

МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И ЗАЩИТА ЭВС.
Внешние воздействующие факторы. Классификация.
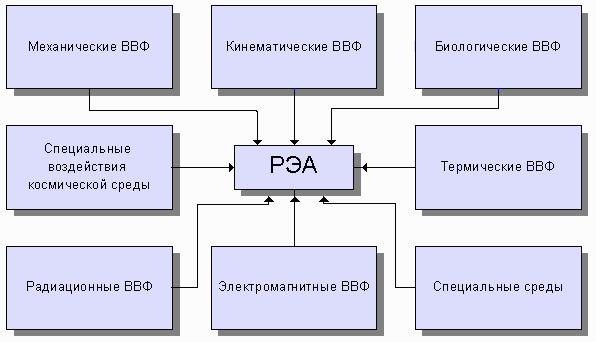
Классификация внешних воздействий:
* Не кинематические ВВФ, а климатические ВВФ.
Механические и внешние воздействующие факторы:
Колебания.
Удар – кратковременное воздействие внешней силы.
Ускорение.
Механическое давление.
Сила.
Момент и распределенный момент.
Поток жидкости.
Климатические ввф.
Атмосферное давление:
Температура среды:
Атмосферные осадки.
Туман (образуется конденсат).
Пыль.
Песок (например, песчаная буря, песок во время песчаной бури пробирается куда только можно).
Солнечное излучение (обладает тепловым воздействием, ультрафиолет, наличие фотоэффекта).
Поток воздуха.
Среда с высокими коррозионно-активными агентами.
Ледово-грунтовая среда.
Радиационные ВВФ (ионизирующие воздействующие излучения).
 .
. .
.Рентгеновское излучение.
Протонное излучение.
Нейтронное излучение.
Электронное излучение
Излучение многозаряженных частиц.
Электромагнитные ВВФ.
Электрический ток.
Электрическое поле.
Лазерное излучение.
Электромагнитный импульс ядерного взрыва (следствие – электромагнитный импульс).
Биологические ВВФ.
Воздействие живых существ.
Кислотно-щелочная и нейтральная среда.
Масла и смазки, топливо, специальные среды.
Термические ВВФ.
Световое излучение ядерного взрыва.
Термический удар.
Аэродинамический нагрев.
Нагрев трением.
Нагрев тепловым потоком.
Пламя.
ВНЕШНИЕ ВОЗДЕЙСТВУЮЩИЕ ФАКТОРЫ КОСМИЧЕСКОЙ СРЕДЫ.
Космические воздействия при эксплуатации ЭС характеризуются совокупностью следующих факторов: электромагнитных и корпускулярных излучений, глубокого вакуума, лучистых тепловых потоков, невесомости, метеорных частиц, магнитных и гравитационных полей планет и звезд и др.
