

Министерство
образования и науки Российской Федерации Федеральное
агентство по образованию Орский
Гуманитарно-Технологический Институт
(филиал)
Государственного
образовательного учреждения высшего
профессионального образования «Оренбургский
Государственный Университет»
кафедра
общепрофессиональных дисциплин
Расчет
клиноременной передачи Методические
указания
для студентов
специальностей
151001,
190601, 150501, 140211, 140604, 140106
г.Орск—2006г
ББК-34.44 УДК 621.81
Расчет
клиноременной передачи. Методические
указания для студентов специальностей
151001, 190601, 150501, 140211, 140604, 140106
Составители:
ст. преподаватель Г.С. Баширова,
преподаватель Д.В. Анненков, зав.каф.
общепрофессиональных дисциплин Е.В.
Баширова
Издательство Орского
Гуманитарно-Технологического Института,
2006
1.
Методика расчета клиноременной передачи 1.1.
Общие сведения Ременная
передача состоит из ведущего и ведомого
шкивов, закрепленных на валах, и ремня,
охватывающего шкивы с натяжением и
передающего окружное усилие с помощью
трения (рис.1). Рис.1.
Ременная передача
В зависимости
от формы поперечного сечения ремня
различают плоскоременные, круглоременные,
клиноременные и поликлиновые передачи.
Разновидностью ременной передачи
является зубчатая, передающая усилие
за счет зацепления ремня со шкивами.
Наиболее широкое
применение имеют клиноременные и
поликлиновые передачи.
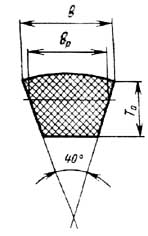
Клиновые ремни
выполняются прорезиненными и имеют
сечение трапециидальной формы (рис.2). Рис.2.
Основные параметры клинового ремня
Рис.3. Основные типы клиновых ремней
Клиновые ремни
производят нормального и узкого сечения.
Скорость
клиновых ремней нормального сечения
обычно не превышает V=25..30м/с.
Узкие ремни обладают в 1,5…2 раза большей
несущей способностью, могут работать
при более высоких скоростях и с большей
частотой перегибов.
Клиновые
ремни изготавливают в виде замкнутой
бесконечной ленты; стандартом ГОСТ
1284.1-81 предусмотрено семь сечений
клиновых ремней (рис.3): О; А; Б; В; Г; Д; Е,
перечисленных в порядке возрастания
размеров поперечного сечения.
Клиновые ремни
узкого сечения выпускают четырех типов:
УО; УА; УБ; УВ.
По номограмме
(рис.4) для заданных условий (Рпр
-номинальная передаваемая мощность и
nпр -частота вращения
ведущего вала привода) подбирают сечение
ремня с техническими данными (табл.1). Рис.4.
Номограмма для выбора сечения клинового
ремня
Таблица 1
Сечение
bр,
мм
b,
мм
T0,
мм
Площадь
сечения Ар,
мм2
Масса, кг/м
Lр,
мм
L=Lр–Lвн
dmin,
мм
О
8,5
10
6,0
47
0,06
400…2500
25
63
А
11,0
13
8,0
81
0,10
560…4000
33
90
Б
14,0
17
10,5
138
0,18
800…6300
40
125
В
19,0
22
13,5
230
0,30
1800…10000
59
200
Г
27,0
32
19,0
476
0,60
3150…14000
76
315
Д
32,0
38
23,5
692
0,90
4500…18000
95
500
Е
42,0
50
30,0
1172
1,52
6300…18000
120
800
Примечания:
1.
Lр
– расчетная длина ремня на уровне
нейтральной линии; Lвн
– внутренняя длина ремня по меньшему
основанию.
2.
Стандартный ряд длин Lр:
400, 450, 560, 630, 710, 800, 900, 1000, 1120, 1250, 1400, 1600,
1800, 2000, 2240, 280, 3150, 3550, 4000, 4500, 5000, 5600, 6300,
7100, 8000, 9000, 10000, 11200, 12500, 14000, 16000, 18000.
В
технически обоснованных случаях
допускаются промежуточные значения
Lр:
425, 475, 530, 600, 670, 750, 850, 950, 1060, 1180, 1320, 1500,
1700, 1900, 2120, 2360, 3000, 3350, 3750, 4250, 4750, 5300,
6000, 6700, 7500, 8500, 9500, 10600, 11800, 13200, 15000, 17000.
