

Х арактеристический полином и его производная
Ч ислитель
передаточной функции замкнутой САУ по
задающему воздействию
ислитель
передаточной функции замкнутой САУ по
задающему воздействию
У равнение
переходной характеристики
равнение
переходной характеристики
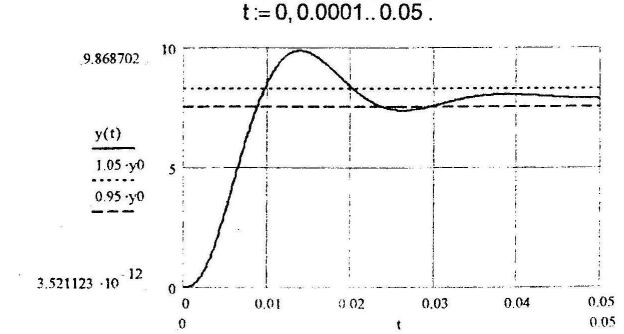
Расчет переходной характеристики
Показатели качества регулирования
А ) время переходного процесса
Б )
перегулирвоание
)
перегулирвоание
Таким образом, оба варианта коррекции САУ дают практически одинаковый вариант (во втором варианте немного выше быстродействие при одном и том же перерегулировании).
Следует сделать несколько замечаний:
При рассматриваемом способе формирования желаемой ЛАЧХ крайне редко удается выполнить требования одновременно по двум параметрам tпп и . Поэтому, достаточно обеспечить один из них (например, перерегулирование), а второй – как получится.
Рассмотренный способ коррекции САУ позволяет обеспечить заданное перерегулирование только тогда, когда постоянная времени в цепи обратной связи много меньше постоянных времени других инерционных звеньев САУ (в рассмотренном примере она равна нулю). Если это условие не выполняется, то перерегулирование может получиться очень большим. Тогда частоты 3 и 4 следует выбирать такими, чтобы обеспечивалось заданное время переходного процесса.
Возможное увеличение порядка системы (при наличии колебательного звена, он может достигать шестого) не влияет на обеспечение требуемых показателей качества регулирования для скорректированной САУ.