

4. Связь момента силы относительно оси с моментом силы относительно точки
Связь между моментами устанавливается как связь между вектором и его проекцией на соответствующую ось.
Проведем
через точку О, где задан момент силы
относительно точки
декартовы оси координат x,
y, z
. Момент силы относительно точки можно
представить в виде суммы трех векторов
![]() .
Эти векторы являются моментами силы
относительно осей x,
y,
z
соответственно.
.
Эти векторы являются моментами силы
относительно осей x,
y,
z
соответственно.
![]()
![]()
![]()
Момент силы относительно оси равен проекции на эту ось момента силы относительно любой точки на оси.
![]()
Формулы для моментов силы относительно осей координат
Если
сила
задана своими проекциями
![]() на оси координат и даны координаты
точки приложения этой силы, относительно
осей координат, то моменты силы
относительно осей координат
вычисляется следующим образом:
на оси координат и даны координаты
точки приложения этой силы, относительно
осей координат, то моменты силы
относительно осей координат
вычисляется следующим образом:
![]()
![]()
![]()
Лекция 4 Теоремы о сложении двух параллельных и двух антипараллельных сил
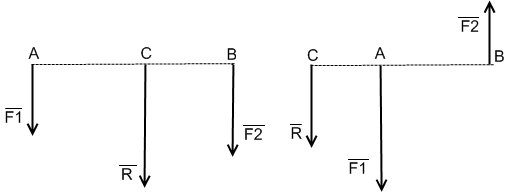
1. Две параллельные силы имеют параллельную им равнодействующую, модуль которой равен сумме модулей сил, а линия действия равнодействующей делит расстояние между точками приложения сил внутренним образом на части, обратно пропорциональные их модулям.
Дано:
![]()
![]()
![]()
![]() .
.
2. Две антипараллельные не равные по модулю силы силы имеют параллельную им равнодействующую, модуль которой равен разности модулей сил, а линия действия равнодействующей делит расстояние между точками приложения сил внешним образом на части, обратно пропорциональные их модулям.
Дано:
![]() (
(![]() )
)
![]()
![]() .
.
Пара сил. Момент пары сил
Применяем теорему для случая F1=F2, получим R=0. Такая система сил называется парой сил (ПС). При действии на тело ПС создает вращательный эффект, который характеризуется векторным и алгебраическим моментом.
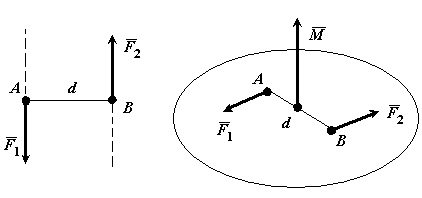
Парой сил называется система двух равных по модулю, антипараллельных сил, линии действия которых не совпадают.
1. Векторный момент ПС характеризует величину, направление и плоскость действия вращательного эффекта.
Векторным
моментом пары
сил
называется
вектор
![]() ,
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия сил пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки.
,
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия сил пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки.
Модуль
ПС :
![]() .
.
Плоскостью действия пары сил называется плоскость в которой расположены эти силы.
Плечом пары сил d называется кратчайшее расстояние между линиями действия сил пары.
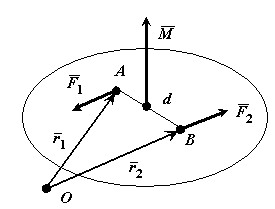
Теорема о сумме моментов пары сил. Сумма моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора этой точки и равна моменту этой пары сил.
![]()
Доказательство: Выберем произвольно точку О. Проведем из нее в точки А и В радиус-векторы .
![]() ,
, ![]()
![]()
Момент ПС не зависит от положения точки О, следовательно это свободный вектор. Он может быть приложен в любой точке тела.
2. Алгебраический момент ПС характеризует величину и направление вращательного эффекта.
Это есть взятое со знаком плюс или минус в зависимости от направления вращения произведение модуля любой силы на плечо ПС.
![]() .
.
-
Правило знаков:
Mo
Эквивалентность пар сил
Две пары сил, действующих на одно и то же твердое тело, эквивалентны, если они имеют одинаковые вектор-моменты.
Следствие: Не изменяя действие ПС на тело можно:
Переносить ПС в любое место плоскости действия.
Переносить ПС в любую параллельную плоскость.
3. Одновременно изменять плечо и силы, сохраняя при этом момент пары.
Теорема
о сложении пар сил.
Две пары
сил, действующих на одно и то же твердое
тело, и лежащие в пересекающихся
плоскостях, можно заменить одной
эквивалентной парой сил, момент которой
равен сумме моментов заданных пар сил.
![]()
Если на твердое тело действует несколько пар сил, как угодно расположенных в пространстве, то перенося все вектор-моменты ПС как свободные векторы в одну точку, получим пучок векторов (аналогия -ССС).
Последовательно применяя правило параллелограмма к каждым двум моментам пар сил, можно любое количество пар сил заменить одной эквивалентной парой сил, момент которой равен сумме моментов заданных пар сил.
![]() (*)
(*)
Аналитический способ определения момента эквивалентной пары
Момент эквивалентной ПС в декартовых координатах определяется следующим образом:
![]() .
.
Находим проекции вектора, спроецировав векторное равенство (*) на оси координат:
|
Модуль равнодействующей ПС и направляющие косинусы:
R
=![]() ,
,
![]() .
.
Необходимые и достаточные условия равновесия пар сил
1. Геометрическая форма
Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы момент эквивалентной пары сил равнялся нулю.
![]()
2. Аналитическая форма
M
=
![]() ,
если
,
если
![]() .
Следовательно, аналитические условия
равновесия имеют вид:
.
Следовательно, аналитические условия
равновесия имеют вид:
1)![]() , 2)
, 2)![]() , 3)
, 3)![]() .
.
Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций моментов пар сил на каждую из трех координатных осей была равна нулю.