

41)Приведение к скорости двигателя сил сопротивления в элементе поступательного движения
Сила сопротивления в механизме FСМ , направлена по оси поступательного движения.
Рассмотрим приведение FСМ при двигательном режиме работы электропривода. В этом случае поток энергии направлен от двигателя к рабочей машине. Уравнение баланса мощности запишется следующим образом :
 ,
(1)
,
(1)
где
 -
общий КПД передач и рабочей машины.
-
общий КПД передач и рабочей машины.
Из (1) определяется статический момент сопротивления, приведенный к валу двигателя :
 ,
(2)
,
(2)
Из (2) определяется статическое усилие, приведенное к валу двигателя :
 .
(3)
.
(3)
Здесь
отношение ( )
является обобщенным передаточным
отношением между рабочей машиной и
двигателем.
)
является обобщенным передаточным
отношением между рабочей машиной и
двигателем.
42) Получение трех массовой расчетной модели в результате приведения к скорости двигателя параметров кинематической схемы. Система уравнений
М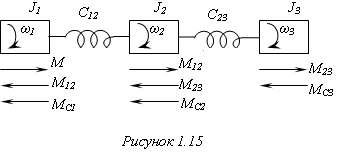 оменты
инерции
оменты
инерции
 ;
;
 ;
;
 ,
,

1) для
упругого вытягивания каната с коэффициентом
жесткости

 ,
,
Так
как скорость упругой деформации в
реальном и эквивалентном упругих
элементах одна и та же, то
 ,
,
 ,
откуда
,
откуда
 ;
;
2) для
упругого закручивания вала барабана с
коэффициентом жесткости

 ,откуда
,откуда
3) для
упругого закручивания промежуточного
вала с коэффициентом жесткости

 ,
откуда
,
откуда
 так
как
так
как ,
то
,
то .
.
Заменяя одним
упругим элементом получим
 ,
,
 ,
, ,
,
 .
.
Здесь
 -
момент внутреннего вязкого трения в
упругом элементе,
-
момент внутреннего вязкого трения в
упругом элементе,
 - коэффициент внутреннего вязкого трения
в Нм∙с.
На
вторую массу с моментом инерции
- коэффициент внутреннего вязкого трения
в Нм∙с.
На
вторую массу с моментом инерции
 действует
момент сопротивления
действует
момент сопротивления
 ,
,
 ,
,
 .
. ,
,
Таким образом, движение трехмассовой механической системы электропривода можно описать следующей системой из 3-х уравнений движения, записанных для каждой из вращающихся масс:
 ;
;

 ;
;

