

1. Элементы земного магнетизма, графическое представление. Структура МП Земли. Нормальное МП. Современное представление об источниках МП Земли; спутниковые данные о магнитосфере.
Пространство,
где обнаруживается действие магнитных
сил, наз-ся МП. Оно изм-ся в простр-ве и
во времени, магнитная индукция и магнитная
напряженность описывается полным
вектором
![]() ,
который имеет определенное направление
и определенную величину
-это
полный вектор напряженности МП или
индукции, это есть касательная проведенная
в любой точке земного шара к силовой
линии. В северном полушарии
наклонен вниз, в южном полушарии
направлен вверх. Измерить векторную
величину трудно, поэтому были разработаны
приборы, измеряющие проекции вектора
на координатные оси следующей системы:
(в любой точке наблюдения-точку принимаем
за 0)(Рис.1).Напряженность МП принято
рассматривать по составляющим
прямоугольной системы координат в
которой ось х горизонтальна и направлена
на географический север, ось у также
горизонтальна и направлена на восток,
ось z вертикальна и направлена вниз.
Составляющие вектора напряженности
поля Т по осям соответственно называются
северной X, восточной Y и вертикальной
Z. Проекция вектора Т на горизонтальную
плоскость называется горизонтальной
составляющей Н
,
который имеет определенное направление
и определенную величину
-это
полный вектор напряженности МП или
индукции, это есть касательная проведенная
в любой точке земного шара к силовой
линии. В северном полушарии
наклонен вниз, в южном полушарии
направлен вверх. Измерить векторную
величину трудно, поэтому были разработаны
приборы, измеряющие проекции вектора
на координатные оси следующей системы:
(в любой точке наблюдения-точку принимаем
за 0)(Рис.1).Напряженность МП принято
рассматривать по составляющим
прямоугольной системы координат в
которой ось х горизонтальна и направлена
на географический север, ось у также
горизонтальна и направлена на восток,
ось z вертикальна и направлена вниз.
Составляющие вектора напряженности
поля Т по осям соответственно называются
северной X, восточной Y и вертикальной
Z. Проекция вектора Т на горизонтальную
плоскость называется горизонтальной
составляющей Н
![]() .
.
У гол
образуемый составляющей Н и осью х,
называется склонением и обозначается
D. Угол между плоскостью хОу и вектором
Т наз-ся наклонением и обозначается I.
T,Z,H,X,I,D,Y-линейные элементы или векторные
элементы земного магнитизма. Аномалия
горизонтальной составляющей Н на полюсах
=0. На экваторе Z=0. I на экваторе =0, на
полюсе =90, в Перми =55. Т измеряется в
Эрстедах.
гол
образуемый составляющей Н и осью х,
называется склонением и обозначается
D. Угол между плоскостью хОу и вектором
Т наз-ся наклонением и обозначается I.
T,Z,H,X,I,D,Y-линейные элементы или векторные
элементы земного магнитизма. Аномалия
горизонтальной составляющей Н на полюсах
=0. На экваторе Z=0. I на экваторе =0, на
полюсе =90, в Перми =55. Т измеряется в
Эрстедах.
Структура МП
На показания магнитометра оказывает действия Т – полный вектор напряженности маг.поля.
Т = Т0 + Тм + Тр + Тл + ∂Т(6 %)+
Т0 – МП однородно-намагниченного шара, Тм – маг.поле материков, Тр – маг.поле отдельных регионов,
Тл – маг.поле локальных структур, ∂Т – внеш м.п. вариаций,
Изучаемое маг.поле в геофизике называется аномальным. Фон , на котором росматривается аномалия называется нормальным.(Т0=Тм – Тн)
Современные представл о причинах м.п. Земли.
94% мп Земли создается внутрен причинами, 6%- внешними (солнце). Сущ ряд гипотез:
1)Предполож базируются на действии постоянной намагниченности гп земных недр. Однако известно, чтотемп-ра З уже на глуб неск км превышает т Кюри ферромагнитных минералов, поэтому постоянного намагнич не может там происходить. Или поверхн слой З должен состоять из магнетита.
2)Теория геомагнитного динамо. Основ на существовании жидкого внешнего ядра.Тепловая конвекция, те перемещение в-ва во внеш ядре, способств образованию кольцевых электрич токов.Скорость перемещ в-ва в верхней части жидкого ядра меньше, а в нижних- больше, чем в мантии. Медленные течения вызыв формир кольцеобраз (тороидальных), замкнутых Эл-их полей, наход в ядре. При взаимодействии тороидал эл полей с конвективными течениями во внеш ядре возник суммар магнит поле дипольного хар-ра, ось которого примерно совпад с осью вращ З.
МП нашей планеты в первом приближении можно рассматривать как поле шара, намагниченного по оси, отклоняющейся от оси вращения приблизительно на 11 градусов. Распределение МП (МП); на Земле действует поток солнечных карпускул. Со стороны падания солнечных лучей силовые линии приближаются к пов-ти земли и с др. стороны отдаляются.
