

В случае последовательного соединения звеньев:

Рис. . Последовательное соединение звеньев
Если характеристики звеньев 1, 2, …, n выражены соответственно уравнениями (16)
![]() ,
(16)
,
(16)
то результирующая характеристика прибора определяется совместным решением системы уравнений:
у = f n {f n-1 … f 2[f 1(x)]},
чувствительность прибора:
![]()
Для определения чувствительности
последовательного соединения, разделим
и умножим производную
![]() на dy1,
dy2,
dyn-1,
тогда
на dy1,
dy2,
dyn-1,
тогда
![]() .
.
Имея в виду, что
![]()
получим окончательно выражение для чувствительности (17)
S = S1S 2 …S n. (17)
Характеристику прибора с тремя последовательно соединенными звеньями можно определить следующими графическими построениями: в первой четверти прямоугольной системе координат строят характеристику первого звена y1= f1(x); во второй четверти строят характеристику второго звена y2= f2(y1), причем величину у1, для второго звена откладывают по той же оси ординат и в том же масштабе, что и величину у1, для первого звена. Аналогично в третьей четверти для у3= f3(y2). Затем делят ось на ряд участков произвольной длины, например 4 и из точки 1 восстанавливают перпендикуляр до пересечения с кривой y1= f1(x) в точке 5. Через точку 5 проводят горизонталь до пересечения с кривой y2= f2(y1) в точке 6, затем проводят вертикаль до пересечения с точкой 7 и снова горизонталь до пересечения с перпендикуляром от точки 1, и получают точку 8. Повторяя такое же построение для точек 2, 3, 4 строят кривую у = f(х). Если структурная схема содержит более трех звеньев, то графическое построение ведется в несколько приемов, сначала на одном графике определяем результирующую характеристику первых трех звеньев, затем рассматривая эти три звена как единое целое повторяют аналогичное построение на другом графике.
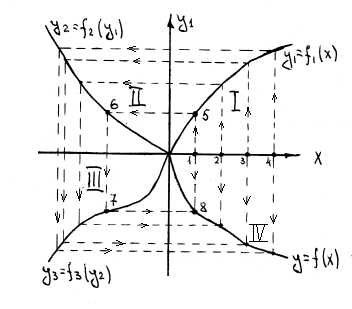
Рис. . Графический способ определения статической характеристики прибора, при последовательном соединении звеньев
В том случае, если число звеньев два, то их характеристики строятся в первой и второй четверти, затем проекция суммарной характеристики двух звеньев на ось абсцисс, переносится на ось ординат, после чего строится суммарная кривая аналогично предыдущему случаю (Рис. ). В том случая, если число звеньев более трёх, то строится суммарная кривая для трёх звеньев, которая переносится на следующий график, далее добавляется характеристика следующих звеньев и строится суммарная характеристика.
x
y1=f1(x)
y2=f2(x)
y=f(x)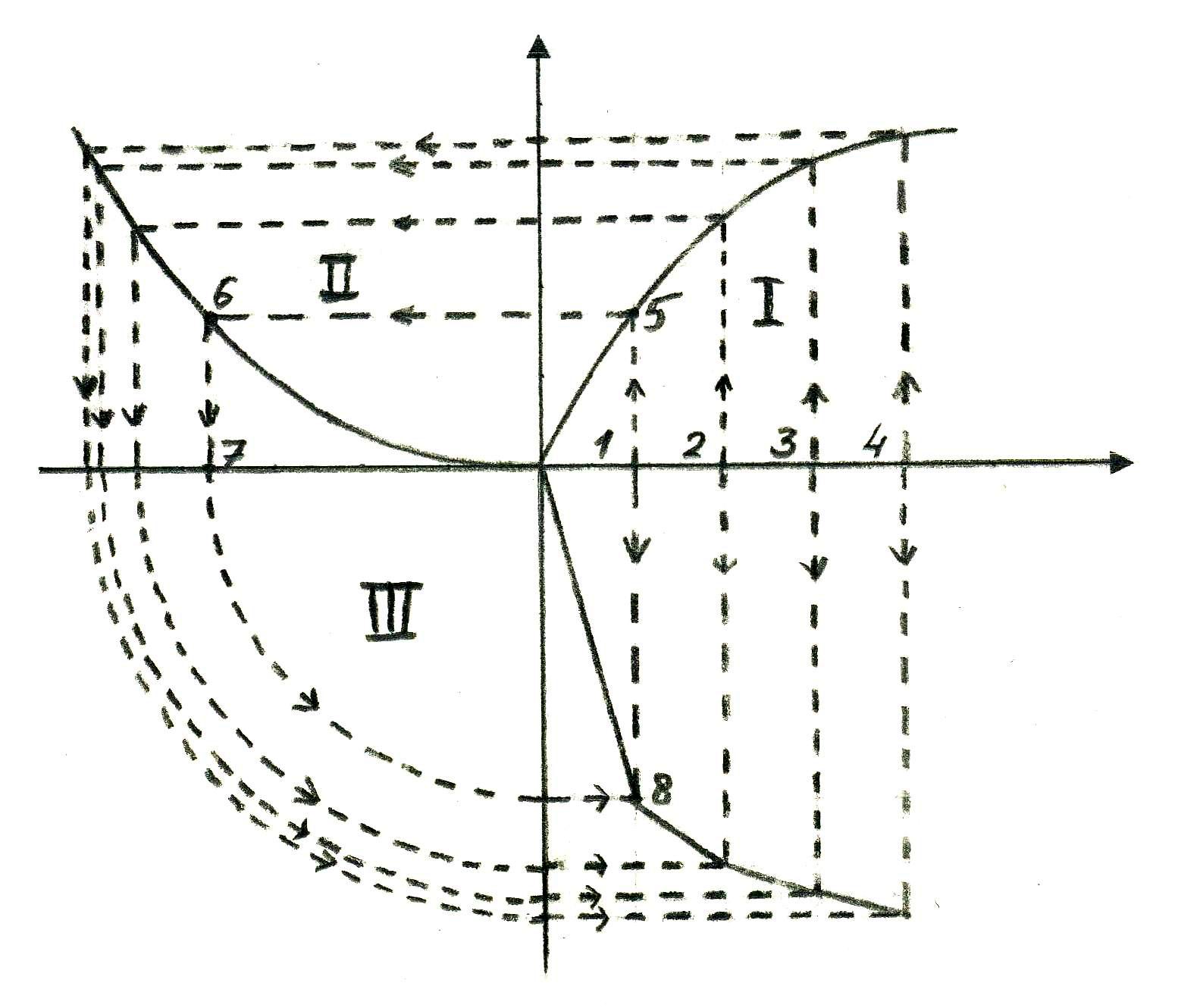
В случае параллельного соединения звеньев:

