

Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Ковровская государственная технологическая академия»
им. В.А.Дегтярёва
Кафедра Автоматики и Управления
Курсовой проект
по дисциплине «Электромеханические и мехатронные системы»
тема: «Проектирование следящего привода промышленного робота»
Руководитель: Баранов Е.Е.
Исполнитель: Панова Т.В.
ст.гр. МС-109
Ковров 2012
Содержание
1.Техническое задание…………………………………………………………………3
2. Статический расчет……………………………………………..………...………...4
2.1. Энергетический расчет, выбор двигателя……...…………………...………4
 2.2.
Выбор усилителя мощности……………………………………...…………..8
2.2.
Выбор усилителя мощности……………………………………...…………..8
2.3. Расчет параметров передаточной функции двигателя постоянного тока с управлением от ЭМУ……………..………………………………..………6
2.4. Выбор измерителя рассогласования…………………………...……………...7
2.5. Расчет коэффициента усиления предварительного усилителя………....10
2.6. Расчет параметров передаточной функции привода………………...…...11
2.7. Анализ точности и устойчивости нескорректированного следящего привода……………………………………………………………………………….11
3. Динамический расчет…………………………………………………...…............12
3.1. Синтез корректирующего устройства……………………………………..12
3.2. Расчет параметров корректирующего устройства……………………....13
3.3. Анализ точности скорректированной системы……………………..……14
4. Построение переходного процесса…………………………………..………........15
Заключение………………………………….……………………………..…………..15
Список литературы………………………….………………………...……………...16
Приложения………………….………………………………………………………...17
1. Техническое задание
Спроектировать следящий привод промышленного робота в соответствии со следующими техническими требованиями:
Максимальная скорость слежения

Максимальное ускорение
слежения

Статическая ошибка

Динамическая ошибка
Показатель колебательности

Момент инерции нагрузки
Возмущающий момент

Статический момент

КПД редуктора


ИР - измеритель рассогласования
КУ- компенсирующее устройство
ПУ - предварительный усилитель
УМ- усилитель мощности
ДВ - двигатель
Р - редуктор
 2.
Статический расчёт.
2.
Статический расчёт.
2.1. Энергетический расчёт, выбор двигателя.
2.1.1. Определяем среднеквадратический момент нагрузки.

2.1.2. Находим ориентировочную мощность двигателя.

