

Введение
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин, и ее изучение опирается на ряд фундаментальных общеобразовательных и общетехнических дисциплин – математики, информатики, общей электротехники и электроники и т.д.
Целью настоящей курсовой работы является самостоятельное закрепление теоретических знаний по непрерывным линейным системам автоматического управления, полученных на лекциях, практических занятиях и лабораторных работах. Курсовая работа предусматривает самостоятельное выполнение синтеза и анализа следящей САУ. Синтез производится с помощью ЛАЧХ и ЛФЧХ.
Система интегрированного программирования MathCad является хорошим инструментальным средством для решения задач ТАУ. Основы пользования пакетом изучались в курсе «Спец. Главы информатики». При решении задач по курсу ТАУ необходимо знать и использовать дополнительные возможности пакета, как формирование функций из отрезков прямых линий, определение корней линейных алгебраических уравнений, решение трансцендентных уравнений, нанесение на график логарифмической шкалы, интерполяция и математическая регрессия для данных, представленных в виде векторов.
Приобретенные навыки приемов и методов, применяемых при анализе и синтезе систем автоматического управления, будут использованы в изучении дисциплин «Автоматизированный электропривод», «Моделирование систем».
Структурная схема исследуемой системы показана на рис.1.
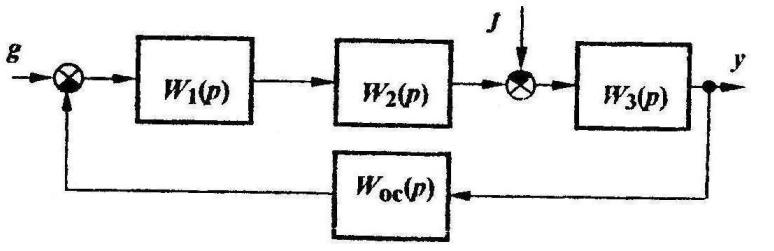
Рис.1.
В курсовой работе необходимо
Определить типовые звенья, входящие в структуру САУ.
Определить передаточные функции САУ и ее характеристический полином.
По критерию устойчивости Гурвица определить устойчивость САУ, рассчитать граничное значение коэффициента передачи разомкнутой цепи и построить область устойчивости САУ относительно варьируемых параметров Х1 и Х2.
Построить статические и внешние характеристики для заданной САУ и для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде G. Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты.
Для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде G, рассчитать асимптотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику (ЛФЧХ) и определить запас устойчивости по фазе .
Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде G, рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования.
Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде G, рассчитать переходные характеристики по задающему g и возмущающему воздействиями, определить по ним показатели качества регулирования и сравнить результаты с ранее полученными.
Исходя из заданного времени переходного процесса tпп и перерегулирования = 25% провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
Курсовая работа выполняется в виде расчетного файла с использованием пакета MathCad. Расчеты необходимо снабжать текстовыми комментариями и выводами.
Вариант курсовой работы выдается преподавателем. Исходные данные для вариантов курсовой работы приведены в приложении П1, а пример ее выполнения в разделе 1.