3.
Примеры условных обозначений: ремень
сечения В с Lр=2500мм
с кордной тканью в несущем слое для
работы в умеренном климате: Ремень
В–2500 Т ГОСТ 1284.1–80–ГОСТ 1284.3–80;
то же, с кордшнуром: Ремень В–2500 Ш ГОСТ
1284.1–80–ГОСТ 1284.3–80
1.2.2.1.
Для повышения ресурса работы передачи
рекомендуется устанавливать меньший
(ведущий) шкив с расчетным диаметром
d1>dmin
(на один – два номера больше). Стандартный
ряд диаметров: 63, 71, 80, 90, 100, 112, 125, 140, 160,
180, 200, 224, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710,
800, 900, 1000, 1250, 1400, 1600, 1800, 2000, 3150, 3550, 4000. 1.2.2.2.
Диаметр ведомого шкива
d2
= d1
* u
* (1
– ),
мм где
=0,01…0,02
– коэффициент упругого скольжения;
ременной передачи. u
– передаточное отношение ременной
передачи. Полученное
значение d2
округлить до ближайшего стандартного.
1.2.3. Уточнение
передаточного отношения
с учетом относительного
скольжения
Отклонение фактического
передаточного числа от заданного не
должно превышать 3%,
т.е.
1.2.4.
Межосевое расстояние
amin
= 0,55 *
(d1
+ d2)
+ T0,
мм
amax
=
d1
+
d2,
мм
где
T0
– высота
сечения ремня ( табл.1) Следует принять промежуточное
значение межосевого расстояния.
1.2.5.
Расчетная длина ремня
Принять
ближайшее стандартное значение Lp
(табл.1).
1.2.6.
Уточнение межосевого расстояния
1.2.6.
Условия эксплуатации
Для установки и
замены ремней следует предусмотреть
возможность уменьшения величины "а"
на 2%, а для компенсации отклонений и
удлинений во время эксплуатации –
возможность увеличения величины "а"
на 5,5%.
1.2.7.
Угол обхвата ремня малого шкива d1
1min=900.
в
эталонной передаче
P0
= (10-7
* nпр
* d12
– 7 *
10-5
* d12
+ 2,25 *
10-4
* nпр
+
+
1,1 * 10-3
* nпр
* lguф
* uф-1
+ 2,25 *
10-2
* d1
– 1,1) *
Kpp,
кВт где
Крр
– коэффициент для клиновых ремней
(табл.2);
Таблица 2
Значение
О
А
Б
В
Г
Д
Е
КРР
0,51
0,663
0,857
1,13
1,30
1,68
2,23
PР
= P0
* C
* CL
/ CР,
кВт где
С
– коэффициент расположения передачи
(табл.3);
CL
– коэффициент длины ремня (табл.4);
CР
– коэффициент динамической нагрузки
и режима работы привода (табл.5.)
Таблица 3
1,
0
180
170
160
150
140
130
120
100
90
С
1,0
0,98
0,95
0,92
0,89
0,86
0,82
0,73
0,68
Таблица 4
Lр,
мм
Сечение ремня
О
А
Б
В
Г
Д
Е
400 450 500 560 630 710 800 900 1000 1120 1250 1400 1600 1800 2000 2240 2500 2800 3150 3550 4000 4500 5000 5600 6300 7100 8000 9000 10000 12500 15000 18000
0,79 0,80 0,81 0.82 0,84 0,86 0,90 0,92 0,94 0,95 0,98 1,01 1,04 1,06 1,08 1,10 1,30 – – – – – – – – – – – – – – –
– – – 0,79 0,81 0,83 0,85 0,87 0,89 0,91 0,93 0,96 0,99 1,01 1,03 1,06 1,09 1,11 1,13 1,15 1,17 – – – – – – – – – – –
– – – – – – – 0,82 0,84 0,86 0,88 0,90 0,93 0,95 0,98 1,00 1,03 1,05 1,07 1,09 1,13 1,15 1,18 1,20 1,23 – – – – – – –
– – – – – – – – – – – – – 0,86 0,88 0,91 0,(3 0,95 0,97 0,99 1,02 1,04 1,07 1,09 1,12 1,15 1,18 1,21 1,23 – – –
– – – – – – – – – – – – – – – – – – 0,86 0,88 0,91 0,93 0,96 0,98 1,01 1,04 1,06 1,09 1,11 1,17 1,20 –
– – – – – – – – – – – – – – – – – – – – – – 0,92 0,95 0,97 1,00 1,02 1,05 1,07 1,13 1,17 1,20
– – – – – – – – – – – – – – – – – – – – – – – – 0,92 0,96 0,98 1,01 1,03 1,08 1,11 1,16
Таблица 5
Условия работы
Тип машин
Тип двига-еля
Значения
СР
при числе смен работы
1
2
3
Режим легкий.