Рис. . Параллельное соединение звеньев
Если характеристика звеньев 1, 2, …, n выражены соответственно уравнениями
![]() (18)
(18)
а уравнение связи
у = у1 + у2 +…+ уn , (19)
то статическая характеристика системы получается подстановкой уравнения (18) в уравнение (19).
y = f1(x) + f2(x) +…+ fn(x) (20)
Для определения чувствительности продифференцируем уравнение (20) по входной величине х:

Графический метод построения статической характеристики прибора, состоящего из трех параллельных звеньев, состоит в следующем:
В прямоугольной системе координат строят характеристики каждого из звеньев (кривые I, II, III).
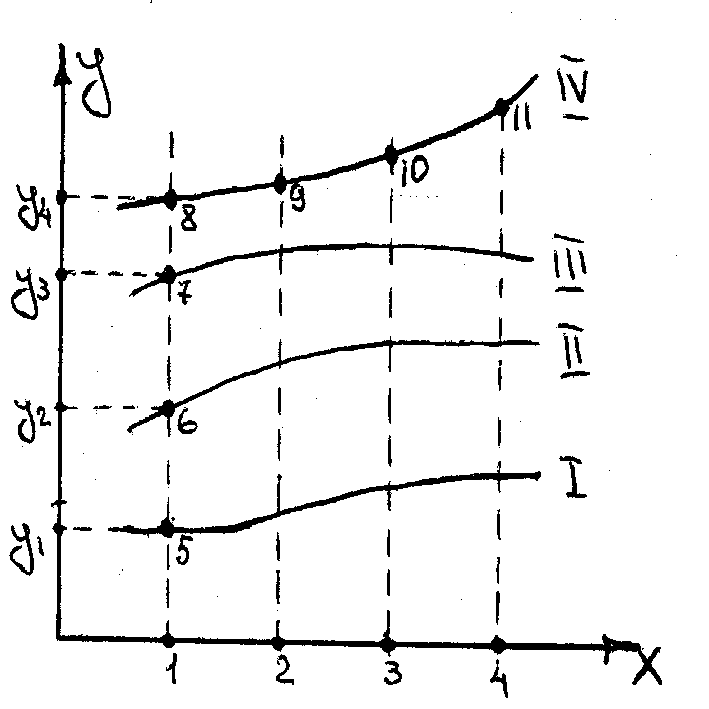
Рис. . Графический способ определения статической характеристики прибора, при параллельном соединении звеньев
Затем ось абсцисс делят на произвольные участки (1, 2, 3, 4). Через точку 1 проводят прямую, параллельную оси ординат. Точки 5, 6, 7 пересечения этой прямой с кривыми I, II, III имеют ординаты у1, у2, у3. Затем на той же прямой отмечают точку 8 с ординатой y4=y1+y2+y3. Повторяя аналогичное построение для точек 2, 3, 4 получают точки 9, 10, 11. Плавная кривая IV, проведенная через точки 8, 9, 10, 11 дает искомую характеристику системы с параллельными звеньями.