Х арактеристика
магнитосферы;
арактеристика
магнитосферы;
1-направление солнечного ветра, 2-силовые линии геоМП, 3-магнитопауза; 4-фронт ударной волны, 5-Зона радиационного захвата(радиационные пояса), 6-плоскость экватора; 7-пути перемещения заряженных частиц, обтекающих магнитосферу, 8-места проникновения заряженных частиц в зону захвата (каспы).
Солнечный ветер представляет собой поток заряженных карпускул, летящих со скоростью 400км/сек. Силовые линии МП под действием солнечного потока приближаются к земле, размеры пространства занимают 10 радиусов земли и называются лобовым прост-м. С теневой стороны земли силовые линии напряж-ти МП не замык-ся, а вытягиваются в виде магнитного хвоста. Хвост удаляется на огромное расстояние и ср-й размер равен 1000 радиусов земли. Магн-й хвост охватывает и другие планеты. Все простр-во МП наз-ся магнитосферой. Граница ограничивающая магнитосферу наз-ся магнитопаузой, предст-т собой слой толщиной 100-200км – токовая система, поток электрического тока. М/у магнитопаузой и карпускулярным потоком сущ-т переходная зона в которой солнечные карпускулы замедляют свою скорость, отталкиваются от магнитопаузы или переходят в токовую систему. Окрестности магнитных полюсов наз-ся магнитными каспами (опасные зоны).
2. Вариации МП Земли. Изменение МП во времени. Типы магнитных вариаций: возмущенные и невозмущенные, магнитные бури; их происхождение, причины и пространственно-временная структура. Учет вариаций при производстве магнитных съемок.
Изменения МП во времени называются магнитными варияциями. Они делятся:
1)Невозмущенные - изменение МП хар-ся опред., законом, имеют опред период, амплитуду и частоту. На ход вариаций влияет: сезонность, время года, деятельность Солнца.
1.1)Периодические – это изменения, кот-е имеют постоянный период и амплитуду. К ним относятся :
а) Вековые вариации. Они Т=100 лет, А= неск нТл. Имеют причины, происходящие внутри земли на границе ядра и мантии.
б) Годовые вариации. Оцениваются как ср арифм за год и зависят от процессов в земн коре и деятельн солнца. В течении года амплитуда маг поля изменяется по месяцам. Наибольш ампл весной и осенью, наименьш зимой и летом. Все зависит от положения экватора и плоскости эклиптики солнца. Если пл-ть экватора приближ к пл-ти эклиптики, то наступает время равноденствия – мах активности. Во время солнцестояния амплитуда МП уменьшается. Т=1год, А= до 10 нТл.
в)27- дневные
г)Солнечно-суточные вариации (Вариации склонения ∂D) имеют период = солнечным суткам, амплитуда изменяется на 10 – 20 нТл и ССВ протекают по местному времени и одинаковы для одной и той же широты.
Причины: под действием солнечных корпускул и солнечного света атмосфера на высоте 100 – 120 км ионизируется, разделяется на заряженные частицы – «+» и «-» и образует кольца электр тока около 30 градусов сев и юж широт. В воздухе стоит кольцо электр тока, Земля вращ, проходит линию кольца и около земли наводятся солнечно-суточные вариации.
д) Лунно-суточные вариации (ЛСВ). Изменение МП с периодом = 0,5 лунных суток, и имеющ ампл в неск-ко нТл, менее 10. ЛСВ учитываются в рай-х полярного круга, если наблюдения ведутся ночью. Лунные сутки 24 50’ 28’’.
1.2) Непериодические вариации –изменение МП с постоянным периодом, но меняющейся амплитудой. Классификация таже.
2) Возмущенные вариации – изменение МП без опред-й ампл с переменн периодом и неизвестной фазой.
2.1) Магнитные бури(МБ) – сильные возмущенн магнитн вариации, не имеющие ни периода , ни фазы. Они начин и заканч неизвестно когда, распростр одновременно по всей Земле. Возникнув в одном месте, МБ распространяется по силовым линиям МП. Ампл м.б. несколько 1000 нТл.. В этот момент затруднено мореплав и полет. Идет нарушение электрич проводимости в ионосфере. В году МБ могут появляться неск-ко раз. Их появление зависит от солн активности.
Причины: Солн корпускулы сдавл сил линии магнитосферы. Деформация сил линий приводит к их дребезжанию и возмущению МП. Если солн корпускулы залетают в магнитосферу , то они не падают на землю , а движутся по закону прецесии в сторону сев полюса. В обл сев полюса происх накопл заряженн частиц одноименн заряда и при их большом скоплении происходит столкновение с излучением эл.магн поля. Ночью со стороны магн хвоста через плазменную область может происходить внедрение солн корпускул к поверхности земли и тогда возникают сильные МБ, обычно в 4 – 5 часов утра.