2.1.3. Выбираем двигатель с близкой расчётной мощностью.
Технические характеристики |
Единица измерения |
Тип двигателя |
|||
МИ-41(1) |
МИ-41(2) |
ДК1-5,2 |
ДР1 |
||
Номинальная мощность, Pном |
кВт |
1,1 |
1,1 |
0,54 |
1,12 |
Номинальная частота вращения, n |
мин-1 |
1500 |
1500 |
1000 |
3000 |
Номинальный момент, Мном |
Нм |
7,15 |
7,15 |
36,4 |
3,55 |
Номинальное напряжение, Uном |
В |
220 |
110 |
110 |
100 |
Номинальный ток, Iном |
А |
6,4 |
13 |
6,5 |
13 |
Сопротивление якоря, r |
Ом |
1,7 |
0,42 |
2,1 |
- |
Момент инерции двигателя, Yдв |
кгм2 |
0,0408 |
0,048 |
0,0039 |
0,0025 |
Масса двигателя, mдв |
кг |
- |
- |
25,8 |
16 |
Срок службы, T0 |
ч |
- |
- |
- |
- |
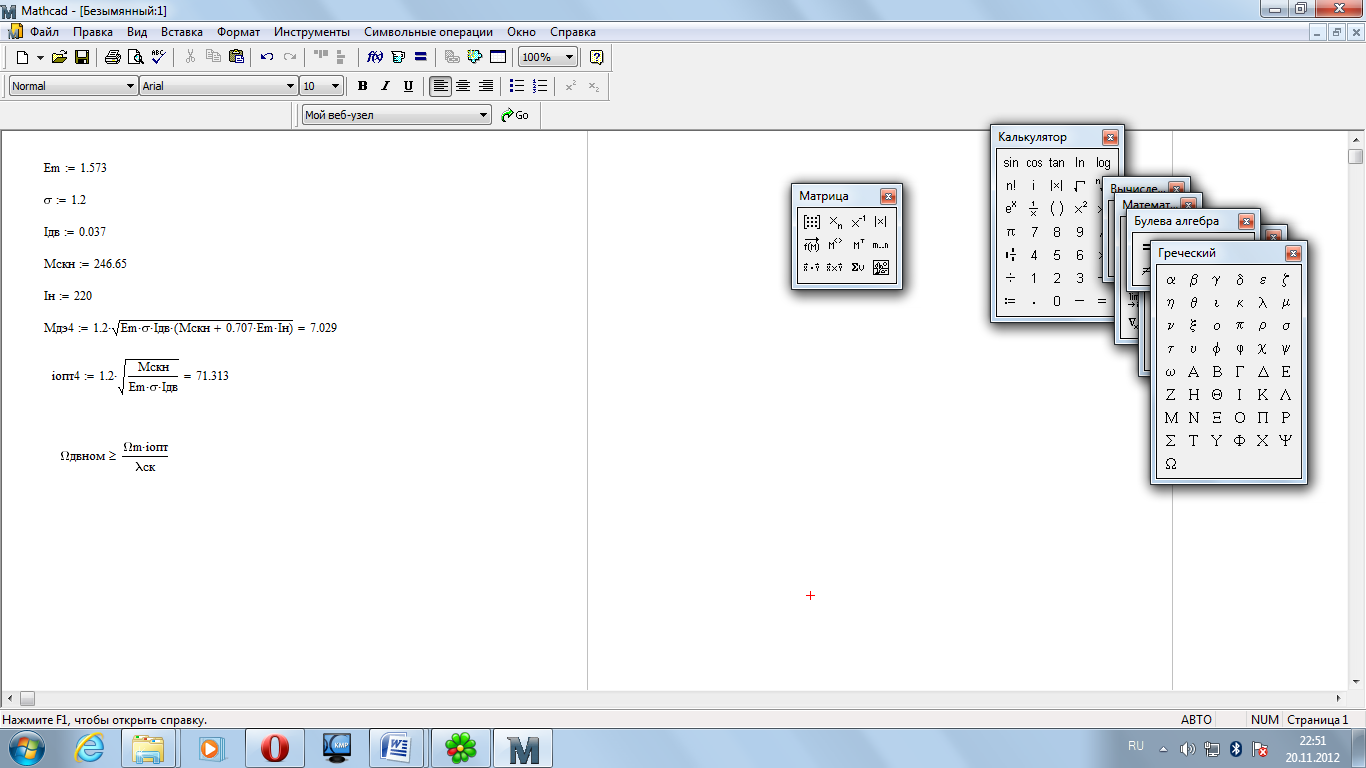
2.1.4. Вычисляем для выбранных двигателей эквивалентный момент и проверяем на перегрев.

МИ-41(1)
![]()
Мдэ1 = 5,41(Нм) ≤ Мном1 = 7,15 (Нм) – условие выполняется.
МИ-41(2)
Мдэ2 = 5,41(Нм) ≤ Мном1 = 7,15 (Нм) – условие выполняется.
ДК1-5,2
![]()
Мдэ3 = 1,67(Нм) ≤ Мном1 = 36,4 (Нм) – условие выполняется.
ДР1
![]()
Мдэ4 = 1,04(Нм) ≤ Мном1 = 3,55 (Нм) – условие выполняется.
2.1.5. Вычисляем  оптимальное
передаточное число редуктора.
оптимальное
передаточное число редуктора.



2.1.6. Проверяем условие обеспечения максимальной скорости.


