

Компенсационные измерительные схемы.
Компенсационный метод (метод противопоставления) измерения заключается в уравновешивании, осуществляемом включением на индикатор равновесия (гальванометр или реохорд) либо двух электрически не связанных между собой, но противоположно направленных напряжений или ЭДС, либо двух раздельно регулируемых токов. Компенсационный метод используют для непосредственного сравнения напряжений или ЭДС, тока и косвенно для измерения других электрических, а также неэлектрических величин, преобразуемых в электрические.
Компенсационный метод обеспечивает высокую точность измерения. На нем работают все потенциометры и мосты.
П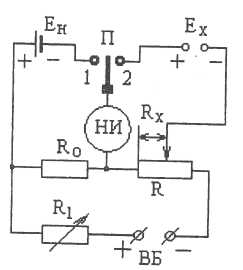 ринцип
действия компенсатора основан на
уравновешивании (компенсации)
измеряемого напряжения известным
падением напряжения на образцовом
резисторе. Момент полной компенсации
фиксируется по показаниям индикаторного
прибора (нуль-индикатор).
ринцип
действия компенсатора основан на
уравновешивании (компенсации)
измеряемого напряжения известным
падением напряжения на образцовом
резисторе. Момент полной компенсации
фиксируется по показаниям индикаторного
прибора (нуль-индикатор).
У![]() прощенная
схема компенсатора постоянного тока
приведена на следующем рисунке. Схема
содержит источник образцовой ЭДС Ен,
образцовый резистор Ro
, вспомогательный
источник питания ВБ, переменное
(компенсационное) сопротивление R,
регулировочный реостат R,
и нуль-индикатор НИ. Нуль-индикатором
служит обычно гальванометр с нулем
посредине шкалы. В качестве образцовой
ЭДС используется нормальный элемент-
изготавливаемый по специальной
технологии гальванический элемент,
среднее значение э.д.с. которого при
температуре 20 °С известно и равно
прощенная
схема компенсатора постоянного тока
приведена на следующем рисунке. Схема
содержит источник образцовой ЭДС Ен,
образцовый резистор Ro
, вспомогательный
источник питания ВБ, переменное
(компенсационное) сопротивление R,
регулировочный реостат R,
и нуль-индикатор НИ. Нуль-индикатором
служит обычно гальванометр с нулем
посредине шкалы. В качестве образцовой
ЭДС используется нормальный элемент-
изготавливаемый по специальной
технологии гальванический элемент,
среднее значение э.д.с. которого при
температуре 20 °С известно и равно
Ен = 100186 В. Процесс измерения напряжения состоит из двух операций: установления рабочего тока и уравновешивания измеряемого напряжения. Для установления рабочего тока переключатель П ставят в положение 1 и, регулируя сопротивление Ri, добиваются отсутствия тока в гальванометре. Это будет иметь место в том случае, когда падение напряжения на резисторе Ro станет равным ЭДС нормального элемента:
При этом рабочий ток в цепи R;,R0,R
П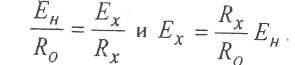 осле
установки рабочего тока переключатель
П устанавливается в по ложение 2 и, не
изменяя рабочего тока, устанавливают
такое значение сопротивления R
= Rx
,
при котором измеряемое напряжение Ех
будет уравновешено падением напряжения
/ • Rx
и
ток в цепи гальванометра снова будет
отсутствовать. Отсюда
осле
установки рабочего тока переключатель
П устанавливается в по ложение 2 и, не
изменяя рабочего тока, устанавливают
такое значение сопротивления R
= Rx
,
при котором измеряемое напряжение Ех
будет уравновешено падением напряжения
/ • Rx
и
ток в цепи гальванометра снова будет
отсутствовать. Отсюда
Одно из основных достоинств компенсаторов - отсутствие потребления мощности от объекта измерения, т.е. возможность измерения ЭДС.
Погрешность компенсатора определяется погрешностями резисторов R,R0 . ЭДС нормального элемента, а также чувствительностью индикатора. Современные потенциометры постоянного тока выпускаются классов точности от 0,0005 до 0,2.
