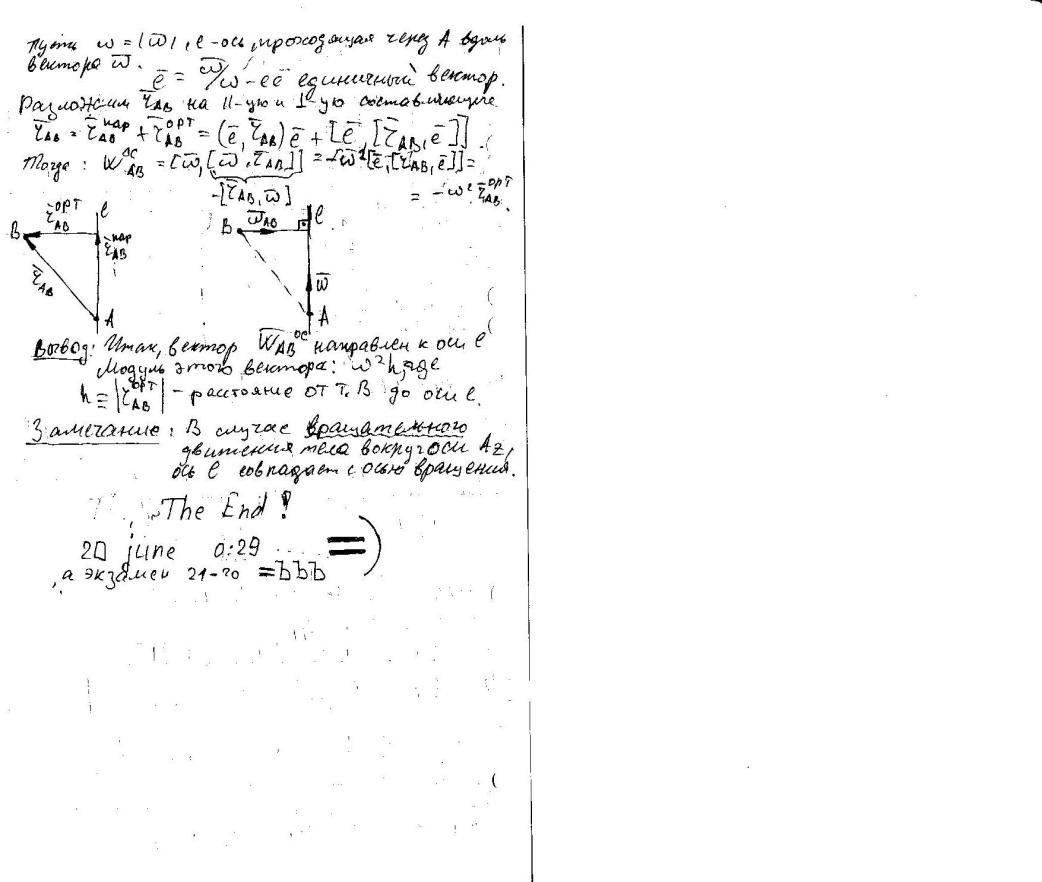
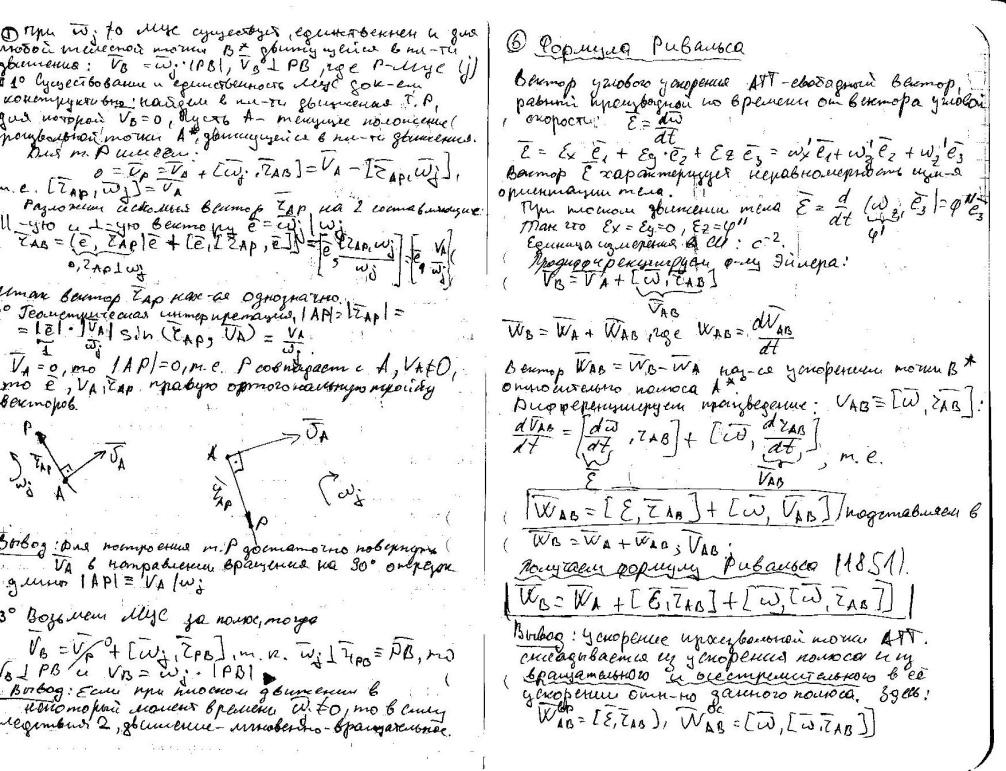
31. Решение задачи о разложении вектора на параллельную и ортогональную составляющие. Вычисление вектора угловой скорости по вектору относительной скорости при плоском движении.
Лемма:
формула (*)
 =(
=( ,
, )
) +[
+[ ,[
,[ ]]
дает разложение вектора
]]
дает разложение вектора на
2 составляющие:
на
2 составляющие:
![]()
параллельную
и ортогональную заданному ед. вектору

Док-во:
проекция вектора
 на направлении вектора
на направлении вектора (
( ,
, )
так, что
)
так, что =(
=( ,
, )
)
Применяем формулу «БАЦ» минус «ЦАП» для двойного векторного произведения
[ ,[
,[ ]]=
]]= ,
, -
- ,
, ,
получаем [
,
получаем [ ,[
,[ ]]=
]]= ,
, -
- ,
, =
= =
=
Найдем
угловую скорость тела
 ,
если известны вектор
,
если известны вектор ≡
≡ -
-
Запишем
ф-лу Эйлера в виде (**)
 =[
=[ ]
]
Разложим
вектор
 на 2 составляющие: параллельную и
ортогональную вектору
на 2 составляющие: параллельную и
ортогональную вектору =
=
 =
= [
[ ]]
в силу (**):
]]
в силу (**): .
.
Замечание:
поскольку
 =(
=( -
- +(
+( -
- ,
, =(
=( -
- +(
+( -
- ,
,
то
 -
- -
- (
( -
- (
( -
- ]
]
|
|
|
|