

В случае встречно-параллельного соединения звеньев:
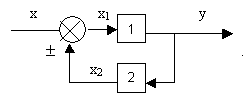
Рис. . Встречно-параллельное соединение звеньев
Если характеристики звеньев 1, 2 и уравнение связи имеют вид
y = f1 (x1); x2 = f2 (y); x1 = x x2 (21)
то характеристика устройства, состоящего из двух встречно-параллельных звеньев, получается из уравнений (21) в неявном виде:
y = f1 [x f2 (y)].
Здесь знак “+” отвечает положительной обратной связи, а знак “-” отрицательной.
Чувствительность устройства:
![]() ,
,
откуда
![]() ,
здесь знак “+” соответствует отрицательной
обратной связи, знак ”-” положительной.
,
здесь знак “+” соответствует отрицательной
обратной связи, знак ”-” положительной.
Рассмотрим графическое построение статической характеристики устройства, состоящего из двух встречно-параллельных звеньев с отрицательной обратной связью.
В прямоугольной системе координат строят характеристику звена 1, это кривая I. В той же системе координат строят характеристику II, звена 2. Затем ось ординат делят на произвольные участки 1, 2, 3, 4.
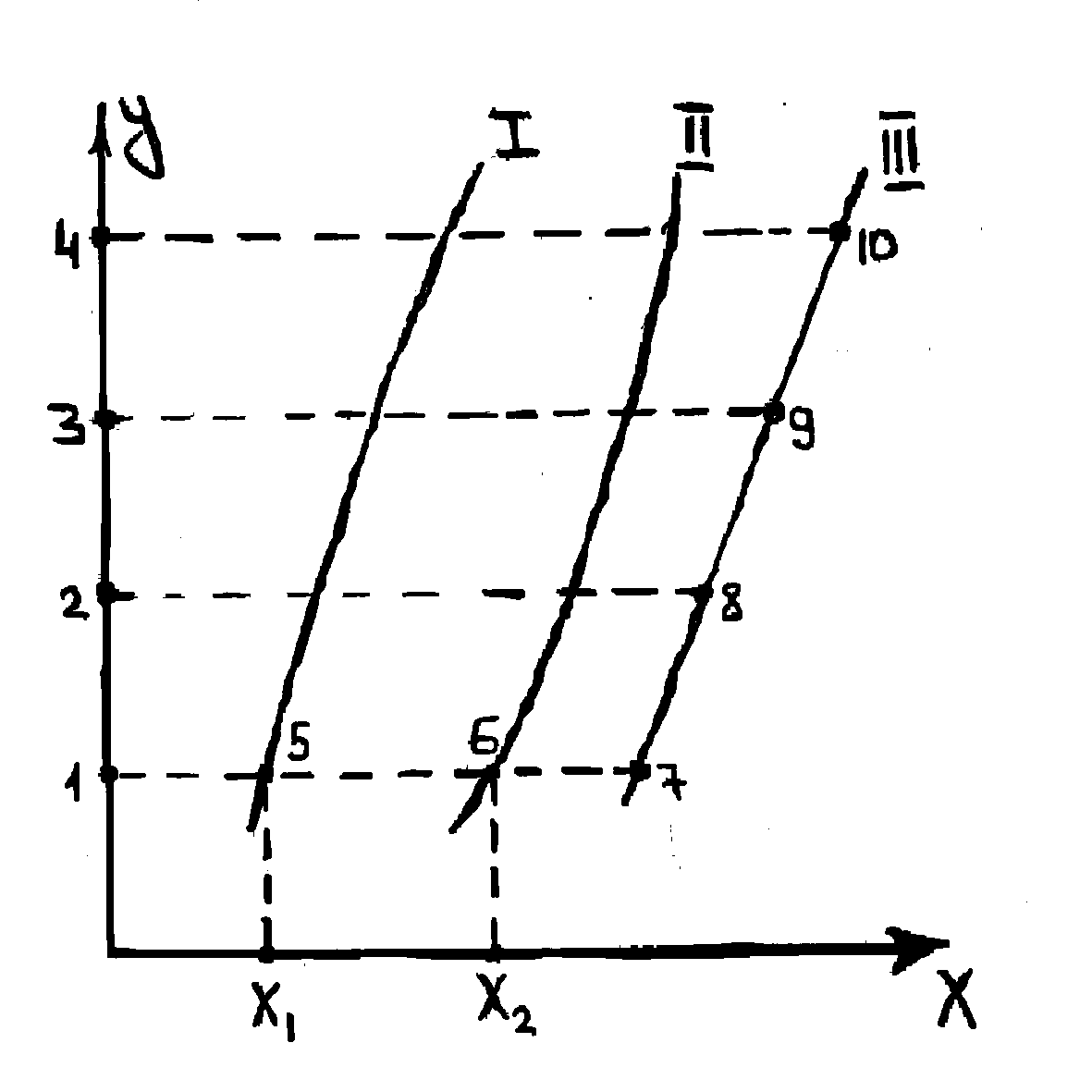
Рис. . Графический способ определения статической характеристики прибора, при встречно–параллельном соединении звеньев
Через точку 1 проводят прямую, параллельную оси абсцисс; точки 5 и 6 пересечения этой прямой с кривыми I и II имеют абсциссы х1 и х2, на той же прямой находят точку 7 с абсциссой х3 = х1 + х2. Повторяя аналогичное построение для точек 2, 3, 4 получаем точки 8, 9, 10.
