

ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
В данной курсовой работе необходимо выполнить расчет системы управления электропривода, разработать функциональную и принципиальную схемы, составить программу работы системы на Ассемблере, описать ее и реализовать на лабораторном стенде. Исходные данные приведены в таблице 1.
Таблица 1 – Исходные данные
Мст, кг·см |
Схема |
Тип привода |
Управление |
Тип задания скорости |
Кол-во дискретных скоростей, об/мин |
Наличие реверса |
Индикация |
3 |
уни |
скор |
симметр |
дискр |
7:1/2/4/8/100/200/400 |
- |
об/мин |
Параметры выбранного шагового двигателя приведены в таблице 2.
Таблица 2 – Каталожные данные двигателя FL42STH47-0406A2
Рабочий ток/фаза, А |
Сопротивление/ фаза, Ом |
Индуктивность/ фаза, мГн |
Крутящий момент, кг·см2 |
Длина, мм |
Момент инерции ротора, г·см2 |
0,4 |
30 |
25 |
3,17 |
48 |
68 |
ОГЛАВЛЕНИЕ
1 ФУНКЦИОНАЛЬНАЯ СХЕМА 5
2 ВЫБОР ТИПА УПРАВЛЯЮЩЕГО УСТРОЙСТВА 6
3 РАЗРАБОТКА И ОПИСАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ СИСТЕМЫ УПРАВЛЕНИЯ 9
3.1 Выбор требуемых источников питания 9
3.2 Выбор силовых ключей 10
3.3 Выбор коммутационной аппаратуры, элементов управления и индикации 10
3.4 Составление принципиальной схемы системы 11
3.4.1 Выбор резисторов 11
3.4.2 Выбор конденсаторов 12
4 РАСЧЕТ ВРЕМЕННЫХ ДИАГРАММ РАБОТЫ ЭЛЕМЕНТОВ 13
СИСТЕМЫ 13
5 РАЗРАБОТКА ПРОГРАММЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА 14
(ДЛЯ КОНТРОЛЛЕРА ATmega8535) 14
5.1 Описание выбора и расчета элементов программы 14
5.2 Листинг программы 16
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 21
1 Функциональная схема
Рисунок 1 – Функциональная схема системы управления
1.1Описание функциональной схемы
Младшие четыре бита порта «A» микроконтроллера устанавливаем на ввод сигналов с тумблеров:
РA0 – «разрешение»;
РA1, РA2, РA3 – на задание скоростей.
Младшие четыре бита порта «B» микроконтроллера устанавливаем на управление обмотками ШД:
РB0 – А+;
РB1 – В+;
РB2 – А-;
РB3 – В-.
Весь порт «D» определим на вывод на сегменты индикаторов.
Младшие биты порта «С» микроконтроллера – на вывод на катоды индикаторов:
PС0 – HG1;
PС1 – HG2;
PC2 – HG3.
2 Выбор типа управляющего устройства
В соответствие с функциональной схемой количество входов-выходов
равно 19. В качестве управляющего устройства был выбран микроконтроллер ATmega8535 фирмы Atmel. Его технические данные приведены в таблице 3.
Таблица 3 – Технические данные ATmega8535
№ |
Параметр |
Значение |
1 |
Память программ (FLASH), кБ |
8 |
2 |
ОЗУ (Static RAM), байт |
512 |
3 |
Память данных (EEPROM), байт |
512 |
4 |
Рабочая тактовая частота, МГц |
0…16 |
5 |
Напряжение питания, В |
4,5…5,4 |
6 |
РОН |
32х8 |
7 |
8-разрядный таймер/счетчик |
2 |
8 |
16-разрядный таймер/счетчик |
1 |
9 |
10-разрядный АЦП, каналов
|
8 |
10 |
Встроенный аналоговый компаратор |
+ |
11 |
Программируемые входы/выходы |
32 |
12 |
Внутренний RC-генератор |
+ |
13 |
Внутренние и внешние источники прерывания |
+ |
14 |
Последовательный интерфейс USART |
+ |
15 |
Последовательный интерфейс SPI |
+ |
16 |
Количество команд |
130 |
17 |
Последовательный интерфейс I2C |
+ |
18 |
ШИМ, каналов |
4 |
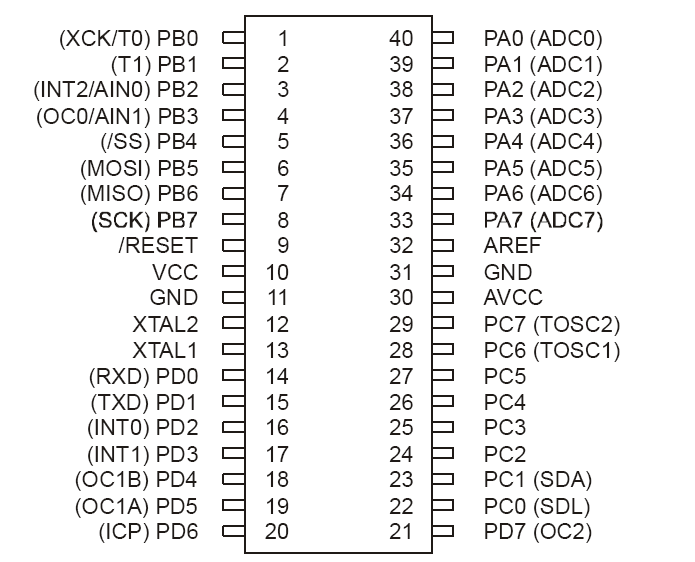
Рисунок 2 – Назначение выводов микросхемы
Назначение выводов:
RESET – сброс микроконтроллера;
VCC – напряжение питания;
GND – общий провод;
XTAL1, XTAL2 – подключение кварцевого резонатора;
AVCC – аналоговое питание для АЦП;
AREF – внешний источник опорного напряжения для АЦП;
PA0…PA7 – Выводы порта А;
PB0…PB7 – Выводы порта B;
PC0…PC7 – Выводы порта C;
PD0…PD7 – Выводы порта D.
Альтернативные функции выводов:
XСK – внешний тактовый вход интерфейса USART;
T0, T1 – входы таймеров Т0, Т1;
OC0, OC1A, OC1B, OC2 – выходы таймеров Т0, Т1, Т2;
ICP – вход захвата таймера Т1;
INT0, INT1, INT2 – входы внешних прерываний;
AIN0, AIN1 – входы аналогового компаратора;
SS – сетевой режим по интерфейсу SPI;
MOSI – выход интерфейса SPI;
MISO – вход интерфейса SPI;
SCK – тактовый вход интерфейса SPI;
RXD, TXD – вход и выход USART;
SDA, SDL – линии последовательной передачи данных и тактовых импульсов по шине I2C;
TOSC2, TOSC1 – выводы подключение часового резонатора 32768 Гц;
ADC0…ADC7 – каналы АЦП.