

10.2 Оптимизация параметров измерительной системы второго порядка из условия минимума длительности переходного процесса.
Одним из важных критериев динамического качества является длительность переходного процесса, определяемая как время, начиная с которого кривая переходного процесса не выходит за границы допустимой динамической погрешности.
Обозначим относительное значение допустимой погрешности через
![]()
где доп – абсолютное значение допустимой погрешности.
При расчетах обычно допускают = 0,05:-0,1. В области 0 < < 1 существует оптимальное значение , при котором длительность переходного процесса при выбранном значении 0 будет наименьшей.
Представим уравнение (25) в безразмерной форме:
![]() (32)
(32)
График, построенный по уравнению (32) для трех близких значений , показывает, что минимум безразмерной длительности переходного процесса будет при таком значении =1, при котором максимум функции (32) после первого перехода через установившееся значения совпадает с верхней границей допустимой динамической ошибки 1+ (кривая 1). Этой кривой соответствует длительность процесса 1, при которой кривая 1 входит в зону допуска в точке А.
Допустим , что 2 > 1 . Тогда период колебаний увеличится и переходный процесс будет описываться кривой 2 , расположенной правее кривой 1 и входящей в зону 1 в точке В, для которой 2>1. Если же 3<1 (кривая 3), то период колебаний уменьшится, но увеличится величина перехода через установившееся значение, из-за чего максимальное отклонение кривой 3 выйдет за пределы верхней границы допуска +.
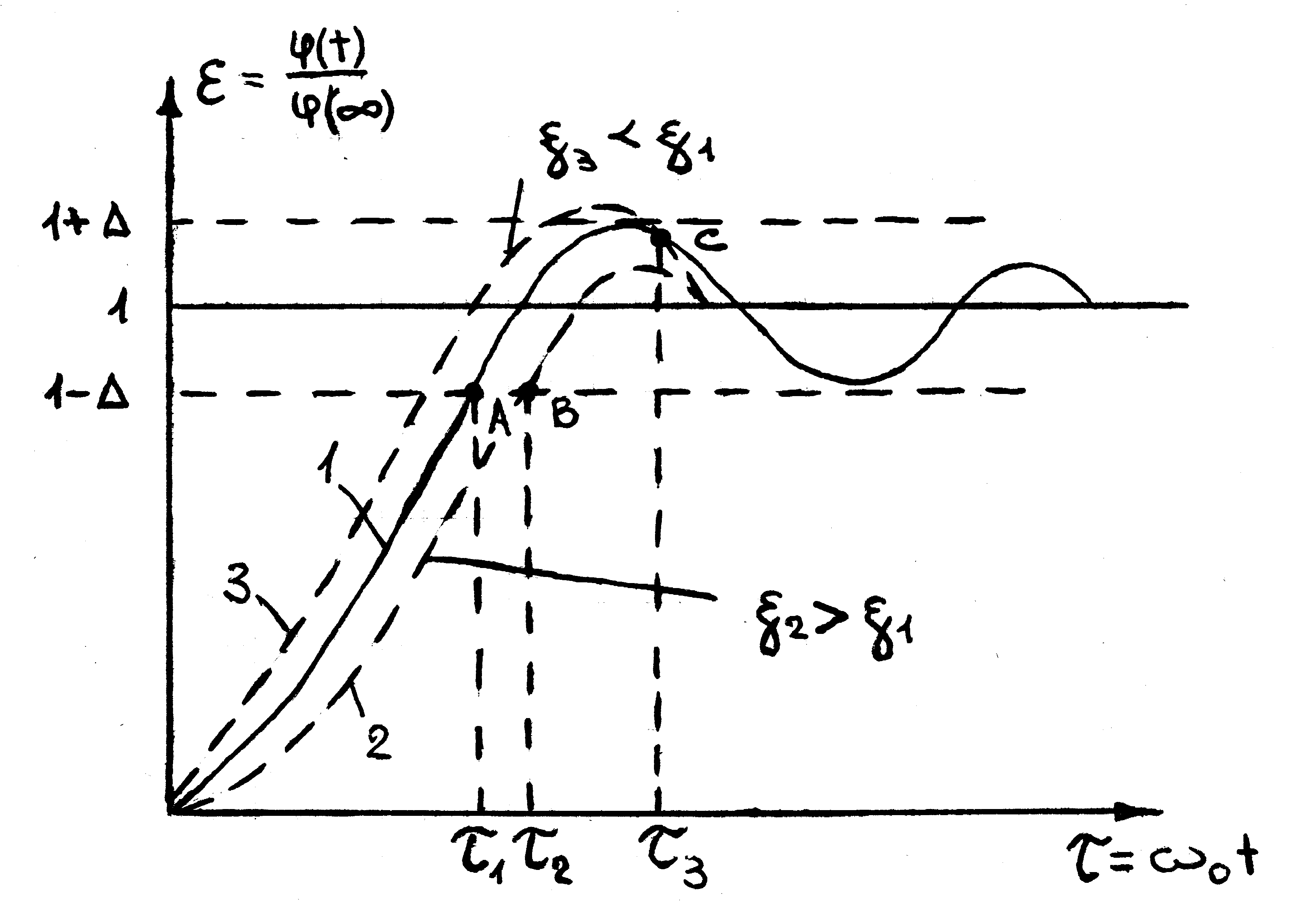
Рис К расчёту оптимальной степени успокоения по критерию минимума длительности переходного процесса
Длительность 3 процесса будет определяться вторым пересечением кривой 3 с верхней границей зоны допусков в точке С (т.е в зону допуска кривая войдет в конце первого полупериода). Следовательно: 3>1.
Таким образом, задача отыскания оптимального значения сводится к определению такого его значения, при котором первый максимум функции равен 1+. Выражение для оптимального значения можно найти, приравнивая в формуле (28) =.:
![]()
откуда оптимальная степень успокоения:
 (33)
(33)
Из последней формулы следует, что величина опт зависит от величины допуска .
Подставляя (33) в (32) и приравнивая =1- получим уравнение, однозначно определяющее минимальную безразмерную длительность переходного процесса:
![]() ,
