

2.2. Выбор усилителя мощности.
В качестве усилителя мощности целесообразно использовать электромашинный усилитель. Усилитель выбираю из следующих условий:
PЭМУ ном Pдв ном
IЭМУ ном Iдв ном
UЭМУ ном Uдв ном
Назначаю усилитель типа ЭМУ-70 с характеристиками:
номинальная мощность: 3,5 кВт
номинальное напряжение: 230 В
номинальный ток: 15,2 А
частота вращения: 1450 об/мин
КПД: 78%
Ry = 1970 Ом
Iy = 0,00273 A
Передаточная функция электромашинного усилителя:
![]()

2.3. Расчет параметров передаточной функции двигателя постоянного тока с управлением от эму.
Параметры ПФ двигателя рассчитаю с учетом нагрузки и внутреннего сопротивления источника питания, т.е. ЭМУ.
Внутреннее эквивалентное сопротивление при недокомпенсации в 30%:
Действующее сопротивление цепи ЭМУ – исполнительный двигатель:
![]()
 Коэффициент
противо ЭДС
Коэффициент
противо ЭДС

Коэффициент момента:

Суммарный момент инерции, приведенный к валу двигателя


![]()
![]()
поэтому


Выбор измерителя рассогласования.
В качестве чувствительного элемента выбираю измеритель рассогласования на базе вращающегося трансформатора.
Принимаю, что на долю измерителя рассогласования приходится 30% ошибки:
δст = 15
δир = 0,3 · δст = 4,5
В качестве измерителя рассогласования применяю вращающиеся трансформаторы типа ВТ-4С.
Датчик: ЛШ3.010.171
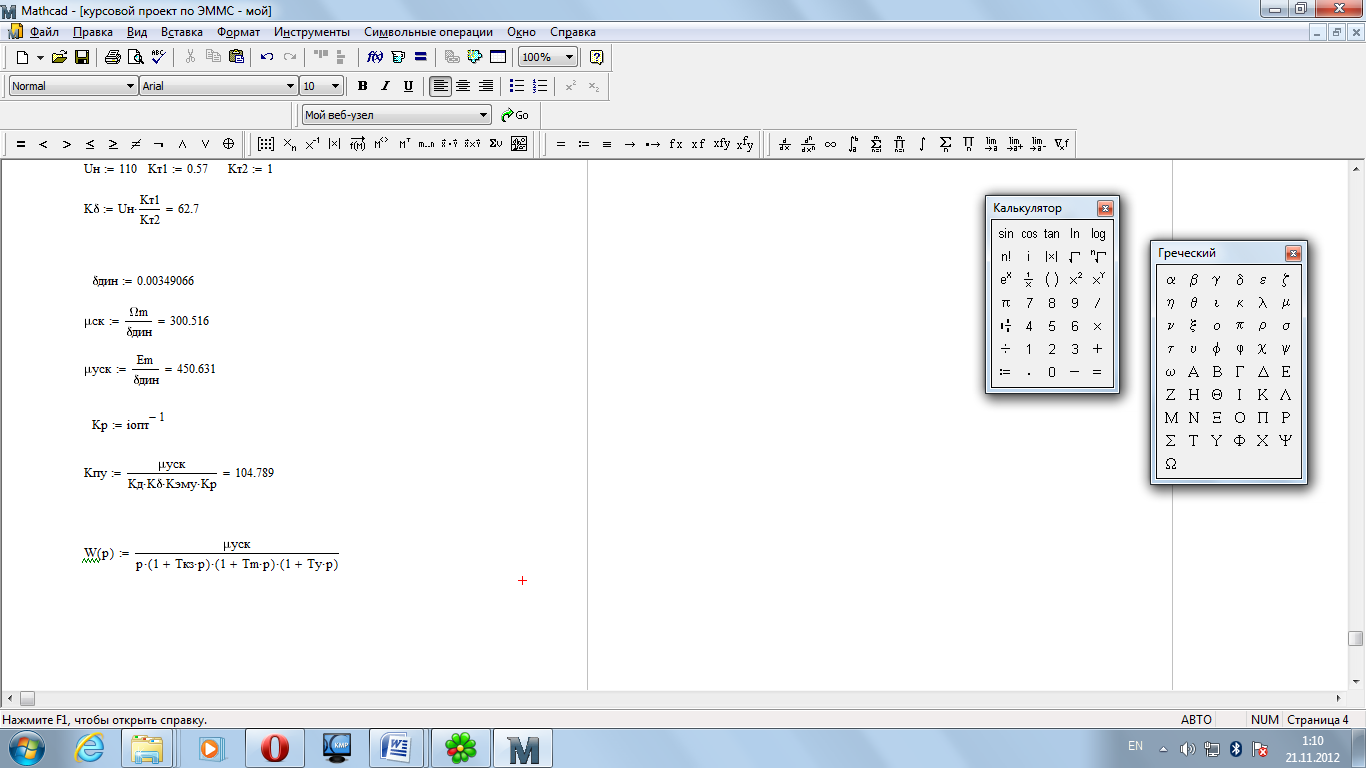
Uн = 110 В
Кт1 = 0,57
Fн = 400 Гц
Приёмник: ЛШ3.010.170
Uн = 110 В
Кт1 = 1
Fн = 400 Гц
Чувствительность измерителя рассогласования:

Расчет коэффициента усиления предварительного усилителя.
Добротность системы по скорости при заданной динамической ошибке:
Добротность системы по ускорению:

уск ск, поэтому в дальнейших расчетах использую уск.
Расчет коэффициента усиления предварительного усилителя.



Расчет параметров передаточной функции.
Звенья привода соединены последовательно, а значит ПФ системы в целом – это произведение её отдельных звеньев:
Анализ точности и устойчивости нескорректированного следящего привода.

Сопрягающие частоты



 дБ
при
дБ
при

ФЧХ имеет вид

Строим графики ЛАЧХ и ЛФЧХ (приложение 1).
Из графиков видно, что точка пересечения ЛФЧХ и ЛАЧХ находится левее чем
ЛАЧХ пересекает ось частот, следовательно эта система неустойчива.
Для повышения устойчивости системы необходимо ввести в нее корректирующее устройство.
3. Динамический расчет.
3.1. Синтез корректирующего устройства.
Строим желаемую ЛАЧХ.
Находим координаты рабочей точки:
 с-1
с-1
 рад.
рад.
 дБ.
дБ.
Рабочая точка: Ар (40; 1,18).
Находим границы среднечастотного участка:
Верхняя граница:

 дБ.
дБ.
Нижняя граница:
 дБ.
дБ.
Строим ЖЛАЧХ и определяем частоты сопряжения:
 с-1
с-1
 с-1
с-1
 с-1
с-1
Определяем вид передаточной функции скорректированной системы:

 дБ.
дБ.
 с.
с.
 с.
с.
 с
с
Строим ЖЛФЧХ:

ЖЛФЧХ изображена в приложении 3.
Теперь система обладает необходимым запасом устойчивости.
Определяем передаточную функцию корректирующего устройства:

