

Перехід в іншу систему координат
Ми розглянули перетворення геометричних об'єктів, заданих у певній декартовій системі координат. Але в багатьох випадках зручно розглядати ті ж об'єкти в іншій системі координат, оскільки їхній опис може стати більше простим. Найпростіший приклад - завдання координат паралелепіпеда: простіше всього це зробити в системі координат, сполученої з однієї з його вершин з осями, спрямованими уздовж ребер. У зв'язку із цим зупинимося на питанні, як зміняться координати крапки при переході від однієї декартової системи координат до іншої.
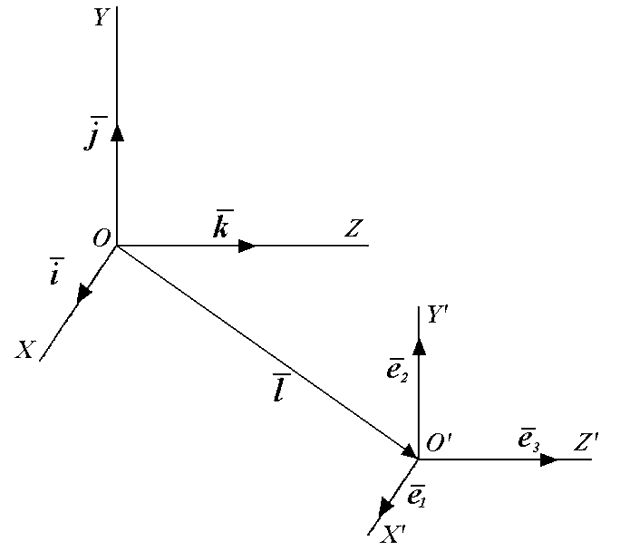
Рис. 4.9. Дві системи координат у просторі
Нехай
одиничні орти першої системи координат
позначаються
,
а осі координат -
![]() .
Уведемо ще одну систему координат,
одиничні орти якої позначимо
.
Уведемо ще одну систему координат,
одиничні орти якої позначимо
![]() ,
а осі координат -
,
а осі координат -
![]() .
Ця система має свій початок координат
і свої напрямки осей. Уважаємо, що в обох
системах координат орти утворять праву
трійку (мал. 4.9).
.
Ця система має свій початок координат
і свої напрямки осей. Уважаємо, що в обох
системах координат орти утворять праву
трійку (мал. 4.9).
Спочатку
розглянемо ситуацію, коли крапка
![]() збігається
із крапкою
збігається
із крапкою
![]() .
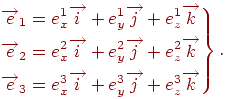
Вектори
можна
задати в першій системі координат,
розклавши їх по векторах
:
.
Вектори
можна
задати в першій системі координат,
розклавши їх по векторах
:
Якщо в
першій системі крапка
![]() має
координати
,
а в другій системі -
має
координати
,
а в другій системі -
![]() ,
те, мабуть,
,
те, мабуть,
![]()
Множачи скалярно це співвідношення на вектори , одержимо зв'язок між значеннями координат у різних системах:
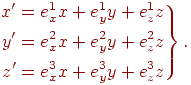
Ці співвідношення можна записати в матричному виді
|
(4.11) |
або у векторному записі
![]()
Припустимо, що друга система координат отримана з першої шляхом повороту на кут щодо осі . Тоді
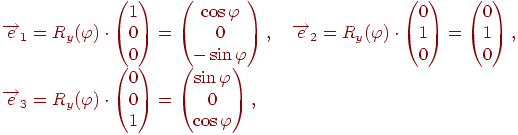
отже

Таким чином, при поворотах системи координат нові координати крапок виходять шляхом множення матриці повороту на протилежний кут на вектор вихідних координат.
Якщо нова система координат отримана зі старої шляхом зрушення на вектор , то очевидно, що нові координати крапки задаються формулами
![]()
Тепер можна розглянути композицію двох перетворень системи координат - переносу й обертання. Тоді координати крапок перетворяться по формулі
|
(4.12) |
Завдання обертання щодо довільної осі
Обертання щодо довільної осі також можна реалізувати за допомогою множення матриці на вектор, але попередньо цю матрицю треба побудувати. Припустимо, що пряма проходить через початок координат і задана одиничним вектором , і потрібно виконати поворот крапки на кут щодо її. Для цього скористаємося наступним алгоритмом:
Сполучимо пряму з віссю за допомогою повороту системи координат щодо осі на кут , а потім повороту щодо осі на кут .
Виконаємо поворот щодо осі на кут .
Виконаємо повороти системи спочатку щодо осі на кут
 ,
а потім щодо осі
на
кут
,
а потім щодо осі
на
кут
 (у
зворотному порядку стосовно перших
поворотів), тим самим повертаючи її у
вихідне положення.
(у
зворотному порядку стосовно перших
поворотів), тим самим повертаючи її у
вихідне положення.
Підсумкова матриця перетворення, таким чином, є добутком декількох матриць, а саме
![]()
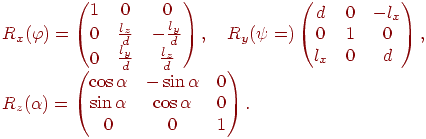
Матриці
![]() є
матрицями перетворення координат при
поворотах системи координат, як було
показано в попередньому розділі.
Визначимо спочатку кут
,
що є кутом між віссю
і
його проекцією вектора
на
площину
є
матрицями перетворення координат при
поворотах системи координат, як було
показано в попередньому розділі.
Визначимо спочатку кут
,
що є кутом між віссю
і
його проекцією вектора
на
площину
![]() .
Нехай
.
Нехай
![]() -
довжина цієї проекції. Тоді
-
довжина цієї проекції. Тоді
![]() ,
(синус негативний, оскільки поворот іде
від осі
до
осі
,
тобто в негативному напрямку). Після
повороту системи координат новими
координатами вектора
будуть
,
(синус негативний, оскільки поворот іде
від осі
до
осі
,
тобто в негативному напрямку). Після
повороту системи координат новими
координатами вектора
будуть
![]() .
Кут
-
це кут між векторами
.
Кут
-
це кут між векторами
![]() й
,
тому
й
,
тому
![]() .
Тепер ми можемо виписати вид матриць
перетворення координат для кожного
кроку алгоритму, зважаючи на те, що
матриці перетворення координат при
повороті системи координат оборотні
стосовно відповідних матриць обертання:
.
Тепер ми можемо виписати вид матриць
перетворення координат для кожного
кроку алгоритму, зважаючи на те, що
матриці перетворення координат при
повороті системи координат оборотні
стосовно відповідних матриць обертання:
Неважко
переконатися, що послідовне множення
матриць
![]() і
і
![]() на
вектор
дадуть
у результаті вектор
на
вектор
дадуть
у результаті вектор
![]() ,
тобто цей вектор дійсно стане віссю
аплікат.
,
тобто цей вектор дійсно стане віссю
аплікат.
Залишається
тільки виписати остаточний вид матриці
![]() (для
скорочення запису введемо наступні
позначення:
(для
скорочення запису введемо наступні
позначення:
![]() ):
):
|
(4.13) |

Нагадаємо,
що
![]() є
напрямними косинусами прямої, щодо якої
виконується поворот. Неважко переконатися,
що якщо як осі обертання взяти осі
координат, то ми в точності одержимо
формули (4.10).
є
напрямними косинусами прямої, щодо якої
виконується поворот. Неважко переконатися,
що якщо як осі обертання взяти осі
координат, то ми в точності одержимо
формули (4.10).