В современных конструкциях компенсаторов вместо нормального элемента используются стабилизированные источники напряжения с более высоким" значением Ен , что позволяет расширить верхний предел измерения компенсатора до нескольких десятков вольт.
Компенсационные методы используются также для измерения на переменном токе.
Классификация исполнительных механизмов.
Исполнительные механизмы.
Исполнительный механизм (ИМ)– устройство для преобразования управляющей информации в механическое перемещение с располагаемой мощностью, достаточной для воздействия на объект управления.
ИМ являются одними из последних звеньев систем автоматического регулирования и управления и обычно предназначены для управления регулирующими органами, непосредственно воздействующими на режимы работы объектов управления. Регулирующими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие элементы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов.
Наиболее часто регулирующий орган является неотъемлемой частью самого ИМ и рассматривается как единое вместе с ним устройство. В других случаях регулирующий орган установлен на объекте управления и является его составной частью.
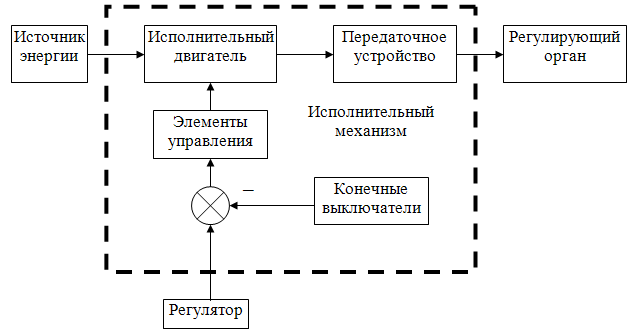
В общем случае ИМ состоит (см. рисунок ) из совокупности следующих элементов: исполнительного двигателя – источника силового воздействия на рабочий орган; передаточного или преобразовательного устройства - предназначенного для получения определенной скорости, направления и характера перемещения рабочего органа, располагающегося между исполнительным двигателем и рабочим органом; конечных выключателей - ограничивающих перемещения рабочего органа и фиксирующих его крайние положения в схемах управления и автоматического регулирования; элементов управления (пускателей, реле, золотников, клапанов и др.), защиты (предохранительных и переливных клапанов, муфт ограничения крутящего момента и др.), сигнализации и контроля (дистанционных указателей положения и др.)
Состав ИМ.
Классификация ИМ.
Принято различать ИМ по следующим признакам:
1. По виду математического описания:
а) линейные;
б) нелинейные.
2. По виду сигналов:
а) непрерывные;
б) релейные;
в) вибрационные.
3. По виду используемой энергии:
а) электрические;
б) пневматические;
в) гидравлические;
г) комбинированные.
Общие требования к исполнительным механизмам в системах автоматизации
Исполнительные механизмы в системах переработки и использования технологической информации предназначены для непосредственного воздействия на регулируемый процесс или через регулирующий орган.
Исполнительные механизмы обязательно содержат исполнительные серводвигатели различных типов и различной физической природы. Кроме того, содержат также различные датчики, устройства усиления и переработки информации, переключательные устройства и устройства обратной связи.
Исполнительные механизмы или сервоприводы в общем случае включают в себя цепи усиления, переключатели и исполнительные двигатели.
Исполнительные механизмы. По виду воздействия на состояние системы автоматизации исполнительные механизмы принято подразделять на силовые и параметрические.
Силовые исполнительные механизмы создаютна своем выходе силу или момент, которые однозначно определяют соответствующее положение рабочего органа. I Параметрические исполнительные механизмы служат для изменения параметров, характеризующих данный рабочий орган.
Основными определяющими характеристиками исполнительных механизмов являются:
•быстродействие;
•точность;
рабочий диапазон;
полоса рабочих частот;
•максимальная полезная мощность;
•максимальная и номинальная нагрузки;
пусковая и рабочая нагрузки;
• мощность, необходимая для управления;
• коэффициент полезного действия;