,
это уравнение не имеет явного решения относительно nn , но может быть решено численно. Его численные решения, т.е. зависимость (опт, пп) приведена в таблице:
|
0 |
0,025 |
0,05 |
0,1 |
0,25 |
опт |
1,0 |
0,76 |
0,69 |
0,59 |
0,404 |
пп |
|
2,83 |
2,6 |
2,32 |
1,95 |
Действительная длительность процесса равна найденному из таблицы значению безразмерной длительности пп деленному на собственную частоту недемпфированных колебаний:
![]() (34)
(34)
Из формулы (34) следует, что
длительность переходного процесса
теоретически можно неограниченно
уменьшать путем увеличения 0
, однако на практике возможности
увеличения 0
ограничены. Увеличение
![]() в случае с маятниковым акселерометром
возможно за счет увеличения С
и уменьшения J.
Если выбран тип чувствительного элемента
и определены его размеры, исходя из
получения максимального вращающего
момента Мmax
, превышающего в нужное число раз вредные
моменты, то при заданном максимальном
угле max
поворота подвижной системы, жесткость
С
определяется из условия равновесия
системы в статическом режиме
в случае с маятниковым акселерометром
возможно за счет увеличения С
и уменьшения J.
Если выбран тип чувствительного элемента
и определены его размеры, исходя из
получения максимального вращающего
момента Мmax
, превышающего в нужное число раз вредные
моменты, то при заданном максимальном
угле max
поворота подвижной системы, жесткость
С
определяется из условия равновесия
системы в статическом режиме
![]() .
Что касается момента инерции J,
то он складывается из двух составляющих:
.
Что касается момента инерции J,
то он складывается из двух составляющих:
J=Jчэ + Jпр ,
где Jчэ – момент инерции подвижной части чувствительного элемента; Jпр –приведенный момент инерции масс подсоединенных к подвижной части, т.е. передаточного механизма, стрелки якоря и т. д.
При выбранном типе и размерах чувствительного элемента величины Jчэ и Мmax оказываются взаимосвязанными. Уменьшение Jчэ приведет к уменьшению Mmax.. Остается возможность уменьшения Jпр за счет уменьшения масс механизмов подсоединенных к подвижной части. Но здесь также существует предел. Таким образом, в каждой конструкции существует практический максимум собственной частоты
![]() ,
,
следовательно, наименьшая практически достижимая длительность переходного процесса
![]() .
.
После того как выбраны С, J, 0 и опт нетрудно найти оптимальный коэффициент демпфирования:
![]()