

40. Методика управления магниторезистивным преобразователем на основе амр-эффекта
Эффективность регистрации параметров магнитного поля, по средствам рассмотренных выше устройств во многом зависит от выбора методики управления сенсорным модулем и варианта схемотехнической реализации непосредственно систем управления подмагничиванием и компенсации постоянной составляющей помех.
Рассмотрим методику управления магниторезистивным измерительным преобразователем на примере сенсора, построенного на базе АМР-эффекта.
Считая, что максимальная мощность рассеяния элемента подмагничивания известна, очевидно, что реализуя импульсный режим его возбуждения, при условии соблюдения условия (6.13), кратковременно допустимы значительно большие значения тока, нежели в случае возбуждения постоянным током.
 (6.13)
(6.13)
где T – период подмагничивающего токового импульса; Iи(t) – функция тока подмагничивающего импульса от времени; I – максимально допустимый постоянный ток возбуждения катушки подмагничивания.
На рис. 6.9 представлена методика, посредством которой предлагается осуществлять управление работой АМР-датчика [26].
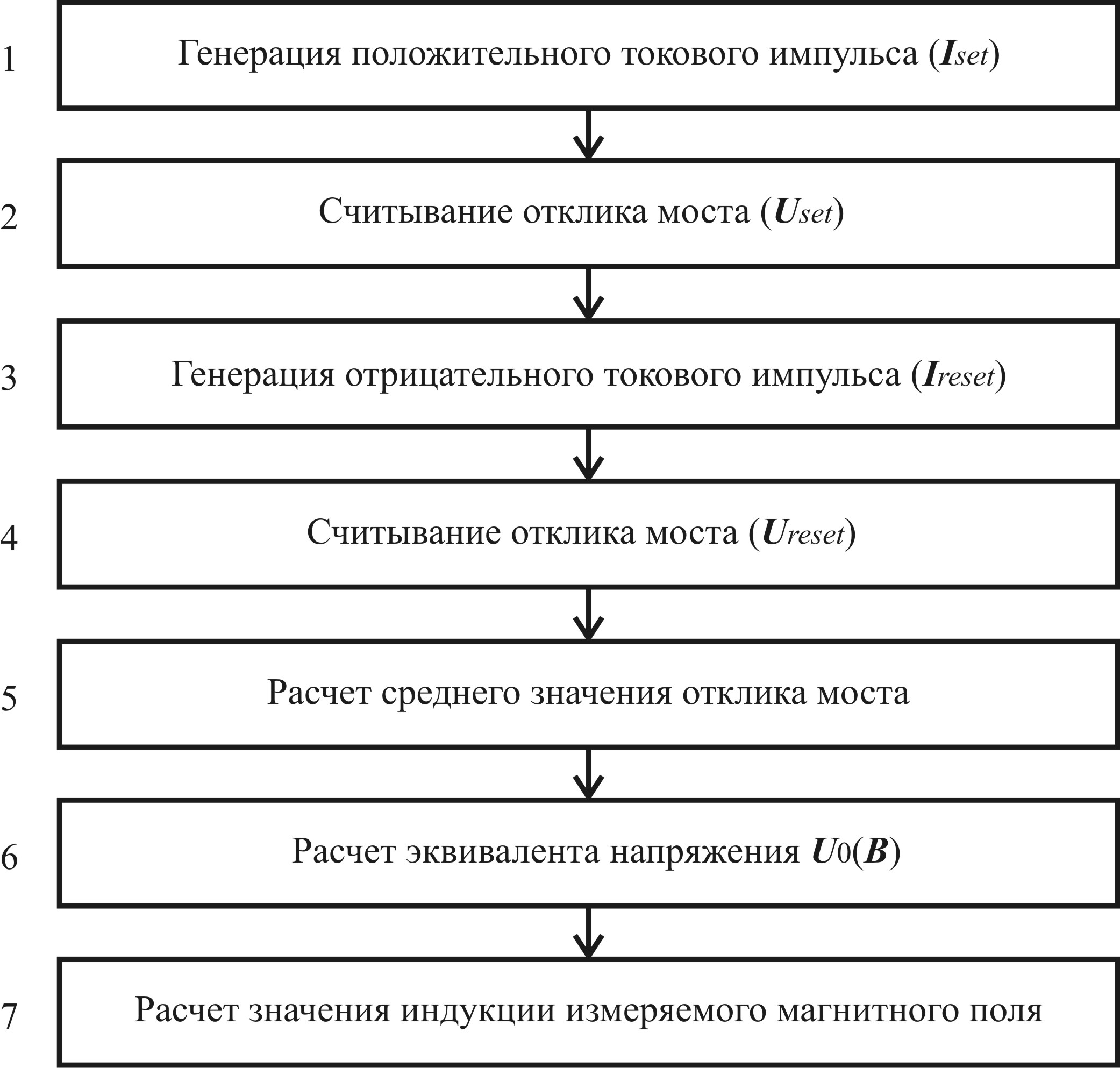
Рис. 6.9. Методика управления работой АМР-измерительным преобразователем
Далее, приведем некоторые разъяснения по сути данной методики с физической точки зрения.