2.2) Короткопериодные колебания – возмущенн вар, имеющие период менее 1 мин, ампл до 10 нТл. Причина кроется в наличии теллурических токов около поверхности земли
Мера магн активности- параметр, оценивающий магнит актив, если МП спокойное на уровне солн-суточ вариаций, если не изменяется Т, А и f, то активность=0.
3. Мех-м намагн-я г.п. Магнетизм, его происх-е, магн-е св-ва атома и его сост-х. Нам-ть. Магн. воспр-ть. Природные минералы диам и парамаг. Ферромагн-е минералы, их нам-ть.
Магнитные св-ва физ тел обуславливаются движением электрич зарядов, образованных движением e в оболочке атома (орбитальный магн мом), а также токов внутри ядер дв-я р и n.
Природа магнетизма.Осн магн хар-й явл. магн. индукция, кот хар-т отн-я магн-го потока Вебера к одному м.
Напряженность – 2ая хар-ка, хар-я распределение силовых линий МП.
Причина МП:1.Движение е по орбите при создании ими орбитального магн. момента, т.к. каждый е вместе с эл. зарядом имеет магн. момент. 2. Каждая элем-я частица: e, p – облад спиновым магн. моментом, т.е. частицы вращ-ся вокруг собств оси, создавая общий спиновый магн. момент и ларморовую прецессию (движение юлы). Вместе два эффекта создают суммарный магн момент.
-е, за счет своего магн мом, созд вокруг себя эл ток во время движения, который создает МП. Каждый е создает вокруг себя МП за счет движения по орбите и вокруг собств оси. Создается суммарное мп В=В0 + Вс (спин).е приобретает намагниченность I=ef. Процесс отдачи и намагничения идет только при наличии внешн поля, иначе е вращается беспорядочно. Общий суммар момент (М) =0. Под действ внеш МП мом устанавл в опред направл (по направл внешн МП). –p – движется по закону прецессии (вращ вокруг собств оси). Масса р в 1836,5 раз б массы е, след-но доля магнетизма от р велика. Если р вращается без МП, то мом-ы располагаются хаотично (ΣМ=0). При наличии МП каждый р вращ вокруг направл внешн МП с частотой приблиз = амплитуде магн инд. Созд-ся сильн магн эф-т.
Н![]() амагниченность
(I) – это спосбность г.п. отдавать МП. При
внесе-нии в-ва в МП в-во начинает намагнич
под действием магн. индукии или напряженн
по направл действующего поля. В-во
приобретает намагниченн и потом само
отдает МП. Коэф. пропорц-ти между величиной
намагнич-ти и напряженностью МП наз.
магнитн. восприимчивостью (ǽ) – это
способность г.п. воспринимать МП.
амагниченность
(I) – это спосбность г.п. отдавать МП. При
внесе-нии в-ва в МП в-во начинает намагнич
под действием магн. индукии или напряженн
по направл действующего поля. В-во
приобретает намагниченн и потом само
отдает МП. Коэф. пропорц-ти между величиной
намагнич-ти и напряженностью МП наз.
магнитн. восприимчивостью (ǽ) – это
способность г.п. воспринимать МП.
Намагниченность– векторная величина, ее направление зависит от направления вектора намагничивающего поля в момент образования г.п.. Намагн-ть, приобретенная в прошлые геол. эпохи, наз. Остаточной (In), а приобретенная за счет действия современного поля наз. Индуцированной (Ii). I= Ii + In = ǽH + In
Сущ разл механизмы намаг-я. В соотв с ними в-ва в природе подраздел на: диа-, пара-, ферро- и феррим-ки.
Диамагнетики- в-ва, М атомов которых в отсутствии внеш мп =0, так как М всех е взаимно скомпенсированы.Атомы диамагнетиков приобрет в магнит поле М, противополож направ действия первич поля. В-ва становятся источ дополнит поля, те в-во намагничивается. Все диамагнетики имеют отрицательную магн. восприимчивость.(-160*10-6 ед.СИ). Cu. Au, Ag, Pb, S, As, H, N, гипс , кварц.
Парамагнетики- в-ва, атомы к-ых в отсутствии внеш магн поля имеют отличный от 0 М, кот-й связан с орбитал движением е в атомах и их спиновыми М. При внесении в МП мом-ы атомов прецессируют вокруг направ магнит инд В с ларморовской скоростью. Тепловое движение атомов вызывает только столкновение их друг с другом. Совместное возд теплового и МП приводит к преимущ-ной ориент собств мом-ов атомов по направ внеш поля, поэтому парамагнетик намагн-ся. (10-5 – 10-3 едСИ). Cr, Mo, W, U, Mn, Pt, б-во пород.
