

Программа для главного устройства (устройство 1, net-id 1) рис. 6.3:

Рис. 6.3 Програма отримання бітових значень через шину.
Налаштувати RN операнди наступним чином (рис. 6.4):

Бітовий вход RN 1 Бітовий вход RN 2
Рис. 6.4 Панелі налаштувань RN операндів
Счотний модуль С1 параметрується наступним чином (рис. 6.5):

Рис. 6.5 Панелі налаштування модуля С1
Щоб
обнулити функціональний блок в другій
строчці, виберіть функцію котушки RЕ
(скидання). Якщо

Рис.6.6 Повна схема з’єднання головного пристрою.
Щоб звертатися не до локального виходу Q1 головного пристрою, а до виходу приладу вводу/виводу (NET-ID 3), на вихід Q1 треба передати NET-ID 3(рис. 6.7):
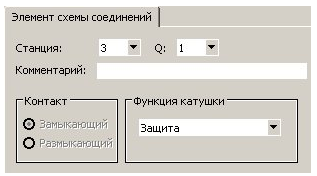
Рис. 6.7 Властивостей виходу 3Q1
Коли програма написана її залишається тільки загрузити на прилад (рис6.7):

Рис.6.7 Конфігурація системи.
Вище згадана конфігурація EASY-NET складається з трьох участків(1), двох з’єднувальних системних кабелів (2) і двох кінцевих опорів шини (3).Крім того необхідно з’єднати ПК з зображенням на передаючому рис. З ліва головним приладом. Для цього потрібний з’єднувальний кабель easy800 PC-CAB. Перед переходом в режим Зв’язок перевіряємо який інтерфейс вибраний і при необхідності вибрати інший.
Вміст звіту
1)Тема і мета роботи.
2)Робоча програма.
3)Відповіді на контрольні питання.
4)Висновок.
Контрольні питання
1) Для чого призначена EASY NET?
2) Що потрібно для роботи EASY NET?
3) Як налаштувати прилади на роботу EASY NET?
4) Можливі конфігурації системи?
5)Умови налаштувань системи?
Лабораторна робота №7
ТЕМА: Реалізація управління загрузки рольгангу 1 віртуального модулятору транспортера в програмному середовищі EASY- SOFT.
МЕТА: Реалізувати управління загрузки рольгангу 1 віртуального модулятору транспортера в програмному середовищі EASY- SOFT.
Хід роботи
Постановка задачі: на рольгангу 1 транспортної лінії розміщені чотири оптичні датчики наявності деталей F1, F2, F3, F4 (І1, І2, І3, І4), два індуктивних датчика IN1, IN2 (I5, I6), та кнопка аварійної зупинки Р1.
Схема підключення (рис.7.1):

Рис. 7.1. Коло управління реле EASY
На рис.7.1 представлена схема підключення EASY- SOFT для управління рольгангу 1 транспортера до якого підключено чотири датчики наявності деталей (І1, І2, І3, І4), два індуктивних датчика IN1, IN2 (I5, I6), двигун роботи рольгангу Q1, та кнопкою для аварійної зупинки Р1. В написанні програми використаємо пускач рольгангу 2 (К4) та пускач робота RB1 (К1).
Перелік операндів реле EASY:
Входи: І1 – І4 – оптичні датчики наявності деталей рольгангу 1;
І5 - оптичні датчики положення платформи рольгангу 2;
І6 - оптичний датчик наявності деталей рольгангу 2;
І10 - індуктивний датчики стику двох рольгангів;
І11 - індуктивний датчики положення платформи рольгангу 2;
Виходи: К1 – пускач робота RB1;
К2 – пускач рольгангу 1;
К4 – пускач рольгангу 2;
К5- пускач реверсу RB1.
Схема з’єднань (програма рис 7.2):
Деталь потрапляючи на оптичний датчики наявності деталей І1 вмикає робот котрий переносить деталь на рольганг 1. Коли деталь кладеться на рольганг то спрацьовує оптичний датчик І2 сигнал від якого запускає роботу транспортера і перемикає робот на реверс. При проходженні деталі через оптичний датчик І3, сигнал датчика запускає двигун рольгангової платформи на рух до рольгангу 2, як тільки увімкнеться рольганг 3, спрацює оптичний датчик І5 – початку руху, і вимикається робот RB1 (якщо подача організована на переміщення однієї деталі). При ситуації коли деталь надійшла до оптичного датчику І4, а платформа рольгангу 3 не встигла надійти рольганг 2 зупиняється. Коли рольганг 3 дійшов до кінцевого положення, спрацьовують індуктивний датчики кінцевого положення

Рис 7.2 Схема з’єднань
платформи рольгангу 2 - І11, і індуктивний датчики стику двох рольгангів - І10. І10 вмикає подачею свого сигналу рольганг 2, якщо той був вимкнений оптичним датчиком І4. При спрацюванні оптичного датчика наявності деталей І6 вимикається. Для аварійної зупинки рольгангу 1 використовується кнопка Р1 панелі управління пристрою EASY.