

1 Динамические свойства системы импульсный усилитель—исполнительный двигатель.
3. Динамические свойства системы импульсный усилитель—исполнительный двигатель
О поведении ИД в динамическом режиме можно судить, как известно, по его реакции на различные виды сигнала управления, в том числе по отработке медленно изменяющихся синусоидальных сигналов, сигналов в виде ступенчатых функций и т.д. Под ступенчатым воздействием в импульсном следящем приводе следует понимать скачкообразное приложение последовательности импульсов определенной скважности к обмотке якоря ИД.
Пусть на ИД подается последовательность однополярных импульсов напряжения. Кривую изменения угловой скорости ИД в функции времени можно построить, если рассматривать последовательность импульсов как одиночные импульсы напряжения, прикладываемые через определенные промежутки времени Результирующая кривая Wс=f(t) является ломаной линией, состоящей из кусков экспонент, показывающих поведение ИД на каждом из участков (рис. 10.1).
Если на ИД подана последовательность низкочастотных импульсов (Тм<T), то кривая разгона ИД (рис. 10.1, а) будет существенно отличаться от экспоненты (пунктирная линия), характеризующей разгон ИД при приложении к нему ступенчатого напряжения постоянного тока, величина которого равна gU.
В импульсных следящих приводах с полупроводниковыми усилителями мощности Тм >> Т, На рис. 10.1, б показана кривая разгона ИД при Tм >> Т. Вид этой кривой Wс = f(t) свидетельствует о том, что разгон ИД при управлении импульсами напряжения высокой частоты практически не отличается от разгона ИД при приложении к обмотке якоря напряжения постоянного тока Uдв=gUп.
Частота коммутации
в импульсных следящих приводах по
энергетическим соображениям должна
выбираться такой, чтобы были малы
не только пульсации угловой скорости
ИД, но и пульсации тока в обмотке якоря,
т.е.
 .
Поэтому можно считать, что зависимость
изменения среднего значения тока в
обмотке якоря от времени при приложении
к обмотке якоря последовательности
импульсов определяется с достаточной
для практики степенью точности экспонентой
с постоянной времени Тя.
.
Поэтому можно считать, что зависимость
изменения среднего значения тока в
обмотке якоря от времени при приложении
к обмотке якоря последовательности
импульсов определяется с достаточной
для практики степенью точности экспонентой
с постоянной времени Тя.
Поскольку реакция на воздействие любого другого вида (гармонический сигнал, линейно возрастающий сигнал и др.) может быть представлена как реакция на сумму скачкообразных функций, можно ожидать, что поведение ИД в динамическом режиме при импульсном управлении практически будет такое же, как и при непрерывном управлении.
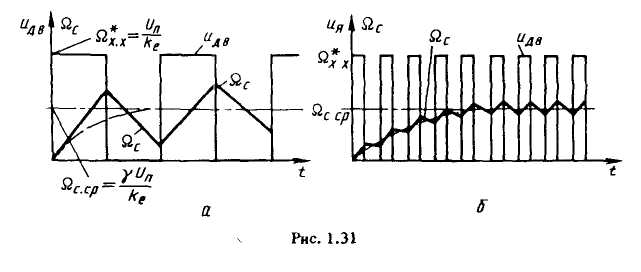
Рис. 10.1
Этот вывод следует также из теоремы В.А. Котельникова, на основании которой условия эквивалентности импульсной и непрерывной систем имеют вид
где wком= 2p /Т — угловая частота коммутации транзисторов усилителя мощности;
 - частота среза
следящего электропривода;
- частота среза
следящего электропривода;
Обычно частота среза w = 10 … 60 с-1. При Т = 0,001 с,
wком = 6280 с-1 имеем 0 < w < 6280 - 60 = 6220 с-1; 6280 > 120,
т.е. условия эквивалентности импульсной и непрерывной систем обычно соблюдаются.
На основании изложенного динамику импульсных следящих приводов можно исследовать линейными методами теории автоматического регулирования, считая, что передаточная функция системы ИУ-ИД имеет следующий вид:
 (10.1)
(10.1)
где
 - механическая постоянная времени
привода;
- механическая постоянная времени
привода;
 -
электромагнитная постоянная времени
цепи обмотки якоря ИД.
-
электромагнитная постоянная времени
цепи обмотки якоря ИД.