Ферромагнетики- тв в-ва, облад-е при несликом высок темп-х самопроизвольной намагн-тью, к-ая изменяется под влиянием внеш воздействий- магнит поля, деформации, температуры. Внутреннее магнит поле в сотни и тысячи раз больше внешнего. Для ферромагнетиков природа магнетизма наз-ся доменной. Ориентация электронов происходит не во всем объеме вещ-ва, а в очень маленьком объеме, кот. наз. доменом, = 10-8см. В этом объеме электроны также группируются по единому направлению, но не обязательно совпадающим с направлением внешнего МП. Домены располагаются в г.п. произвольно в зависимости от структуры вещ-ва. При намагничивании г.п. процесс намагничивания идет засчет обменных электронов между доменами и новой группировки доменов. Ферромагнетики намагничиваются по закону, кот. характ-ся кривой насыщения. Если увеличивается напряженность МП (H), то растет I. Макс амплитуда наз. намагниченностью насыщения (Is ). При уменьшении Н кривая намагн-ти пойдет по новому пути, переходит в область отрицательного значения I, выходит на ассимптоту, при дальнейшем увеличении Н происходит рост амплитуды I. Кривые изменения намагниченности при изменении напряженности МП объединяются в петлю гистерезиса. Отрезок OF наз. коэрцетивной силой – это сила, необходимая для полного размагничивания магнита.
N- коэф. размагничивания, кот. зависит от формы образца и доменной структуры.
Взавис от положения М: 1)Взаимно паралел друг другу – ферромагнетик; 2) Взаимно антипаралел скомпенсированное. Атомные моменты = по величине и направ в противополож ст- антиферромагнетики; 3) Взаимно антипаралел нескомпенсир. Такой вид фурромагнит упорядочения сохран до темп Неля- ферримагнетизм Неля. В-ва- ферримагнетики; 4) Взаимно квазиантипаралел. Магнетит, гематит, пирротин, титано-магнетит. (104 – 105 едСИ). При нагревании ферромагнетика до т Кюри тепловое движение разрушает облпсти спонтанных намагниченностей, в-во теряет свои особые магнитные св-ва и ведет себя как парамагнетик.
4. Методы измерения элементов земного магнетизма. Принцип действия. Выбор типа аппаратуры для магнитных съемок при решении различных геологических задач.
T![]() ,
Z, H, X, Y, I, D – элементы земн. матнетизма.
Методы измерения элементов земн.
магнетизма делятся на относительные и
абсолютные. Относительным методом
измеряют горизонт. и вертик. составляющие
ΔH и ΔZ (оптико-механические приборы,
феррозондовые). Абсолютным методом
(протонные и квантовые) измеряют
аьсолютные значения полного вектора
Т, склонение, горизонтал составл,
наклонение. Основные требования к
аппаратуре: точность, быстродействие.
Выбор аппаратуры осуществляется в
зависимости от поставленных геолог-их
задач. Магнетитовые местор-ия – компас,
М-27, аэромагн. съемка, феррозонд.
Магнитометры. При иных геол. работах:
протонные и квантовые магнитометры.
,
Z, H, X, Y, I, D – элементы земн. матнетизма.
Методы измерения элементов земн.
магнетизма делятся на относительные и
абсолютные. Относительным методом
измеряют горизонт. и вертик. составляющие
ΔH и ΔZ (оптико-механические приборы,
феррозондовые). Абсолютным методом
(протонные и квантовые) измеряют
аьсолютные значения полного вектора
Т, склонение, горизонтал составл,
наклонение. Основные требования к
аппаратуре: точность, быстродействие.
Выбор аппаратуры осуществляется в
зависимости от поставленных геолог-их
задач. Магнетитовые местор-ия – компас,
М-27, аэромагн. съемка, феррозонд.
Магнитометры. При иных геол. работах:
протонные и квантовые магнитометры.
1. Оптико-механич. приборы с крутильной нитью – горизонт. нить кручения (М-18, М-23, М-27, М-27М). Нить горизонт. на ней помещается магнитик .
1 – датчик – магнит, 2 – нить (кварцевая или металлическая), 3 – каркас крепления.
Метод измерения – компенсационный. Это значит, что внутрь прибора вмонтированы дополнительные магниты, кот. рабочую систему приводят в горизонт-ое положение. Под действием верт. составляющей датчик 1 наклоняется под углом i. Компенсацинные магниты разворачивают систему в горизонт, фиксируется угол наклона. В основе датчика оптико-механ. приборов положены законы связи изменения элементов земн. магнетизма с механич-ми силами. Датчиком может быть стрелка или магн. система. Визуальное наблюдение за работой приборов осущ-ся через оптическую систему.
Приборы для измерения склонения (угол м/у магнит и географ мерид) наз-ся деклинаторами. D=na - nm (na –отсчет положения астроном меридиана, nm- отсчет полож магнитного мерид). Склонение можно измерить компасом, буссолью. Деклинатор предст-ет собой постоянный магнит, подвешенный на вертик-ой нити. Магнит уст-ся по направ магнит мерид; за его полож следят через оптич трубку.
Приборы для измерения наклонения наз-ся инклинаторами. Они бывают стрелочные (предст-ет собой вертик. пластинку с располож-ой на ней в центре магн. стрелкой) и индукционные (предст-ют собой рамку с большим кол-ом витков, при вращении в магн. поле, в катушке индуцир-ся ЭДС, если ось вращения совпадает с направлением, когда ЭДС=0, то угол наклона оси = наклонению).