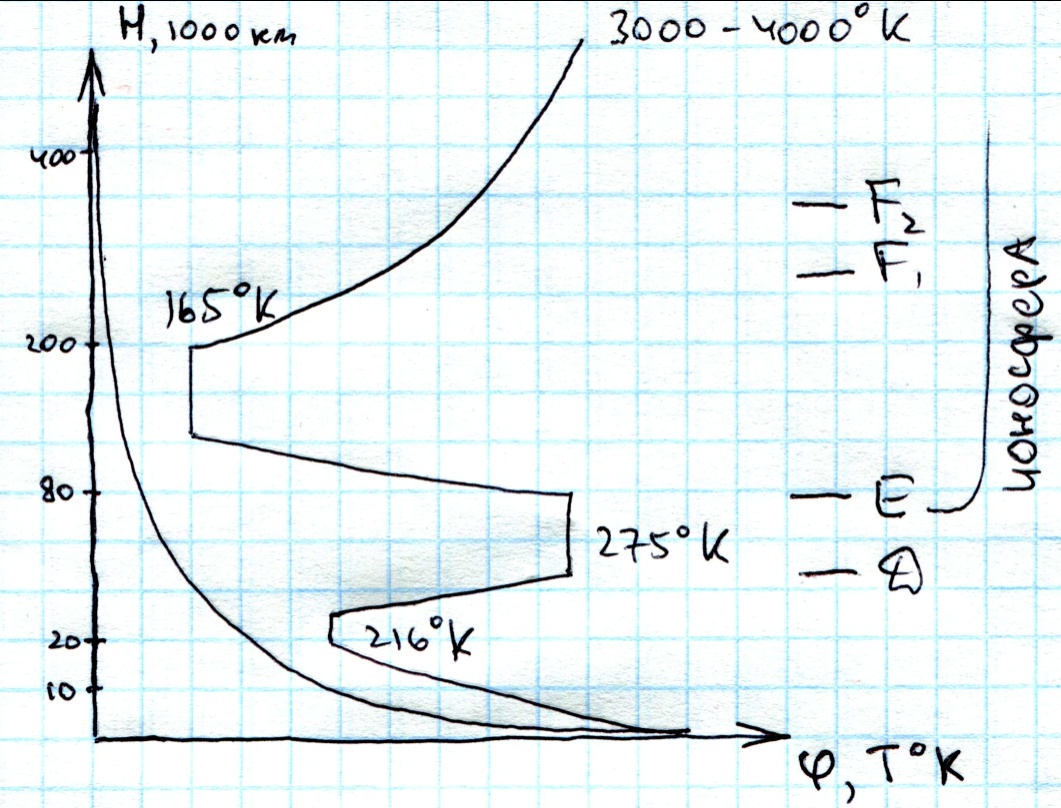
Километровые волны – распределяются по поверхности Земли.
Длинные волны – распределяются от источника на определенном расстоянии.
Средние волны – лучше ловят ночью, из-за высокой ионосферы (днем солнечные лучи давят на ионосферу и опускают ее к Земле).
Короткие волны – многократно отражаются от ионосферы и многократно огибают Землю.
Ультракороткие волны – для них ионосфера прозрачна, т.е. они проходят сквозь нее. Есть области, где ионосфера не пропускает УКВ.
Радиационные пояса:
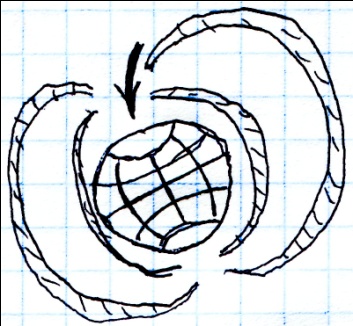
Как защитить от электронизации? Покрыть специальным покрытием на основе солей свинца.
МЕХАНИКА
4. Особенности проекторования системы виброизоляции при однонаправленной схеме нагружения
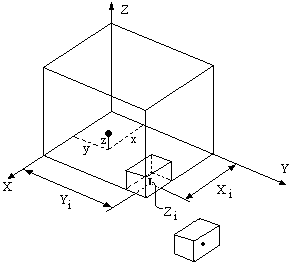
Статический расчет системы. Определение координат центра тяжести объекта.
Исходным при проектировании системы амортизации являются не только параметры внешних механических воздействий, но и законченная компоновка устройства, т.е. считаются известными габариты устройства (блока), место установки, габариты, масса различных частей блока (узлы, детали), кроме этого существуют ограничения на типоразмер амортизатора. Необходимым является наличие всех характеристик для применяемого типа амортизатора.
На первом этапе в блоке аппаратуры выделяются элементарные узлы простейшей геометрической формы. При этом из сборочного чертежа всегда можно определить координаты центра тяжести этого элементарного блока относительно любой выбранной первоначальной системы координат. Для элементарного блока координаты его центра тяжести должны быть достаточно просто определяемыми. Рекомендуется первоначально выбирать систему так, чтобы одна ось проходила через ребро куба.