Плавная кривая, проведенная через точки 7, 8, 9, 10 дает характеристику замкнутой системы с отрицательной обратной связью (кривая III). Тангенс угла наклона касательной к кривой I в любой точке, равен чувствительности звена 1 с учетом масштабов графика.
В случае компенсационного метода измерений S1 = и кривая I превращается в прямую, совпадающую с осью ординат и описываемую уравнением х1 = 0. В этом случае х=х1 и характеристика компенсационного устройства совпадает с характеристикой звена 2.
При положительной обратной связи для построения результирующей кривой III откладывается разность х3 = х1 – х2.
8.2. Динамические характеристики приборов и датчиков.
У прибора или датчика со статической характеристикой у=SX при неустановившемся режиме измерения возникает динамическая погрешность у(t)=у(t)-Sx(t), где х(t) – закон изменения входного сигнала (внешнее воздействие); у(t) – закон изменения выходного сигнала (реакция прибора на внешнее воздействие).
Вид внешнего воздействия х(t) в реальных условиях эксплуатации приборов и датчиков определяется характером протекания контролируемого физического процесса. Реакция прибора на внешнее возмущение может быть определена по его динамическим характеристикам. Динамические качества системы оценивают по переходному процессу или по частотным характеристикам.
Если в качестве динамической характеристики рассматривать дифференциальное уравнение, то реакция прибора на возмущения может быть определена путем решения уравнения. Уравнение может быть решено путем нахождения корней характеристического уравнения или путем преобразования Лапласа. После выполнения преобразования Лапласа дифференциальное уравнение может быть преобразовано в передаточную функцию.
Как известно в общем случае дифференциальное уравнение имеет вид:
f1 [Y (n), Y (n-1),…, Y] = f2 [x (m), x (m-1),…,x];
где
![]() ;
;
![]() .
.
Если это уравнение линейное или линеаризуемое, то оно приобретает вид:
a0Y(n) + a1Y(n-1) +…+ anY = b0 X(m) + b1X(m-1) +…+bmX ,
откуда определяется передаточная функция:
 ,
,
где х(р) и Y(р) – изображения Лапласа для х и у при нулевых начальных условиях, р – оператор преобразования Лапласа.
При составлении дифференциального уравнения часто возникают трудности в связи с тем, что это уравнение, описывающее определенный физический процесс, может быть составлено с различной степенью приближения. Часто, например, возникает вопрос, следует ли учитывать малые постоянные времени, или ими можно пренебречь. Решение приходится принимать в каждом конкретном случае в зависимости от численных значений параметров системы и с учетом динамической устойчивости системы.
Составлению и решению дифференциальных уравнений посвящено достаточное количество литературы. В связи с ограниченностью времени курса этот вопрос оставляем на самостоятельную проработку. Можно посоветовать книги Е.П. Попова «Теория линейных систем автоматического регулирования и управления» -М. Наука 1989 г., Д.А. Браславский, С.С. Логунов, Д.С. Пельпор «Авиационные приборы и автоматы» -М. Машиностроение 1978г.. Примеры составления уравнений типовых звеньев можно посмотреть в книге Д.А. Браславский «Приборы и датчики летательных аппаратов» -М. Машиностроение 1970г.