2.Феррозондовые исп-ся при наземн. съемке, аэромагн. съемке, морских исследов-ях и скваж-х наблюдениях. В основу работы датчиков положен эфф-т реакции магнит проницаемости пермаллоя сердечников на действие постоян магнит поля З при питании их перемен током. Перммаллоевый сердечник способен намагн вдоль большей оси значительно выше, чем в попереч направл. След-но, можно считать, что б-ая, длинная ось является проекцией вектора внеш поля и она д/б в процессе измерения ориент в направ измеряемой составл.
Феррозонд состоит издвух соед паралел катушек с одинак технич парам. Катушки питаются синусоид-ым переменным током с частотой 200-700 Гц. Обмотки катушек возбуждения соед послед-но т.о., чтобы перемен поле в двух сердечниках было направ противоположно. Эти катушки охват-ся третьей- выходной катушкой. 1, 2 – входные катушки, 3 – выходная. Для измер внеш магнит поля обычно исп компенсац метод, заключ в компенсации постоян магнит поля Щ полем постоянного регулируемого тока.По велич тока компенсации судят о напряженности магнит поля З вдоль оси феррозонда (АМФ-21). В завис от величины подаваемого напряж феррозонд может работать по принципу пик-типа и второй гармоники.
Исп-ся при конструировании аэромагнитометров и скважинных приборов (ТМ-3)., для исслед космич пр-ва (для измер внеш полей, автоматич ориент искусств спутников З в геоцентрической системе корд.-комплект СПРУТ-VI на станции МИР ), в магнитной дефектоскопии (для обнаруж поверхн дефектов, котроля кач-ва проката и сварных труб, диагностики состояния рельсовых путей) Измеряет относит изменения любой (в завис от ориент датчика) компоненты магнит поля. Чувств от неск нТл до 200 нТл.
3. Протонные магн-ры. Работают по принципу прецессии протонов в земном мп. Проотн вращается по вектору магнит индукции с частотой пропорц абсолют значению полного вектора магн инд. Рабочим веществом является жидкость (спмрт, дестилир вода, ацетон, керасин, бензин, эфирные масла), его помещают в сосуд с электрич катушкой. В момент включ эл тока все протоны ориент по направ внеш магнит поля.
1![]() – датчик с протоносодержащей жидкостью.
Датчик 1 через таймер 2 подключ. к батарее
поляризации 3 в теч. неск-их сек. (спиртовые
смеси – 3 сек., керосин – 1,6 сек.). После
этого времени, протоны продолжают
прецессировать вокруг вектора магн.поля
с частотой пропорцион-ой величине
вектора в теч. времени релаксации – 3
с, 1,6 с. В это время таймер 2 переключает
датчик 1 на усилитель 4, сигнал идет на
множительное устройство 5 – группа
усилителей и поступает на счетчик 6.
Фиксируется частота вращения. 7- генератор
высок частоты, 8- стабилизир каскад, 9 –
делитель частот, 10 – регистрирующее
устройство (экран).
– датчик с протоносодержащей жидкостью.
Датчик 1 через таймер 2 подключ. к батарее
поляризации 3 в теч. неск-их сек. (спиртовые
смеси – 3 сек., керосин – 1,6 сек.). После
этого времени, протоны продолжают
прецессировать вокруг вектора магн.поля
с частотой пропорцион-ой величине
вектора в теч. времени релаксации – 3
с, 1,6 с. В это время таймер 2 переключает
датчик 1 на усилитель 4, сигнал идет на
множительное устройство 5 – группа
усилителей и поступает на счетчик 6.
Фиксируется частота вращения. 7- генератор
высок частоты, 8- стабилизир каскад, 9 –
делитель частот, 10 – регистрирующее
устройство (экран).
Широко примен при произв морских съемок, тк имеют высокий порог чувств(МАМП-01, ММП-7, ЛМП-1, ММП-2Д, МАМП-Д, Дельта), назем (ММП-203), воздуш (МСС-214), скваж набл.
Протонные магн-ры с динамич поляризацией ядер. В кач-ве раб жидк берется смесь, содерж р и е, сцелью создания свобод е, способных возбуждать протоны. Смесь Фреми (соль) состоит из гептана ихимрадикалов, имеющ свобод е. Эффект двойного спин-спинового резонанса- принцип Оверхаузера: протоны гептана вращ в мп с опред частотой, а е под действием внеш эл поля меняют энергетич уровни, переходя с одной орбиты на другую, давая тем самым энергию протонам. Приборы исп для измер постоян вектора магнит инд, (измеряется частота вращ протонов). POS-1,ММП-203М1С, ММП-203М2, ММП-203МС, МИНИМАГ, ММПГ-1.
4![]() .
Квантовые магн-ры работают по эффекту
Зеемана (расщепление атомов с резонансной
частотой, переход электронов с одного
уровня на другой). f=(E1-E2)/ħ – частота
перехода
.