Определение реакций амортизаторов.
Различают две схемы нагружения амортизаторов: а) однонаправленная схема; б) пространственная схема нагружения.
а) Однонаправленная схема нагружения должна отвечать следующим условиям:
реакция виброизоляторов и нагрузка на них образуют систему параллельных сил;
блок в положении равновесия должен устанавливаться без перекосов;
г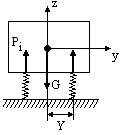 де
G - суммарный вес блока,
Pi
-реакции амортизаторов.
де
G - суммарный вес блока,
Pi
-реакции амортизаторов.
Эта система возможна при установке блоков без перекосов.
В однонаправленной схеме нагружения неизвестной является реакция амортизатора и число неизвестных зависит от количества амортизаторов. Реакции виброизоляторов определяются на основе уравнений статистики. Для однонаправленной схемы:
|
My = 0; Mx = 0; n – число амортизаторов; |

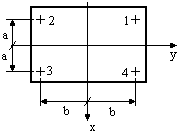
При n = 3, ищем P1, P2, P3, (система из 3-х уравнений). При n = 3 система статически определима, и мы из исходной системы непосредственно находим три неизвестных реакции. При n = 4 система статически неопределима и необходимо четвертое уравнение. Его получают за счет введения дополнительного условия на расположение амортизаторов.
Дополнительные условия задаются за счет соответствующего выбора координат установки амортизаторов. Для такой системы P1 = P2 = P3 = P4 = G/4 . Здесь дополнительное условие – симметрия виброизоляторов – вылилось в подобное решение системы.
1. |
|
Всегда
при
 и
и
 реакция P1 = P2
= … = Pn
= G/n
реакция P1 = P2
= … = Pn
= G/n
2. Здесь дополнительное условие таково:
|
P1+P2 = P3+P4; (P1+P4)b’ = (P2+P3)b; P2 = P3; P1 = P4. |
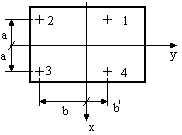
Для того, чтобы система была статически определима необходимо задать n - 3 дополнительных условия!
5. Конструктивные особенности системы виброизоляции
Конструктивные особенности системы амортизации.
Основной особенностью, определяющей вид неравенства Релея, является наличие плоскости в системе. Плоскость симметрии – это плоскость, относительно которой симметричны:
массы частей блока;
координаты установки амортизаторов.
Различаются следующие системы амортизации:
Система с 3-мя плоскостями симметрии.
Система с 2-мя плоскостями симметрии.
Система с 1-ой плоскостью симметрии.
Система без плоскостей симметрии.
Различные системы имеют различный вид неравенства Релея и различную точность в определении частот.
Система 3-мя плоскостями симметрии.
|
Симметрия: XOY XOZ YOZ |
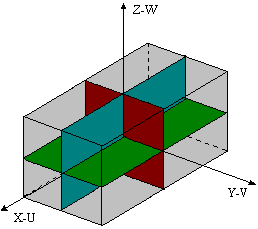
Равенство (симметричность) масс выдерживается автоматически, т.к. оси проходят через центр тяжести блока и через них проводится плоскость симметрии.
Координаты виброизоляторов должны быть симметричны.
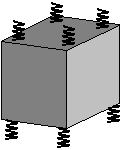
Система с 8-ю амортизаторами: 4 под и 4 над блоком. Ее свойства:
|
а) случай не рациональный, т.к. велико число амортизаторов, вполне достаточно 4-х. б) усложнен расчет и монтаж такой системы.
|
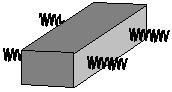
Система с 4-мя амортизаторами Zi = 0. т.е. установка виброизоляторов в плоскости XOY. Свойства: при строгом решении исходной системы 6-ти дифференциальных уравнений подобной системы амортизации наличие плоскости симметрии масс частей блоков, координат установки амортизаторов, жесткостные параметры амортизации приводит к тому, что указанная система уравнений разбивается на 6 независимых уравнений. Из каждого уравнения может быть точно определена своя собственная частота.
|
|

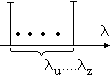
это вырожденное неравенство Релея-Донкерли для N = 1.

Т.о. на оси частот имеем 6 дискретных собственных частот.
Во
всех случаях желательно сужать диапазон
собственных частот. В данной системе
амортизации возможно при введении
дополнительных условий добиться
равенства всех собственных частот:
 и на оси частот имеем одну дискретную
частоту.
и на оси частот имеем одну дискретную
частоту.
Э ти
дополнительные условия имеют вид:
ти
дополнительные условия имеют вид:
а) Динамические жесткости виброизоляторов и соответствующие системы амортизации по всем направлениям должны быть равны: Cgu = Cgv = Cgw.
б) Координаты «Х» виброизоляторов должны быть равны радиусу инерции относительно оси «Y», а координаты «Y» виброизоляторов должны быть равны радиусу инерции относительно оси «Х».

Недостаток:
для большинства амортизаторов: Cgu
= Cgv
 Cgw.
Cgw.