

3. Приведение параметров механических частей электропривода к входному звену
Ставится задача получения формулы для приведенного момента инерции механической части электропривода, который содержит элементы, часть которых участвует во вращательном, а часть – в поступательном движениях. Сложность возникает тогда, когда необходимо записать уравнения либо для поступательного, либо для вращательного движения (т.е. нужно приводить момент инерций к массе или наоборот).
Рассмотрим переход от реальной схемы рис.2.2 к эквивалентной схеме рис.2.3. При этом приведенный и реальный ЭП должны иметь одинаковые момент сопротивления Мс, момент инерции J и угловую скорость вращения ротора электродвигателя.
Приведение расчетных параметров электропривода рассмотрим на основе приводимого ниже примера:
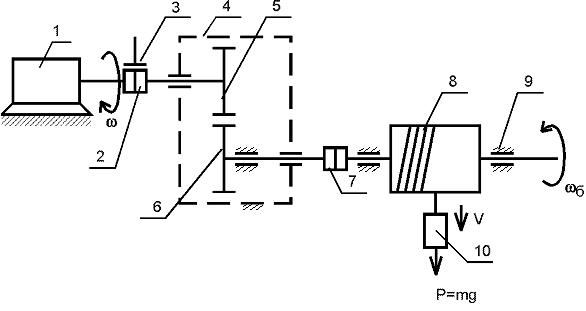
Рис. 2.2 Схема реального ЭП подъемного устройства
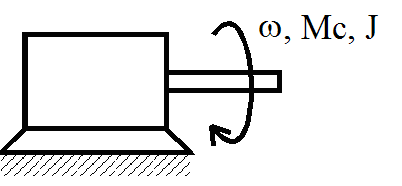
Рис. 2.3 Схема эквивалентного ЭП подъемного устройства
На рис.2.2 изображена реальная схема ЭП, на рис. 2.3 – эквивалентная схема. На рис. 2.2 приняты следующие обозначения:
1 – электродвигатель; 2 –муфта; 3 – тормозное устройство; 4 – корпус редуктора; 5,6 – зубчатые колеса; 7 – муфта; 8 – барабан; 9 – корпус устройства; 10 – груз; – угловая скорость вращения вала двигателя; б – угловая скорость вращения барабана (угловая скорость на выходном валу ЭП); V – линейная скорость перемещения груза; Р – вес груза.
Элементы 4,5,6 образуют редуктор, в целом же схема рис. 2.2 является схемой подъемного устройства.
На рис. 2.3 приняты обозначения:
J – приведенный момент инерции; МС – приведенный момент нагрузки.
При подаче напряжения питания на обмотку управления электродвигателя 1 начинается вращение его ротора, в силу чего приводится в движение барабан 8, который осуществляет подъём груза.
Приняты допущения, что все элементы кинематической схемы рис. 2.2 являются абсолютно недеформируемыми, но трос может изгибаться идеально. В качестве звена приведения обычно берут вал двигателя 1.
4. Приведение моментов инерции
Запишем выражение для кинетической энергии реальной и эквивалентной схем (рис. 2.2 и 2.3) и приравняем их друг к другу:
 ,
(2.9)
,
(2.9)
где Jд – момент инерции ротора электродвигателя 1; J1 – момент инерции вращающихся частей на первичном валу; J2 – момент инерции вращающихся частей на вторичном валу; m – масса груза.
Деля
формулу (2.9) на
 ,
получаем:
,
получаем:
 .
(2.10)
.
(2.10)
Для приведения параметров движения к входному звену введем передаточное отношение:
 ,
(2.11)
,
(2.11)
 , (2.12)
, (2.12)
где Rб – радиус барабана.
Выражение для приведенного радиуса инерции будет иметь вид:
 . (2.13)
. (2.13)
Подставим выражения (2.11)-(2.13) в соотношение (2.10)
 . (2.14)
. (2.14)
Формула (2.14) позволяет определить момент инерции с учетом масс подвижных частей сложной схемы (рис. 2.2) и перейти к приведенному моменту инерции эквивалентной схемы (рис. 2.3).
5. Приведение моментов сопротивления
Для приведения моментов сопротивления к входному звену воспользуемся формулой для мощности N для эквивалентной схемы (рис. 2.3) и для Nб на валу барабана исходной схемы (рис. 2.2):
 , (2.15)
, (2.15)
 , (2.16)
, (2.16)
где Rб – радиус барабана.
 ,
,
 ,
(2.17)
,
(2.17)
где
 – КПД общий, а также редуктора и барабана.
– КПД общий, а также редуктора и барабана.
Приравнивая правые части выражений (2.15) и (2.16), с учетом (2.17) получаем:
 ;
(2.18)
;
(2.18)
 ,
(2.19)
,
(2.19)
где
 – момент нагрузки на исполнительном
органе.
– момент нагрузки на исполнительном
органе.
В результате получаем следующее дифференциальное уравнение движения для ротора приведенного ЭП:
 ,
(2.20)
,
(2.20)
где приведенные: J –момент инерции, МС – момент сопротивления; МД – момент двигателя (описывается для каждого типа двигателя согласно его электрической и физической схемам).