Квантовые магн-ры работают по эффекту
Зеемана (расщепление атомов с резонансной
частотой, переход электронов с одного
уровня на другой). f=(E1-E2)/ħ – частота
перехода
Блок схема квантового М-33, М-303, ММ-60. 1- генератор высокой частоты, 2-катушка возбуждения, 3-лампа с цезием, 4-линза Френеля, создающая прямолин. свет, кот. попадает на поляроид 5, где свет монохромотически поляриз-ся, 6-четверть – волновая пластинка (предст. собой две пластины, повернутые на 900. После выхода с 6 образ-ся монохромотич. поляризов-ый по кругу свет, кот. освещает рабочую камеру 7 рабочим вещ-вом. Свет из 7 идет на фокусирующую линзу 9, кот. собирает свет в пучок, и световые кванты идутна фотодетектор 10 (свет преобрз-ся в эл. ток). 8-катушка термостата, 11-частотомер, 12-счетчик, 13-фазовращатель (подключ. к цепи обратной связи). Прибор может работать в ручном варианте (от кнопки «пуск») и в автоматическом режиме, кот. осуществл-ся через фазовращатель 13.
Наземные (М-33, ММП-303, ММА-301,ММ-60), морские (КМ-2М,КМ-29,КМ-3), аэро КАМ-28,АКМ-01, МГМ-05.
5. Криогенные магнитометры. Сверхпровод квантовые интерференционные приборы (СКВИД). Основ на эфф Джозевсона- протекание сверхпровод тока через тонкий слой диэлектрика, разделяющий два сверхпроводника (Контакт Джозевсона). В кач датчика исп либо сверхпровод кольцо, либо сверхпровод трансформ потока. При помещении устр-ва во внеш поле возникает индукц ток, к-ый будет полностью компенс поток внеш магнит поля. Измеряя этот ток, можно опред внеш мп В.
Исп в медицинской диагностике ( магнитокардиографии, магнитоэнцефалографии); в г/ф для изуч измен магн св-в пород, обусл фильтрац и сейсмомагн эфф, для измер магнит вариаций и изуч гидродинам источ.
5.Методика магниторазведочных работ. Геологические задачи, решаемые магниторазв-й. Необход точн-ть и дет-ть набл-й, выбор напр-я профилей, густота сети точек набл-й. Понятие масштаба съёмки. Выбор высоты полета при аэромагн съемке.
Мет-ка пров-я маг/раз-х работ с целью поисков и разведки п.и. опр-ся поставл-й геол задачей.
В методику проведения маг-х съемок входят след вопросы: выбор модиф-и, расп-е пунктов и профилей набл-й по площади съемки, точность и контроль набл-й, топографо - геодезическая привязка, изобр-е рез-в съемки и масштаб отчетных мат-ов. По усл, в кот-х выпол-ся измер-я геомагн поля, съемки делятся на назем и воздушн. К наземным отн-ся: пешех и автом-я.
Осн-е ?сы методики пешеходных маг-х съемок: выбор вида съемки в зав-ти от геол-х задач; степень детальности исследования (масштаб съемки) и сеть точек измерений; выбор аппаратуры; точность измерений и способы её достижения; разбивка, геодезическая привязка и закрепление отдельных пунктов и линий наблюдений на местности и отображение их на карте; ведение полевой документации; сбор полевой информации; способы обработки полевых измерений и графическое оформление результатов съемки; дополнит г/ф и г/л работы для обеспечения наиболее полного г/л истолкования рез-в магнитных измерений.
Осн вопросы автомагнитки – постановка г/л задач, выбор участка, масштаб съемки, направление маршрутов и т.п. – общие с наземной магниткой. Специфика работ с автомобильн магнитометром обусловлена тем, что измерения МП выполняются в движении в условиях девиационного влияния автомобиля с постоянным интервалом между пунктами наблюдений.
Магнитка примен при г/л картир разл масштабов и при прямых поисках и разведке месторождений некот-х ПИ. Мелкомасштабные съемки проводятся при изучении особенностей глубинного геологического строения земной коры и при тектонич рай-нии. При тектонич рай-нии геосинклин обл по рез-м магн съемки выделяют границы между геосинклиналью и прилегающей платформой, границы предгорных и межгорных впадин, границы отдельных синклинориев и антиклинориев, а также зоны и группы разломов. На платформах – сведения о строении кристалличо фунд-та, глубину залегания, рельеф поверхности фундамента и некот-е детали его внутреннего строения. М.б. выделены крупные блоки фундамента, различающиеся глубиной залегания или составом и строением внутренних структур. По магн аном выявл и прослеживаются зоны разломов. По магн картам часто устанавл крупные структурные формы, в том числе и перспективные на нефть и газ.