 .
.
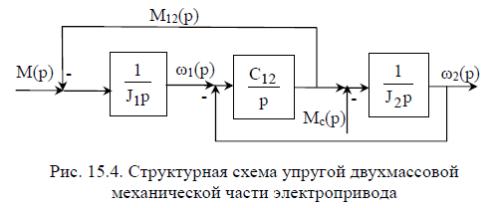
43) Одержання двомасової розрахункової динамічної моделі в результаті приведення до швидкості двигуна параметрів кінематичної схеми. Система рівнянь.
Н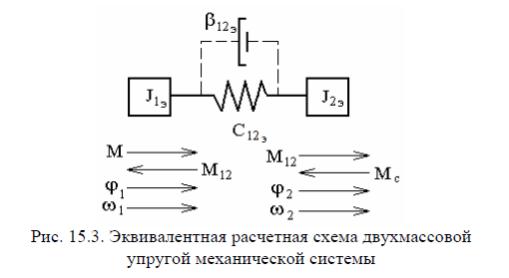 а
практике чаще используют эквивалентную
расчетную схему двухмассовой
упругой
системы к которой приводят многомассовую
механическую систему. В схеме обобщенными
координатами являются угловые
перемещения масс ϕ1,
ϕ2
и
соответствующие им обобщенные
угловые скорости ω1,
ω2.
Статические моменты, обусловленные
силами трения в элементах кинематической
цепи первой (J1Э)
и второй (J2Э)
масс, ввиду
а
практике чаще используют эквивалентную
расчетную схему двухмассовой
упругой
системы к которой приводят многомассовую
механическую систему. В схеме обобщенными
координатами являются угловые
перемещения масс ϕ1,
ϕ2
и
соответствующие им обобщенные
угловые скорости ω1,
ω2.
Статические моменты, обусловленные
силами трения в элементах кинематической
цепи первой (J1Э)
и второй (J2Э)
масс, ввиду
и![]() х
малости приняты равными нулю. В расчетной
схеме действуют: М – момент двигателя,
M12
–
момент упругой деформации, Мс
–
статический момент исполнительного
органа рабочей машины. Кроме того, на
схеме приведены: C12
–
жесткость упругой связи между массами,
β12э
–
коэффициент внутреннего вязкого трения.
Используем уравнение Лагранжа для
получения математической модели
двухмассовой механической части ЭП.
Запас кинетической энергии и обобщенные
координаты
х
малости приняты равными нулю. В расчетной
схеме действуют: М – момент двигателя,
M12
–
момент упругой деформации, Мс
–
статический момент исполнительного
органа рабочей машины. Кроме того, на
схеме приведены: C12
–
жесткость упругой связи между массами,
β12э
–
коэффициент внутреннего вязкого трения.
Используем уравнение Лагранжа для
получения математической модели
двухмассовой механической части ЭП.
Запас кинетической энергии и обобщенные
координаты
![]() Элементарные работы, совершаемые
действующими силами, приложенными к
первой (δА1)
и второй (δА2)
массам:
Элементарные работы, совершаемые
действующими силами, приложенными к
первой (δА1)
и второй (δА2)
массам:
Тогда уравнения Лагранжа для двухмассовой механической части электропривода будут иметь следующий вид.
Для первой массы:
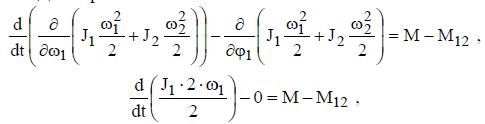
Д![]() ля
второй массы в результате аналогичных
вычислений получаем:
ля
второй массы в результате аналогичных
вычислений получаем:
![]()
О![]() чевидно,
что эти уравнения являются аналогами
основного уравнения движения ЭП. Для
полного описания динамики необходимо
уравнение для М12.
чевидно,
что эти уравнения являются аналогами
основного уравнения движения ЭП. Для
полного описания динамики необходимо
уравнение для М12.
![]()
В окончательном виде получим
М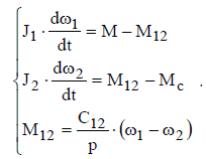
 атематическая
модель двухмассовой упругой механической
части электропривода получается из
последних уравнений:
атематическая
модель двухмассовой упругой механической
части электропривода получается из
последних уравнений:
В данной математической модели отсутствует учет диссипативных сил – внутреннего трения, определяемых коэффициентом внутреннего вязкого трения β12, и внешнего трения, поскольку статические моменты, обусловленные силами трения в элементах кинематической цепи первой и второй масс были приняты равными нулю.
44) Одержання одно масової розрахункової динамічної моделі в результаті її перетворення з двомасової моделі за умови С12 = бесконечности
Электромеханическая система с 2-х массовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих связей.
В тех случаях,
когда влияние упругих связей незначительно
или при решении задачи ими можно
пренебречь, механическая часть
электропривода представляется простейшей
расчетной схемой
– жестким
приведенным механическим звеном, т.е.
многомассовая механическая часть
эл.привода с моментами инерциями J1
,J2
и т.д. заменяется действием одного
момента инерции Jnp,
приведенного к расчетной скорости.
Суммарный приведенный момент инерции
эл.привода в этом случае определяется
как
 ,
где
,
где
J – момент инерции двигателя; n, k – число элементов установки, совершающих соответственно вращательное и поступательное движение.
Суммарные приведенный
к валу двигателя момент статического
сопротивления в общем виде можно
представить как:
 ,
где
,
где
p,q – число внешних моментов Мi и сил Fj, приложенных к системе кроме электромагнитного момента двигателя.