

Структурное упрощение контура системы
Для упрощения структуры системы следует отметить контрольными точками упрощаемый участок системы. Затем следует выбрать пункт меню "Синтез | Упрощение структуры". Если в собранной схеме нет ошибок, то откроется окно "Упрощение структуры". В этом окне следует выбрать упрощаемый контур. При подтверждении откроется новое окно редактора, куда поместится результат упрощения.
Синтез структуры по передаточной функции
Пакет "Анализ систем" может синтезировать систему, заданную передаточной функцией, введенной с клавиатуры. Для этого лишь следует записать передаточную функцию W(s), в виде произвольной зависимости от оператора Лапласа s.
Для синтеза структуры по передаточной функции выберите пункт меню "Синтез | Синтез структуры по W(s)". Откроется окно "Синтез структуры", в котором следует ввести передаточную функцию системы.
При подтверждении пакет "Анализ систем" откроет новое окно редактора и попытается в нем синтезировать заданную Вами структуру.
Синтез регулятора
Пакет "Анализ систем" может синтезировать регулятор для заданного объекта управления. Регулятор находится по методу обратных задач динамики. При этом существуют интеллектуальные фильтры для выделения ПИ, ПИД, ПД+ПИД-регуляторов.
Перед синтезом регулятора следует собрать модель объекта управления. Затем контур объекта управления следует отметить контрольными точками.
Для синтеза регулятора выберите пункт меню "Синтез | Синтез регулятора". Если в собранной схеме нет ошибок, то откроется окно "Синтез регулятора". В этом окне следует выбрать контур объекта управления, для которого подбирается регулятор, а также следует ввести постоянную времени Tж – желаемую постоянную времени апериодического процесса, получаемого в результате синтеза.
Параметрическая оптимизация
Пакет "Анализ систем" позволяет произвести параметрическую оптимизацию системы. Другими словами, найти такие значения выбранных параметров системы, при которых переходный процесс в системе был бы наилучшим, с точки зрения одного из критериев качества.
Для того чтобы произвести параметрическую оптимизацию следует:
1. Отметить варьируемые параметры системы. Для этого следует выбрать параметры блока и отметить галочкой эти параметры.
2. Выбрать пункт меню "Синтез | Оптимизация". При этом откроется окно "Оптимизация", в котором следует выбрать диапазон изменения параметров, выставить точку ошибки в системе, а также выбрать критерий оптимизации.
Примечание:
Варьируемыми параметрами могут быть лишь параметры стандартных блоков (таких как интегратор, дифференциатор и т.п.). Параметры других звеньев не могут быть выбраны в качестве варьируемых.
Контрольный пример
Запускаем программный syan.exe.
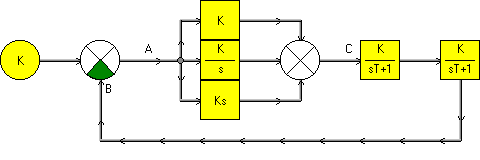
В появившемся окне набираем следующую структурную схему:

Выставляем параметры блоков. При этом блоку "нелинейность типа ограничение" выставим ограничения соответственно 2 и -2. Все остальные параметры оставим по умолчанию.
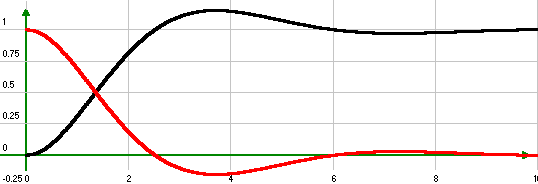
Построим переходный процесс в точках A и B за время 10 сек., при шаге 0.01 сек. Для этого выбираем пункт меню "Расчет | Переходной процесс".
Помечаем параметры регулятора (коэффициент усиления пропорционального звена и интегрального) галочкой "оптимиз". Для этого следует кликнуть по ним правой кнопкой мыши.
Затем входим в меню "Синтез | Оптимизация". Выбираем: точка ошибки — B, время 10 сек. Шаг 0.01 сек. Нажимаем "Дополнительно".
Выбираем критерий "Интегрально-квадратичный с первой производной". При этом вес ошибки 3, вес производной ошибки 2. Выбираем метод "Равномерный зонд" и нажимаем "по умолчанию". Нажимаем "Ок".
Жмем "Оптимизация". При этом параметры регулятора будут оптимально скорректированы для достижения минимума выбранного критерия качества. Строим снова переходной процесс.

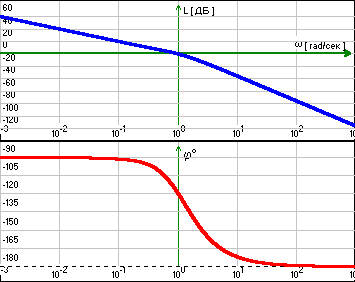
Выведем ЛАЧХ и ФЧХ полученного контура. Для этого выбираем пункт меню "Расчет | ЛАЧХ/ФЧХ". Контур B-A.
Построим годограф этого контура, при этом выставим автомасштаб вручную, соответственно -3, -8, 1, 1. Также разрешим построение ЭККУ. Получаем следующий график

Исследуем систему на устойчивость критерием В.М. Попова. Для этого выбираем пункт меню "Расчет | Критерий Попова". Контур B-A.

Получаем следующий график, а также информацию о том, что замкнутая система будет устойчивой.
Выведем передаточную функцию контура. Выбираем пункт меню "Расчет | Передаточная функция". Для контура B-A передаточная функция в выглядит так:
 или
или

Пробуем упростить схему. Для этого выбираем пункт меню "Синтез | Упрощение структуры". Выбираем контур C-A, нажимаем "Ok". В новом окне редактора появляется упрощенная структурная схема выбранного контура. Перекопируем ее в основную схему. Получаем следующую схему:

Уберем нелинейный элемент и подберем для этой схемы регулятор для объекта управления по методу обратных задач динамики. Для этого выбираем пункт меню "Синтез | Синтез регулятора". Контур C-A, постоянная времени 0.4.. Полученную в новом окне редактора структуру скопируем в основную схему. Получим:
Построим переходный процесс и убедимся, что переходный процесс апериодический с постоянной времени 0.4 сек.
Напишем на С++ текст программы, которая бы рассчитывала бы ПИД регулятор полученной схемы. Для этого выбираем пункт меню "Синтез | Генерация программы". Выбираем контур A-C, язык C++, шаг по времени 0.01 сек. Нажимаем "Генерация" и называем как-нибудь файл, в который будет записан результат программы на C++.
Сохраним схему, выбрав пункт меню "Файл | Cохранить". Появится запрос имени файла, если данный файл еще не был ни разу сохранен.
Для открытия файла, следует выбрать пункт меню "Файл | Открыть".
Для выхода из пакета нажмем крестик в углу окна пакета или выберем пункт меню "Файл | Выход".