Детальность наблюдений обуславливается масштабом съёмки. Расстояние между точками наблюдений по профилям зависит от формы сети, а форма, от хар-ра ожидаемого поля. Если аномалии изометричные в плане или вытянутые с сильно изменяющимся простиранием – сеть наблюдений должна быть квадратной. Если простирание аномалий примерно постоянно, сеть берётся прямоугольной. Профили в этом случае направляют вкрест простирания аномалий и расстояние между точками по профилю выбирают так, чтобы в пределы аномалии попало не менее 5 точек.
Расстояние между точками измерений по интерпретационным профилям обычно выбирают малым. В пределах отдельной аномалии может попасть до 15-20 точек и более. Детальность наблюдений считают достаточной, если с дальнейшим сгущением сети картина не изменяется.
Оптимальная точность измерений должна быть согласованной с интенсивностью минимальных ожидаемых аномалий и с фоном помех. Точность считается достаточной, если пред ошибка измер-й, приблизительно равная утроенной ср квадр ошибке одного измер-я, не превышает 10% амплитуды самой слабой ожид ан-и, но не намного меньше 0,3 амп-ды помех.
При выборе точности съёмки следует учитывать, что повышение точности всегда желательно. Например, при поисках магнетитовых месторождений для решения задачи прямых поисков достаточно низкой точности. Однако съёмка средней или высокой точности может дать попутно ценную информацию для геолкартирования.
Масштаб магнитной съёмки выбирается с расчетом, чтобы, с одной стороны, поставленная задача съёмкой была решена, с другой – чтобы число измерений на единице площади было минимальным. Масштаб выбирается таким, чтобы, в пределы минимальной аномалии попали точки одного или двух соседних профилей. Масштабы магнитных съёмок делятся на три категории: 1. Мелкий масштаб от 2 500 000 до 500 000 – в основном аэромагнитная съёмка
2. Средний от 200 000 до 100 000 – аэромагнитная и наземная
3. Крупный от 50 000 до 1 000 в основном для наземной съёмки
Аэромагнитная съемка. Съемка выполн на разных высотах; высота выбирается в завис от масштаба съемки: чем меньше М, тем больше высота полета и наоборот. Маршруты полетов проклад вкрест простирания геол образований. Выбирается контрол маршрут, к-ый располаг недалеко от аэродрома и пересекает весь участок. На контрольном маршруте ведутся измерения ежедневно утром и вечером, в начале и в конце полетов.
6. Магнитные аномалии как функции отображения параметров намагниченных источников. Интегральные представления для поверхностных и объемных источников.
Прямая
задача-это расчет аномального магн.
эффекта по известному геолог. разрезу.
У геолог. разреза должны быть даны
параметры магн. св-в и количеств, размеры
разреза. Каждый магнит, источник залегает
на своей глубине и обладает собственной
намагниченностью, что и отражается в
магн. поле-прямая задача в М/Р. Между
геолог.разрезом и распределением
магн.аномалий существует тесная
физико-математич. связь. Формула Пуассона:
![]()
где U-магн.потенциал, V-грав.потенциал, J-намагниченность, i-направление намагниченности,f-гравит.постоянная,σ-аном. плотность. V=f m/r, m- масса. V -объем шара,r-расстояние от центра шара до точки вычисления.
Тонкий пласт (интегрируем шток)
Ф ормула
для
ормула
для
![]() штока:
штока:
![]() (2-3)
(2-3)
Т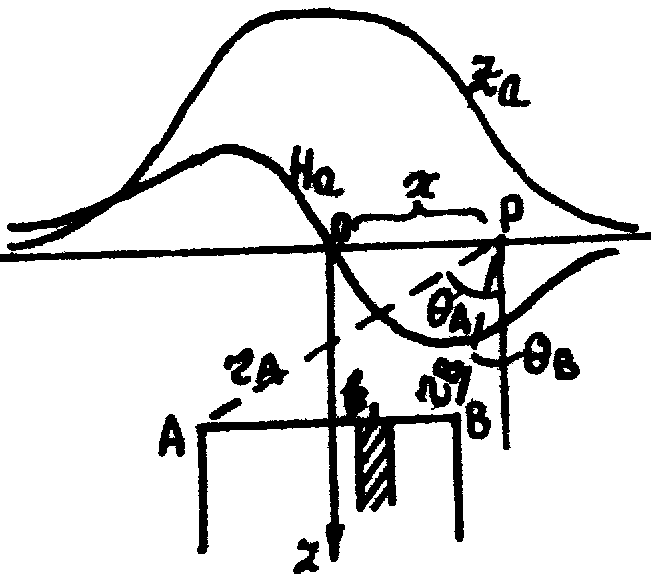 онкий
пласт 2b≤h (2b-поперечные размеры, h-глубина
залегания до верхней кромки). Тонкий
пласт заменяется совокупностью штоков
и записывают в трехмерном варианте с
учетом простирания и падения (ОХ ┴
простиранию пласта, ОУ вдоль простирания,
ОZ вертикально). Найдем влияние этого
штока в точке набл-я Р, для этого соединим
центр штока с т.Р. Тогда
онкий
пласт 2b≤h (2b-поперечные размеры, h-глубина
залегания до верхней кромки). Тонкий
пласт заменяется совокупностью штоков
и записывают в трехмерном варианте с
учетом простирания и падения (ОХ ┴
простиранию пласта, ОУ вдоль простирания,
ОZ вертикально). Найдем влияние этого
штока в точке набл-я Р, для этого соединим
центр штока с т.Р. Тогда
![]()
Расстояние от пласта до т. Р в ┴-ной плоскости
![]()
Перепишем
ф-лы для выбранного элементарн штока
![]()
![]()
![]() dm=J*S=J*dx*dy,
dx=2b (для произвольно выбранного штока)
dm=J*S=J*dx*dy,
dx=2b (для произвольно выбранного штока)
Введем нов. переменные r02=x2+h2, тогда
![]()
Введем нов. переменную, т.е. обозначим угол м\у направлением r0 и r ч\з φ , тогда tgφ=y\r0 → y=r0*tgφ → dy=r0*sec2φdφ
![]()
![]()
![]()
Аналогично
![]()
Мощный пласт – решение прямой задачи ведется путем интегрирования формулы тонкого пласта, который вырезается из мощного.
