

5.4 Дискретизация сигнала, при условии его восстановления методом интерполяции
При этом методе полученные точки просто соединяются между собой отрезками прямых линий. Очевидно, что в этом случае плавные участки, близкие к прямым линиям, восстанавливаются с малыми погрешностями, а максимальная погрешность восстановления получается на участках с максимальной кривизной (рис. ).
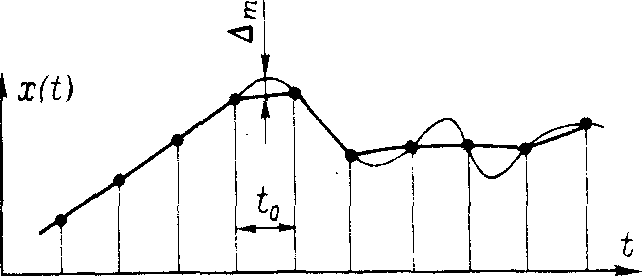
Известно, что любую кривую x(t) на некотором участке можно разложить по степеням t, т. е. описать многочленом. В простейшем случае, используя лишь первые члены разложения, участок кривой между отсчетами можно представить в виде параболы, тогда погрешность линейной интерполяции будет представлять собой разность между этой параболой и ее хордой, соединяющей смежные отсчеты. Как известно, парабола имеет наибольшее отклонение от хорды в середине интервала интерполяции t0 с абсолютным значением (m на рис.)
![]()
где
![]() - значение второй производной процесса
х(t)
т. е. оценка его кривизны. Отсюда
максимальное значение погрешности
восстановления наблюдается на участках
кривой с наибольшей кривизной (в области
максимумов и минимумов процесса предст.
на рис.).
- значение второй производной процесса
х(t)
т. е. оценка его кривизны. Отсюда
максимальное значение погрешности
восстановления наблюдается на участках
кривой с наибольшей кривизной (в области
максимумов и минимумов процесса предст.
на рис.).
Если
нас интересует не абсолютная погрешность
m,
а ее приведенное значение
![]() ,
где xk
— предел измерений, то можно определить
максимальный допустимый период
дискретизации tц
при котором погрешность восстановления
не будет превышать m:
,
где xk
— предел измерений, то можно определить
максимальный допустимый период
дискретизации tц
при котором погрешность восстановления
не будет превышать m:
![]()
Так
как любую сложную кривую можно разложить
на ряд гармонических составляющих, то
определим необходимый период дискретизации
для синусоидального процесса. При
x(t)=xksint
оценка
текущей кривизны
![]() ,
а ее максимальное значение
,
а ее максимальное значение
![]() .
Отсюда необходимый период дискретизации
для синусоидального процесса
.
Отсюда необходимый период дискретизации
для синусоидального процесса
![]() (3)
(3)
Соотношение (3) воспринимается более наглядно, если его помощью вычислить число точек п, приходящихся на каждый период Т синусоидального процесса:
![]() (4)
(4)
Это соотношение дает:
-
m
0,1
1
10
20
n
70
22
7
5
Таким образом, для восстановления синусоидального процесса с максимальной погрешностью 1 % при равномерной дискретизации необходимо иметь 22 отсчета на период процесса, но для представления с погрешностью 0,1% нужно не менее 70 отсчетов на каждый период, а для m=20% достаточно пяти отсчетов на период.
Исходя из соотношения (4), можно подсчитать минимальный период или максимальную частоту процесса, который может быть зарегистрирован с заданной максимальной погрешностью m. Данные о максимальных погрешностях при использовании некоторых приёмов и средств приведены в табл. и свидетельствуют о том, что без использования специальных средств могут быть зарегистрированы лишь очень медленные процессы (с периодом 0,2—2 с).
Метод регистрации |
t0 с |
Период или частота процесса при m , % равной |
||
0,1 |
1 |
10 |
||
Запись в журнал с показывающего прибора |
6 |
7 мин. |
2,2 мин. |
42 с |
Цифропечать |
0,5 |
35 с |
11 с |
3,5 с |
Перфоратор |
0,027 |
1,9 с |
0,6 с |
0,2 с |
АЦП с компьтером (условно) |
30 10-6 |
500 Гц |
1,5 кГц |
5 кГц |
Выражая m из выражения (3) или (4) получаем
![]() (5)
(5)
т. е. динамическая погрешность восстановления m возрастает е квадратом частоты восстанавливаемого процесса.
На практике чаще всего приходится измерять существенно несинусоидальные процессы, содержащие гармонические составляющие или высокочастотные составляющие шумов, помех или наводок. В этих случаях динамическая погрешность восстановления процесса по дискретным отсчетам резко возрастает, о чем исследователь должен всегда помнить.
Рассмотрим это свойство погрешности восстановления на конкретном примере. Так, в табл. указано, что при использовании АЦП с периодом дискретизации tц=30 мкс исследуемый процесс с частотой f1=500 Гц восстанавливается с m10,1%. Действительно, рассчитывая m1 по формуле (5), получаем
![]()
что часто можно считать достаточно высокой точностью восстановления. Однако если в кривой этого процесса содержится дополнительно еще 10-я гармоника с частотой f10=5000 Гц и амплитудой в 0,1 основной волны, она будет восстанавливаться с относительной погрешностью m10 , в 100 раз большей, чем m1, т. е. равной 10%. Правда, так как амплитуда этой гармоники в 10 раз меньше амплитуды основной волны, то приведенное значение этой погрешности составит лишь m10=1% • Тем не менее результирующая погрешность восстановления всего процесса будет в 10 раз (!) больше, чем погрешность восстановления m1=0,1% процесса, не содержащего этой высокочастотной составляющей.
Погрешность восстановления для основной волны и ее гармоник является систематической (она всегда отрицательна, см. рис. и приводит к уменьшению восстанавливаемой амплитуды кривой), однако если высокочастотная составляющая вызвана шумом или другими помехами и не синхронна с основной волной, то и погрешность восстановления оказывается случайной и наблюдается в виде случайного разброса отсчетов.
При ручной регистрации наблюдений подобный разброс данных будет сразу замечен экспериментатором и он примет соответствующее решение о ходе эксперимента. Рассмотренное явление особенно опасно при автоматическом вводе данных в компьютер и подчеркивает крайнюю важность метрологического анализа динамических погрешностей в этом случае.
Однако в связи с постоянным увеличением быстродействия компьютеров этот способ дискретизации и восстановления становится очень привлекательным.