Нагрузка спокойная. Кратковременная
нагрузка – до 120% от номинальной
Станки с непрерывным
процессом резания. Центробежные
насосы и компрессоры. Ленточные
конвейеры, сепараторы
I II
1,0 1,2
1,1 1,4
1,4 1,6
Режим средний.
Умеренные колебания. Кратковременная
нагрузка – до 150% от номинальной
Станки фрезерные,
поршневые компрессоры и насосы. Цепные
транспортеры, элеваторы. Дисковые
пилы. Пищевые машины
I II
1,1 1,3
1,2 1,5
1,5 1,7
Режим тяжелый.
Значительные колебания нагрузки.
Кратковременная нагрузка – до 200% от
номинальной
Станки строгальные,
долбежные, деревообрабатывающие.
Конвейеры винтовые, скребковые. Прессы
винтовые эксцентриковые с тяжелым
маховиком. Машины для брикетирования
кормов
I II
1,2 1,4
1,3 1,6
1,6 1,9
Режим тяжелый.
Ударная нагрузка. Кратковременная
нагрузка – до 300% от номинальной
Подъемники,
экскаваторы. Прессы винтовые с легким
маховиком. Ножницы, молоты, мельницы,
дробилки, лесопильные рамы
I II
1,3 1,5
1,5 1,7
1,7 2,0
Примечания:
1.
Тип двигателя I
– значения Ср
указаны для передач от электродвигателей
переменного тока общепромышленного
применения и от двигателей постоянного
тока шунтовых.
2.
Тип двигателя II
– значения Ср
указаны для передач от электродвигателей
переменного тока с повышенным пусковым
моментом от электродвигателей
постоянного тока сериесных.
Z'p
Pпр
/ PР Полученное
значение Z'p
округлить до целого Zp.
где
СZ
– коэффициент неравномерности нагружения
ремней (табл.6).
Таблица 6
Число
ремней Zр
1
2…3
4…6
>6
СZ
1
0,95
0,90
0,85
Z'p[Zp]
– округлить до целого значения. Примечание:
С увеличением числа ремней возрастают
затруднения в монтаже и эксплуатации
передачи. На практике часто ограничивают
ZР8.
Если по расчету получается большее
число ремней Zp>[Zp],
то следует увеличить диаметр ведущего
шкива d1
и длину ремня Lp
либо использовать следующие сечения.
где
[V]
– предельно допустимая скорость ремня
(табл.7)
Таблица 7
Сечение
О
А
Б
В
Г
Д
Е
Скорость
[V],
м/с
30
30
30
30
33
33
33
1.2.13.
Число пробегов ремня
где
[]=10сек-1
– допускаемое число пробегов ремня.
1.2.14.
Окружная сила
Ft
= Pпр
* 103
/ VP,
Н
1.2.15.Напряжение
в ведущей ветви ремня
где
0
– начальное напряжение в ветвях ремня,
МПа (табл.8);
Ар
– площадь сечения ремня, мм2
(табл.1).
1.2.16.
Напряжение в ремне от центробежных сил
v
= 1,2 *
10-3
* Vp2,
МПа
1.2.17.
Напряжение от изгиба u
на
ведущем шкиве
где
Е – модуль упругости, МПа (табл.8);
Т0
– высота сечения ремня, мм (табл.1).
1.2.18.
Максимальное напряжение в сечениях
ремня
max
=
1
+
V
+
u,
МПа
1.2.19.
Долговечность ремня
где
у=9МПа. Примечание:
установленный стандартом средний
ресурс ремней должен быть при легком
режиме работы не менее 5000ч, при среднем
режиме работы 2000ч, при тяжелом режиме
работы 500ч. В случае недостаточного
ресурса можно увеличить d1
на одну ступень из стандартного ряда.
1.2.20.