Z=2J; -угол видимости верхней кромки
H=Jln(r12 /r22);
Z=2Jarctg(2bh/(x2-b2+h2)
H=Jln(x+b)+h2/(x-b)2+h2)
2b>>h
7. Магнитные аномалии как функции совокупности параметров источников. Дифференциальный подход к решению прямой задачи. Решение прям и обр задачи
Полный
вектор геомагнитной индукции связан
зависимостью с вертикальной и
горизонтальной составляющими
![]() .
Полный вектор ориентирован по
наклонению(I)МП и, следовательно,
зависимость его при перемещении по
профилю является сложной.
.
Полный вектор ориентирован по
наклонению(I)МП и, следовательно,
зависимость его при перемещении по
профилю является сложной.
Если
Zn и Нn – нормальные и Za и Нa - аномальные
значения, то![]()
![]()
Угол между векторами равен разности наклонений. Отвеличины этой разности зависят величина аномального вектора Та и разность модулей Т-Т0=∆Т. Считая что Тi и Т0 по направлению совпадают, существованием вектора Та можно пренебречь и можно написать следующую приближенную формулу:
![]()
Если учесть зависимость от наклонения можно написать:
![]()
График
![]() по профилю зависит от соотношения
значений Za и Нa. Влияние Нa почтив три
раза меньше, чем Za .
по профилю зависит от соотношения
значений Za и Нa. Влияние Нa почтив три
раза меньше, чем Za .
Прямую задачу в магниторазведке решают либо аналитическим, либо графическим способом. Прямая задача в силу известных свойств потенциала и его производных всегда имеет единственное и однозначное решение.
Решение
прямой задачи основывается на
предположении, что любое намагниченное
тело можно рассматривать как систему
бесконечно большого числа магнитных
диполей с упорядоченно расположенными
осями магнитных моментов. Тогда если
объём намагниченного тела V, а вектор
намагничения
![]() ,
то
,
то
![]() -
магнитный момент бесконечно малого
объема dV. В этом случае для потенциала
U в точке p, находящейся на расстоянии r
от элементарного объема dV намагниченного
тела, можно записать
-
магнитный момент бесконечно малого
объема dV. В этом случае для потенциала
U в точке p, находящейся на расстоянии r
от элементарного объема dV намагниченного
тела, можно записать

где вектор (grad1/r) направлен по r в сторону его возрастания. Если объем ограничен некоторой поверхностью s, тогда потенциал находим по формуле
![]() In-проекция
вектора намагниченности на внешнюю
нормаль к поверхности.
In-проекция
вектора намагниченности на внешнюю
нормаль к поверхности.
Если
тело является однородно намагниченным,
то его магнитный потенциал определяется
формулой
![]()
Если возмущающее тело имеет бесконечное простирание по одной из горизонтальных осей выражение для магнитного потенциала рассматривается в комплексной области. Комплексным магнитным потенциалом называется функция W(r)=U(r)+iV(r), где U(r)=ReW(r) – действительный потенциал; V(r)=ImW(r) – функция потока.
Магнитный
потенциал произвольно намагниченного
тела определяется формулой
![]()
Формула
Пуассона связывает магнитный потенциал
с гравитационным. Для вертикально
намагниченного шара Z и H получаем
получаем по формуле Пуассона. Обозначая
через V объем шара, гравитационный
потенциал V и производную![]() получаем
по формулам
получаем
по формулам
![]() ,
,
![]() Далее
по формулам Пуассона и Этвиша и учитывая
что
Далее
по формулам Пуассона и Этвиша и учитывая
что
![]() ,
,
![]() получим
получим
![]() ;
;![]() ;
;
![]() начало координат совмещено с центром
шара. Шар вертикально намагничен.
начало координат совмещено с центром
шара. Шар вертикально намагничен.