1)

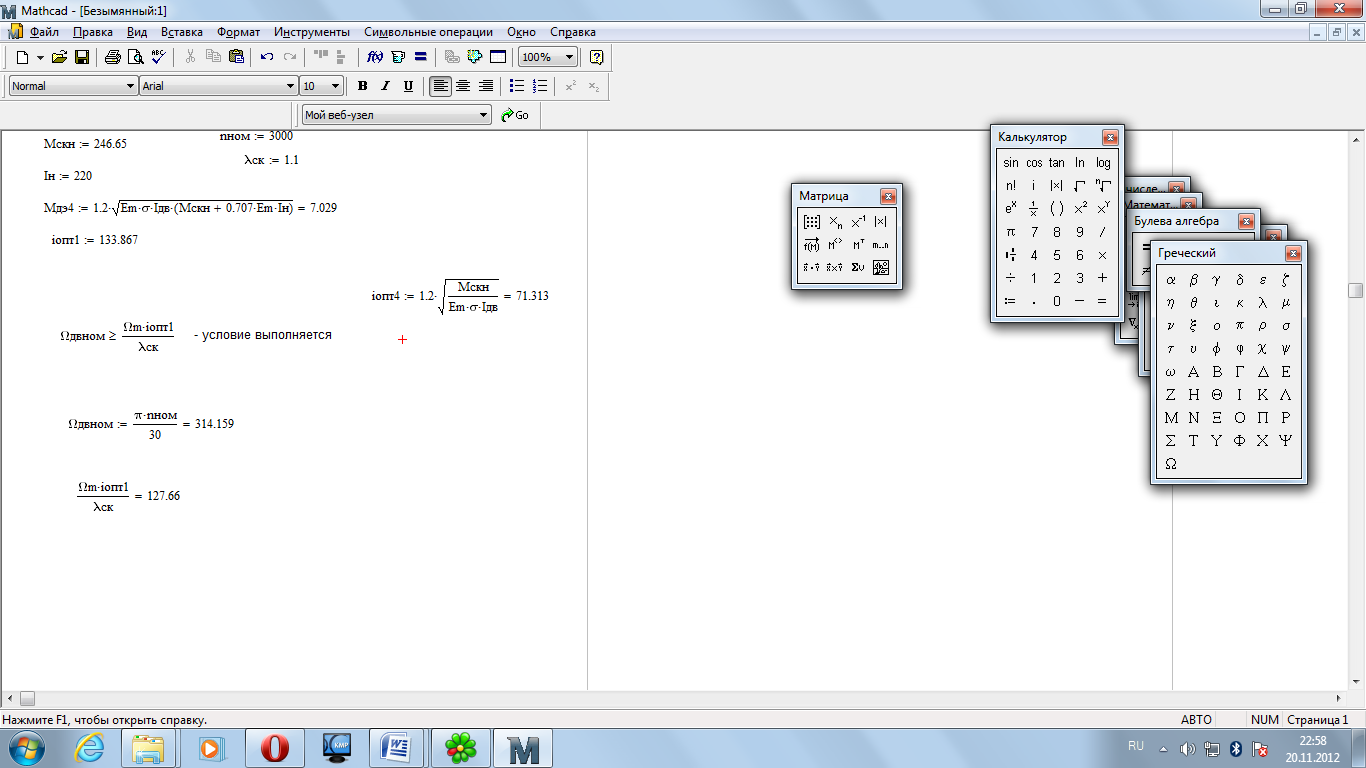


![]()





Из расчетов следует, что все двигатели удовлетворяют условиям. Также все эти двигатели имеют запас по номинальному моменту.
2.1.7. Откорректируем значение iопт.

МИ-41(1): iопт1
=
 = 221,41. Принимаем iопт1
= 221
= 221,41. Принимаем iопт1
= 221
МИ-41(2): iопт2 = = 221,41. Принимаем iопт2 = 221
ДК1-5,2:
iопт3 =
 = 147,6. Принимаем iопт3
= 148
= 147,6. Принимаем iопт3
= 148
ДР1:
iопт4 =
 = 442,82. Принимаем iопт4
= 443
= 442,82. Принимаем iопт4
= 443
2.1.8. Проверяем выбранные двигатели на перегрузку.

Мдв.ном1 = 7,15 (Нм)
![]()

Перегрузка отсутствует.
Мдв.ном2 = 7,15 (Нм)

Перегрузка отсутствует.
Мдв.ном3 = 36,4 (Нм)
![]()

Перегрузка отсутствует.
Мдв.ном4 = 3,55 (Нм)
![]()

Перегрузка отсутствует.
 Выбираем
двигатель с меньшей массой и большим
сроком службы: МИ-41(1)
Выбираем
двигатель с меньшей массой и большим
сроком службы: МИ-41(1)