Напряжение в ремне от предварительного
натяжения
где
0*
– допускаемое напряжение в ремне от
предварительного натяжения (табл.8),
МПа;
В
случае если '0>0*,
то следует принять '0=0*.
Таблица 8
Сечение ремня
О
А
Б
В
Г
Д
Е
Напряжение
0,
МПа
1,15
1,25
1,30
0,90
0,85
0,75
0,65
Допускаемое
напряжение 0*,
МПа
1,5
1,5
1,5
1,5
1,25
1,25
1,25
Модуль упругости
Е, МПа
100
100
100
100
90
90
90
F0
=
2 *
'0
* AP
* Zp
* sin(/2);
Н
Fp
=
1,2 *
F0,
H
b'шк
= (Zp
– 1) *
е + 2 *
f,
мм где
Zp
– число ремней;
е,
f
– параметры шкива (табл.9);
b'шк
– округлить до целого bшк.
Таблица 9
Сечение ремня
О
А
Б
В
Г
Д
Е
e
12,0
15,0
19,0
25,5
37,0
41,5
58,0
f
8,0
10,0
12,5
17,0
24,0
29,0
38,0
Исходные данные: в кинематической схеме
привода клиноременная передача
расположена между электродвигателем
и редуктором. Номинальная передаваемая
мощность Рпр=5кВт, передаточное
отношение u=3. электродвигатель
переменного тока общепромышленного
применения, частота вращения (асинхронная)
nпр=960об/мин. Режим
работы средний, работа в две смены.
По номограмме
[1, с.1] для заданных условий (Рпр=5кВт
номинальная передаваемая мощность и
nпр=960об/мин частота
вращения ведущего вала привода) выбираем
сечение ремня [1, с.4]: Ремень сечения Б по ГОСТ
1284.1–80 – ГОСТ 1284.3–80:
Сечение
bр,
мм
b,
мм
T0,
мм
Площадь
сечения Ар,
мм2
Масса, кг/м
Расчетная
длина
Lр,
мм
L=Lр–Lвн
Минимальный
диаметр шкива
dmin,
мм
Б
14,0
17
10,5
138
0,18
800…6300
40
125
2.2.2.1.
Для повышения ресурса работы передачи
рекомендуется устанавливать меньший
(ведущий) шкив с расчетным диаметром
d1>dmin
(на один – два номера больше).
Принимаем
d1=140мм
[1, с.4]. 2.2.2.2.
Диаметр ведомого шкива
d2
= d1
* u
* (1
– ),
мм где =0,01…0,02
– коэффициент упругого скольжения. d2
= 140 * 3 * (1 – 0,02) = 411,6мм Принимаем
d2=400мм
[1, с.4].
2.2.3. Уточнение
передаточного отношения
с учетом относительного
скольжения
Отклонение фактического
передаточного числа от заданного не
должно превышать 3%,
т.е.
2.2.4.
Межосевое расстояние
amin
=
0,55 *
(d1
+
d2)
+ T0
= 0,55 *
(140
+
400) + 10,5 = 307,5мм
amax
=
d1
+
d2
=
140
+
400 = 540мм Принимаем промежуточное
значение межосевого расстояния а=450мм.
2.2.5.
Расчетная длина ремня
Принимаем
Lp=1800мм
[1, с.4]
2.2.6.
Уточнение межосевого расстояния
2.2.6.
Условия эксплуатации
Для
установки и замены ремней следует
предусмотреть возможность уменьшения
величины "а" на 2%, т.е. на
457,6*0,02=9,2мм,
а для компенсации отклонений и удлинений
во время эксплуатации – возможность
увеличения величины "а" на 5,5%, т.е.
на 457,6*0,055=25,2мм.
2.2.7.
Угол обхвата ремня малого шкива d1
2.2.8. Допускаемое
значение мощности на один ремень (один
клин)
в
эталонной передаче
P0
= (10-7
* nпр
* d12
– 7 *
10-5
* d12
+ 2,25 *
10-4
* nпр
+
+
1,1 * 10-3
* nпр
* lguф
* uф-1
+ 2,25 *
10-2
* d1
– 1,1) *
Kpp,
кВт где
Крр=0,857
– коэффициент для клиновых ремней [1,
с.6].
P0
=
(10-7
*
960
* 1402
–
7 *
10-5
*
1402
+
2,25 *
10-4
*
960
+
+1,1*10-3*
960*
lg2,92
* 2,92-1
+2,25
*
10-2*
140
–1,1)*
0,857=2,52
кВт
2.2.9.