В исходном состоянии, при условии отсутствия внешнего магнитного поля, ориентация магнитных моментов АМР-элемента хаотична (рис. 6.10, а) и его суммарный магнитный момент равен нулю. При воздействии на элемент внешнего магнитного поля, параметры которого стремимся измерить, магнитные домены пермаллоя приобретают преимущественную ориентацию, в целом, совпадающую с направлением индукции внешнего поля (рис. 6.10, б).
В результате протекания через подмагничивающую катушку токового импульса Iset, генерируется импульсное поле B0, эффект воздействия которого на магниторезистивный элемент продемонстрирован на рис. 6.10, в.
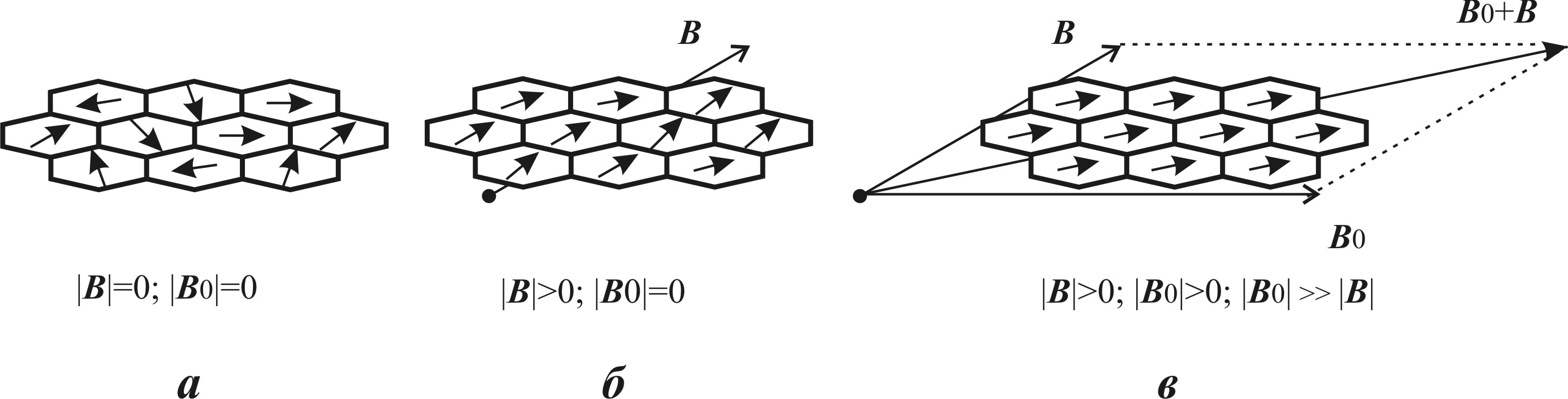
Рис. 6.10. Изменение магнитного состояния АМР пленки в процессе измерения магнитной индукции внешнего поля B
После считывания и регистрации отклика магниторезисторов, соединенных по мостовой схеме, следует генерация токового импульса противоположной полярности, в результате чего магнитные домены принимают соответствующую ориентацию. И далее, аналогично предыдущему воздействию, фиксируем отклик измерительной диагонали моста, после чего производим расчет среднего значения отклика моста в соответствии с выражением (6.14).
 (6.14)
(6.14)
Согласно выражению (6.15) определяем значение напряжения U0(B), пропорциональное в конечном итоге индукции исследуемого магнитно поля.
 (6.15)
(6.15)
Имея численное значение эквивалента напряжения, и зная функцию соответствия выхода датчика к внешнему воздействию U0(B) (выражение (5.13)), не представляет затруднений рассчитать параметр магнитной индукции исследуемого поля.