Расчетное значение мощности на
один ремень (клин) в заданных условиях
PР
= P0
* C
* CL
/ CР,
кВт где
С=0,89
– коэффициент расположения передачи
[1, с.6];
CL=0,95
– коэффициент длины ремня [1, с.6];
CР=1,2
– коэффициент динамической нагрузки
и режима работы привода [1, с.7].
PР
= 2,52
* 0,89
* 0,95
/ 1,2=1,77кВт
2.2.10.
Предварительное число ремней
Z'p
Pпр
/ PР
= 5 /
1,77 = 2,81 Принимаем
Zp
= 3.
2.2.11. Уточнить необходимое число
ремней с учетом
неравномерности их нагружения
где
СZ=0,95
– коэффициент неравномерности
нагружения ремней [1, с.7].
Принимаем
Zp
= 3.
2.2.12. Скорость ремней
где
[V]=30м/с
– предельно допустимая скорость ремня
[1, с.8].
2.2.13.
Число пробегов ремня
где
[]=10сек-1
– допускаемое число пробегов ремня.
2.2.14.
Окружная сила
Ft
= Pпр
* 103
/ VP
= 5
* 103
/ 7,04 = 710,5Н
2.2.15.
Нагружение в ведущей ветви ремня
где
0=1,30МПа
– начальное напряжение в ветвях ремня
[1, с.9];
Ар=138
мм2
– площадь сечения ремня [1, с.4];
2.2.16.
Напряжение в ремне от центробежных сил
v
= 1,2 *
10-3
* Vp2
= 1,2 *
10-3
* 7,042
= 0,059МПа
2.2.17.
Напряжение от изгиба u
на
ведущем шкиве
где
Е=100МПа – модуль упругости [1, с.9];
Т0=10,5мм
– высота сечения ремня [1, с.4];
2.2.18.
Максимальное напряжение в сечениях
ремня
max
=
1
+
V
+
u
=
2,28
+
0,059
+
7,5 = 9,84МПа
2.2.19.
Долговечность ремня
где
у=9МПа;
Что
достаточно [1, с.8].
2.2.20.
Напряжение в ремне от предварительного
натяжения
где
0*=1,5МПа
– допускаемое напряжение в ремне от
предварительного натяжения [1, с.9];
F0
=
2 *'0
* AP
* Zp
* sin(1/2)
=2*1,43
*138
*3
*sin(147,460/2)
=1136,6Н
2.2.22.
Сила давления на валы передач
Fp
=
1,2 *
F0
=
1,2 *
1136,6
= 1364H
2.2.23.
Ширина
шкива
b'шк
= (Zp
– 1) *
е + 2 *
f,
мм где
е=19, f=12,5
– параметры шкива [1, с.9];
b'шк
= (3
– 1) *
19 + 2 *
12,5 = 63мм Принимаем
bшк=63мм.


1.2. Последовательность расчета клиноременной передачи
1.2.1. Выбор сечения ремня

Клиновые ремни по гост 1284.1–80 – гост 1284.3–80
1.2.2. Диаметры ведущего и ведомого шкивов
![]()
![]()
![]()

![]()
1.2.8. Допускаемое значение мощности на один ремень (один клин)
Значение коэффициента Крр
1.2.9. Расчетное значение мощности на один ремень (клин) в заданных условиях
Значение коэффициента с
Значение коэффициента сl
Значение коэффициента сp
1.2.10. Предварительное число ремней
1.2.11. Уточнить необходимое число ремней с учетом неравномерности их нагружения
![]()
Значение коэффициента сz
1.2.12. Скорость ремней
![]()
Значение предельно допустимой скорости ремня [V]
![]()

![]()


Значения 0 , 0*, е
1.2.21. Сила предварительного натяжения ремней
1.2.22. Сила давления на валы передач
1.2.23. Ширина шкива
Значения параметров шкива е , f
2.2. Пример расчета клиноременной передачи
1.2.1. Выбор сечения ремня
2.2.2. Диаметры ведущего и ведомого шкивов
![]()
![]()


![]() 1min=900.
1min=900.![]()
![]()
![]()
![]() .
.![]()
![]()
![]()
2.2.21. Сила предварительного натяжения ремней
2
15
3
14
4
13
5
12
6
11
7
10
8
9